TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024071199
公報種別
公開特許公報(A)
公開日
2024-05-24
出願番号
2022182029
出願日
2022-11-14
発明の名称
コンピュータプログラム、情報処理端末、及びその制御方法
出願人
株式会社バンダイ
,
株式会社バンダイナムコピクチャーズ
代理人
弁理士法人大塚国際特許事務所
主分類
G06T
19/00 20110101AFI20240517BHJP(計算;計数)
要約
【課題】本発明は例えば、現実空間の撮像画像に好適にオブジェクトを合成して出力する仕組みを提供する。
【解決手段】本情報処理端末は、所定の模型を含む周辺環境を撮像し、撮像された撮像画像の各画素について、カメラからの距離情報を取得する。また、本情報処理端末は、撮像画像に含まれる所定の模型の少なくとも1つのパーツの姿勢及びカメラからの距離に関する情報を認識し、認識した少なくとも1つのパーツを基準に、生成するオブジェクトの位置情報を決定する。さらに、本情報処理端末は、生成するオブジェクトの各画素のうち、それぞれの位置情報が撮像画像の対応する画素の距離情報よりもカメラに近いことを示す画素をオブジェクトとして描画し、オブジェクト画像を生成し、撮像画像にオブジェクト画像を重畳した合成画像を表示部に出力する。
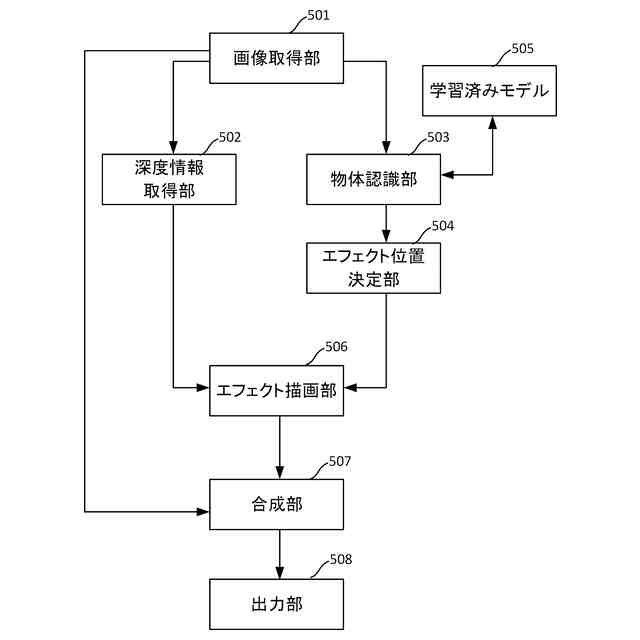
【選択図】図5
特許請求の範囲
【請求項1】
情報処理端末のコンピュータを、
所定の模型を含む周辺環境を撮像する撮像手段と、
前記撮像手段によって撮像された撮像画像の各画素について、前記撮像手段からの距離情報を取得する取得手段と、
前記撮像画像に含まれる前記所定の模型の少なくとも1つのパーツの姿勢及び前記撮像手段からの距離に関する情報を認識する認識手段と、
前記認識手段によって認識した前記少なくとも1つのパーツを基準に、生成するオブジェクトの位置情報を決定する位置決定手段と、
前記生成するオブジェクトの各画素のうち、それぞれの位置情報が前記撮像画像の対応する画素の距離情報よりも前記撮像手段に近いことを示す画素をオブジェクトとして描画し、オブジェクト画像を生成するオブジェクト生成手段と、
前記撮像画像に前記オブジェクト画像を重畳した合成画像を表示部に出力する出力手段と、
として機能させることを特徴とするコンピュータプログラム。
続きを表示(約 1,100 文字)
【請求項2】
前記オブジェクト生成手段は、前記生成するオブジェクトの各画素のうち、それぞれの位置情報が前記撮像画像の対応する画素の距離情報よりも前記撮像手段に近いことを示さない画素については描画しないことを特徴とする請求項1に記載のコンピュータプログラム。
【請求項3】
前記情報処理端末のコンピュータを、さらに、前記所定の模型を含む撮像画像に対して合成するエフェクトを選択する選択手段として機能させ、
前記認識手段は、前記選択されたエフェクトに関連するパーツを認識することを特徴とする請求項2に記載のコンピュータプログラム。
【請求項4】
前記認識手段は、撮像画像を入力とし、前記所定の模型のパーツごとに形状、角度、及び距離に関する情報を出力するように学習させた学習済みモデルを用いて、前記選択されたエフェクトに関連するパーツを認識することを特徴とする請求項3に記載のコンピュータプログラム。
【請求項5】
前記オブジェクト生成手段は、前記選択手段によって選択されたエフェクトに対応する、予め記憶されているオブジェクトのモデル情報に基づいて、前記オブジェクト画像を生成することを特徴とする請求項3に記載のコンピュータプログラム。
【請求項6】
前記位置決定手段は、前記少なくとも1つのパーツの姿勢及び前記撮像手段からの距離に関する情報に基づいて、前記生成するオブジェクトの角度及び距離に関する情報を含む前記位置情報を決定することを特徴とする請求項1に記載のコンピュータプログラム。
【請求項7】
前記所定の模型の前記少なくとも1つのパーツとは、頭部、胸部、腹部、腰部、腕部、及び脚部の少なくとも1つであることを特徴とする請求項3に記載のコンピュータプログラム。
【請求項8】
前記選択されたエフェクトに関連するパーツとは、前記生成するオブジェクトの近傍に位置するパーツであることを特徴とする請求項7に記載のコンピュータプログラム。
【請求項9】
前記取得手段は、前記撮像画像の各画素についての前記距離情報として、深度情報を示すグレースケールの深度マップを取得することを特徴とする請求項1に記載のコンピュータプログラム。
【請求項10】
前記認識手段は、さらに、前記所定の模型に含まれる各パーツの姿勢及び前記撮像手段からの距離に関する情報を認識し、前記所定の模型の基準姿勢を示す基準ボーン構造を含む三次元データを、認識した各パーツに従って更新し、更新した前記三次元データに基づいて前記所定の模型の姿勢を認識することを特徴とする請求項1に記載のコンピュータプログラム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、コンピュータプログラム、情報処理端末、及びその制御方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来より、現実空間に文字やCGなどの情報を重畳させてユーザに提示することで、拡張された現実空間を該ユーザに提示するAR(Augmented Reality)などのXR(Cross Reality)技術が様々な分野で利用されている。例えば、特許文献1には、フィギュアの台座に設けられたマークを携帯端末のカメラで認識して、マークに対応付けて用意された演出用の映像等を生成し、携帯端末の画面にフィギュアと映像とを重ね合わせて表示する拡張現実感システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第5551205号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、フィギュア画像と演出用の映像とを重ね合わせて表示しており、フィギュア画像と演出用の映像とが重複する位置ではフィギュア画像が隠れるようになっている。つまり、上記従来技術では、演出用の映像全てをフィギュア画像の前面に表示している。しかし、立体感や臨場感を出すには、演出用の映像など撮像画像に重ね合わせるオブジェクトは、当該フィギュアとの位置関係に応じてフィギュアの前面に露出したり、背面に隠れたりすることが望ましい。また、撮像した映像にリアルタイムでオブジェクトを付加するために、それらの処理負荷をできる限り低減させる必要がある。
【0005】
本発明は例えば、現実空間の撮像画像に好適にオブジェクトを合成して出力する仕組みを提供する。
【課題を解決するための手段】
【0006】
本発明は、例えば、コンピュータプログラムであって、情報処理端末のコンピュータを、所定の模型を含む周辺環境を撮像する撮像手段と、前記撮像手段によって撮像された撮像画像の各画素について、前記撮像手段からの距離情報を取得する取得手段と、前記撮像画像に含まれる前記所定の模型の少なくとも1つのパーツの姿勢及び前記撮像手段からの距離に関する情報を認識する認識手段と、前記認識手段によって認識した前記少なくとも1つのパーツを基準に、生成するオブジェクトの位置情報を決定する位置決定手段と、前記生成するオブジェクトの各画素のうち、それぞれの位置情報が前記撮像画像の対応する画素の距離情報よりも前記撮像手段に近いことを示す画素をオブジェクトとして描画し、オブジェクト画像を生成するオブジェクト生成手段と、前記撮像画像に前記オブジェクト画像を重畳した合成画像を表示部に出力する出力手段と、として機能させることを特徴とする。
【0007】
また、本発明は、例えば、情報処理端末であって、所定の模型を含む周辺環境を撮像する撮像手段と、前記撮像手段によって撮像された撮像画像の各画素について、前記撮像手段からの距離情報を取得する取得手段と、前記撮像画像に含まれる前記所定の模型の少なくとも1つのパーツの姿勢及び前記撮像手段からの距離に関する情報を認識する認識手段と、前記認識手段によって認識した前記少なくとも1つのパーツを基準に、生成するオブジェクトの位置情報を決定する位置決定手段と、前記生成するオブジェクトの各画素のうち、それぞれの位置情報が前記撮像画像の対応する画素の距離情報よりも前記撮像手段に近いことを示す画素をオブジェクトとして描画し、オブジェクト画像を生成するオブジェクト生成手段と、前記撮像画像に前記オブジェクト画像を重畳した合成画像を表示部に出力する出力手段とを備えることを特徴とする。
【0008】
また、本発明は、例えば、情報処理端末の制御方法であって、所定の模型を含む周辺環境を撮像手段によって撮像する撮像工程と、前記撮像工程で撮像された撮像画像の各画素について、前記撮像手段からの距離情報を取得する取得工程と、前記撮像画像に含まれる前記所定の模型の少なくとも1つのパーツの姿勢及び前記撮像手段からの距離に関する情報を認識する認識工程と、前記認識工程で認識した前記少なくとも1つのパーツを基準に、生成するオブジェクトの位置情報を決定する位置決定工程と、前記生成するオブジェクトの各画素のうち、それぞれの位置情報が前記撮像画像の対応する画素の距離情報よりも前記撮像手段に近いことを示す画素をオブジェクトとして描画し、オブジェクト画像を生成するオブジェクト生成工程と、前記撮像画像に前記オブジェクト画像を重畳した合成画像を表示部に出力する出力工程とを含むことを特徴とする。
【発明の効果】
【0009】
本発明によれば例えば、現実空間の撮像画像に好適にオブジェクトを合成して出力することができる。
【図面の簡単な説明】
【0010】
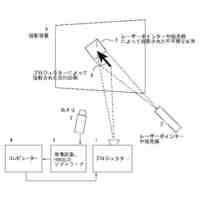
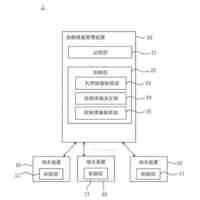
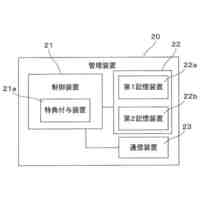
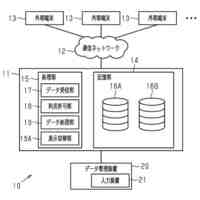
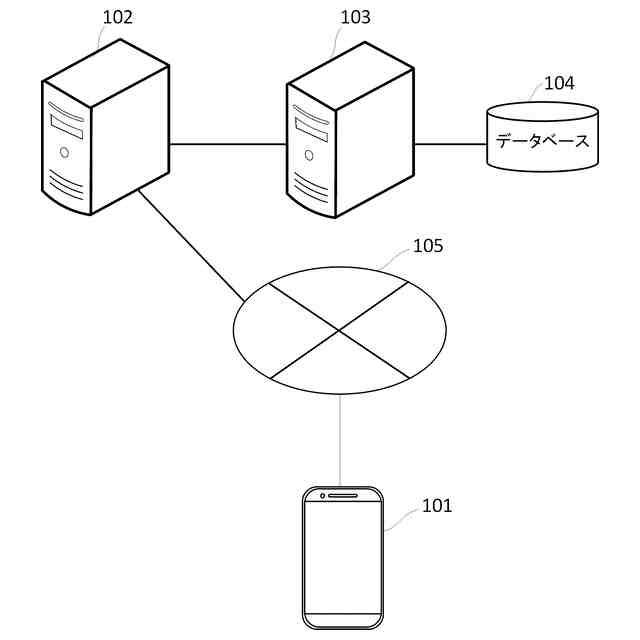
一実施形態に係るシステムの構成例を示す図。
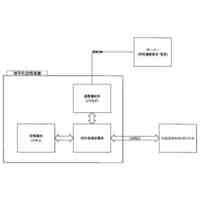
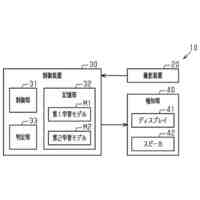
一実施形態に係る情報処理端末の構成例を示す図。
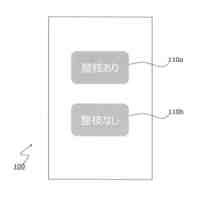
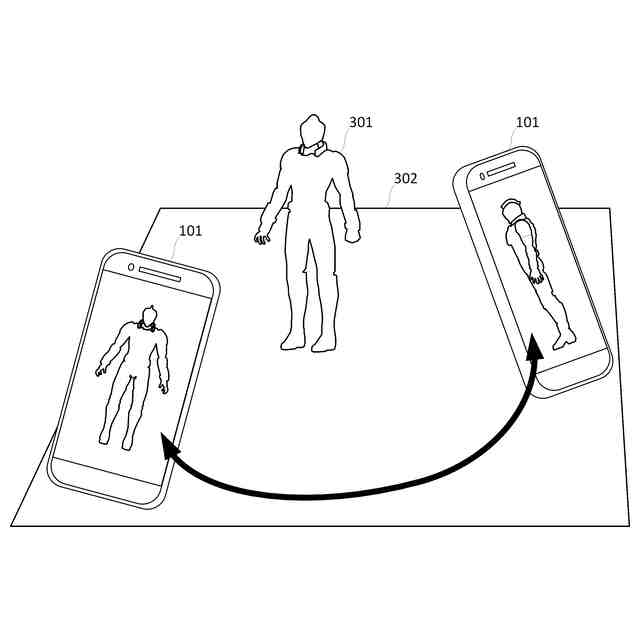
一実施形態に係るシステムが提供するXRギミックの一例を示す図。
一実施形態に係るXRギミックの画面遷移を示す図。
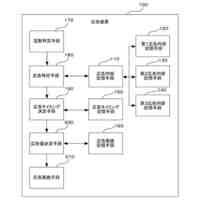
一実施形態に係るエフェクト合成に関する機能構成を示す図。
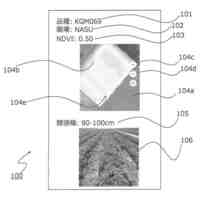
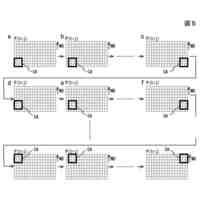
一実施形態に係るエフェクト合成の処理手順に応じた一連の画像例を示す図。
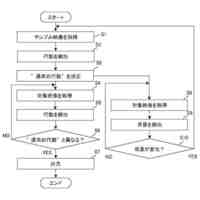
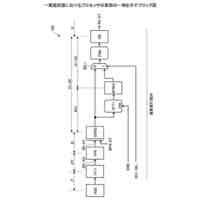
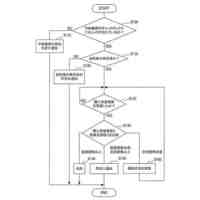
一実施形態に係る基本制御の処理手順を示すフローチャート。
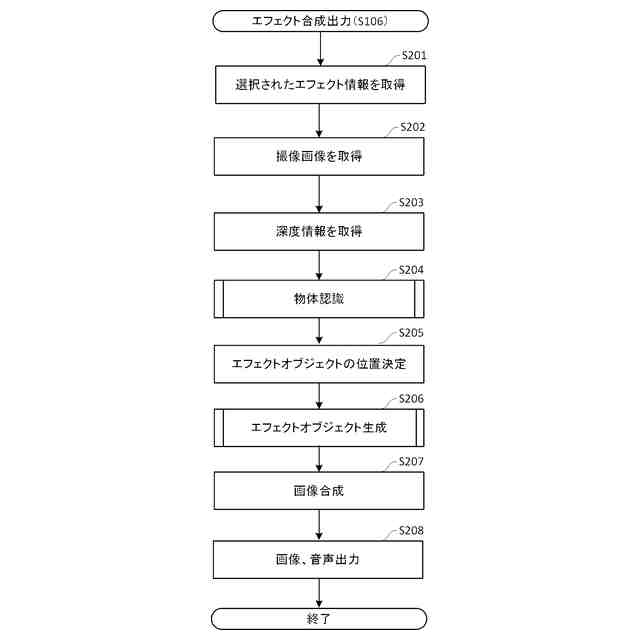
一実施形態に係るエフェクト合成出力の処理手順を示すフローチャート。
一実施形態に係る物体認識の処理手順を示すフローチャート。
一実施形態に係るオブジェクト生成の処理手順を示すフローチャート。
一実施形態に係るボーン構造の生成方法を示す図。
一実施形態に係る物体認識の処理手順を示すフローチャート。
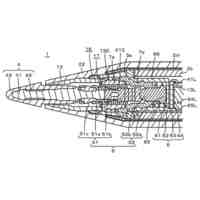
一実施形態に係るフィギュアの変形例を示す図。
【発明を実施するための形態】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
プロジェクター
1か月前
個人
暗号化記憶媒体
24日前
個人
管理装置
1か月前
個人
求人支援システム
13日前
キヤノン電子株式会社
周辺機器
1か月前
個人
求人マッチングサーバ
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
カゴメ株式会社
営農支援プログラム
1か月前
トヨタ自動車株式会社
検査装置
1か月前
株式会社ワコム
電子ペン
27日前
アスエネ株式会社
水管理の方法
1か月前
株式会社ワコム
電子ペン
25日前
シャープ株式会社
情報出力装置
11日前
大日本印刷株式会社
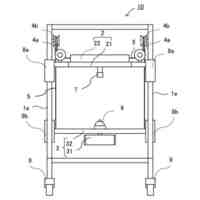
作業台
1か月前
CKD株式会社
遠隔支援システム
1か月前
株式会社NGA
画像投稿システム
1か月前
株式会社寺岡精工
システム
27日前
日本信号株式会社
料金精算システム
9日前
個人
ポイント増量アプリ「太陽光銭サー」
1か月前
株式会社カロニマ
情報発信システム
3日前
トヨタ紡織株式会社
検査装置
20日前
個人
言語翻訳システム及びプログラム
1か月前
株式会社アジラ
異常行動検出システム
20日前
BH株式会社
商品販売システム
1か月前
株式会社小野測器
移動量計測システム
1か月前
株式会社三富
取引管理システム
1か月前
株式会社小野測器
移動量計測システム
1か月前
個人
スマートフォンにおける使用料金削減方法
10日前
旭化成株式会社
装置
1か月前
富士通株式会社
プロセッサ
1か月前
株式会社mov
情報処理システム
19日前
シーアンドアールエム株式会社
広告装置
6日前
個人
AI営業システム
23日前
個人
特許審査支援ボットおよびボットシステム
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ