TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024070614
公報種別
公開特許公報(A)
公開日
2024-05-23
出願番号
2022181226
出願日
2022-11-11
発明の名称
自動墨出しシステム及び自動墨出し方法
出願人
鹿島建設株式会社
,
株式会社タマディック
,
株式会社ROBOSHIN
代理人
弁理士法人後藤特許事務所
主分類
G01C
15/02 20060101AFI20240516BHJP(測定;試験)
要約
【課題】墨出し面に自動的に墨出しを行う。
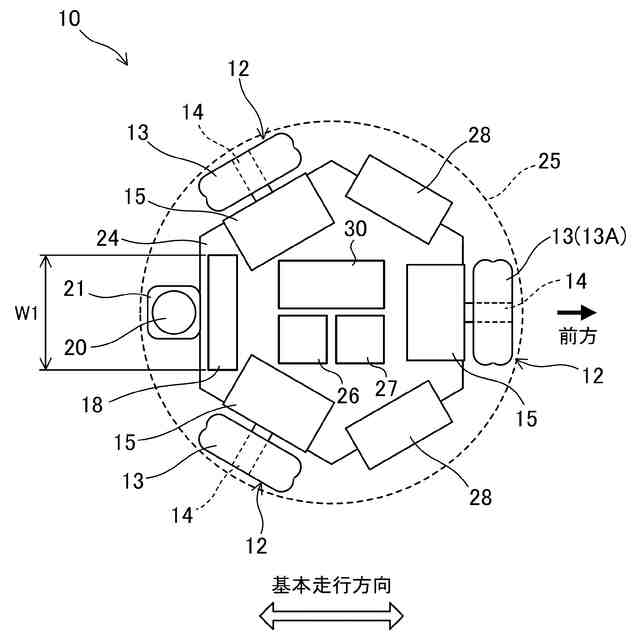
【解決手段】移動しながら墨出しを行う墨出し装置10と、墨出し装置10の三次元空間位置を計測可能な三次元計測装置50と、墨出し装置10の走行及び墨出しを制御する制御装置30と、を備えた自動墨出しシステム100において、墨出し装置10は、墨出し面上を走行可能な走行部12と、墨出し面に墨出しを行う墨出し部18と、三次元計測装置50により追尾されるターゲット部20と、を有し、走行部12は、回転方向及び回転速度がそれぞれ独立して制御される複数の全方向移動車輪を有し、制御装置30は、墨出し装置10の向きを変えることなく予め設定された目標墨出し位置に墨出し部18が位置するように、複数の全方向移動車輪の回転をそれぞれ制御する。
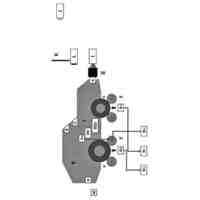
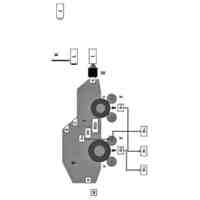
【選択図】図7
特許請求の範囲
【請求項1】
移動しながら墨出し面に墨出しを行う墨出し装置と、前記墨出し装置を追尾し前記墨出し装置の三次元空間位置を計測可能な三次元計測装置と、前記三次元計測装置により計測された前記墨出し装置の三次元空間位置に基づいて前記墨出し装置の走行及び墨出しを制御する制御装置と、を備えた自動墨出しシステムであって、
前記墨出し装置は、
前記墨出し面上を走行可能な走行部と、
前記墨出し面に墨出しを行う墨出し部と、
前記三次元計測装置により追尾されるターゲット部と、を有し、
前記走行部は、回転方向及び回転速度がそれぞれ独立して制御される複数の全方向移動車輪を有し、
前記制御装置は、前記墨出し装置の向きを変えることなく予め設定された目標墨出し位置に前記墨出し部が位置するように、複数の前記全方向移動車輪の回転をそれぞれ制御する、
自動墨出しシステム。
続きを表示(約 1,500 文字)
【請求項2】
前記制御装置は、前記目標墨出し位置に対する前記墨出し装置の位置の調整を、複数の前記全方向移動車輪の回転方向を変えることなく回転速度を変えることによって行う、
請求項1に記載の自動墨出しシステム。
【請求項3】
複数の前記全方向移動車輪は、各車軸の軸方向が共通の中心点を向くように配置された3つのオムニホイールである、
請求項1または2に記載の自動墨出しシステム。
【請求項4】
前記三次元計測装置は、
前記ターゲット部までの距離を光学的に計測する光学計測部と、
前記墨出し面上を移動可能な台車部と、を有し、
前記制御装置は、前記光学計測部と前記ターゲット部との間に光を遮る部材が入り込まないように、前記台車部を制御して前記三次元計測装置を移動させる、
請求項1または2に記載の自動墨出しシステム。
【請求項5】
前記制御装置は、設計データから描画データを生成する描画データ生成部を有し、
前記描画データ生成部は、前記設計データに折れ線が含まれている場合、折れ線を構成する2本の線分を折れ点においてそれぞれ延長し、前記折れ点を前記2本の線分が交差する交点に変換する、
請求項1または2に記載の自動墨出しシステム。
【請求項6】
前記制御装置は、
設計データから描画データを生成する描画データ生成部と、
前記描画データに基づいて前記目標墨出し位置を設定する墨出し位置設定部と、を有し、
前記描画データ生成部は、
前記三次元計測装置により計測された前記ターゲット部の位置と前記描画データに基づいて予め求められた前記ターゲット部の目標位置との差分に応じて前記描画データをオフセットし、
前記墨出し位置設定部は、オフセットされた前記描画データに基づいて前記目標墨出し位置を設定する、
請求項1または2に記載の自動墨出しシステム。
【請求項7】
前記制御装置は、前記墨出し装置の姿勢を認識する姿勢認識部を有し、
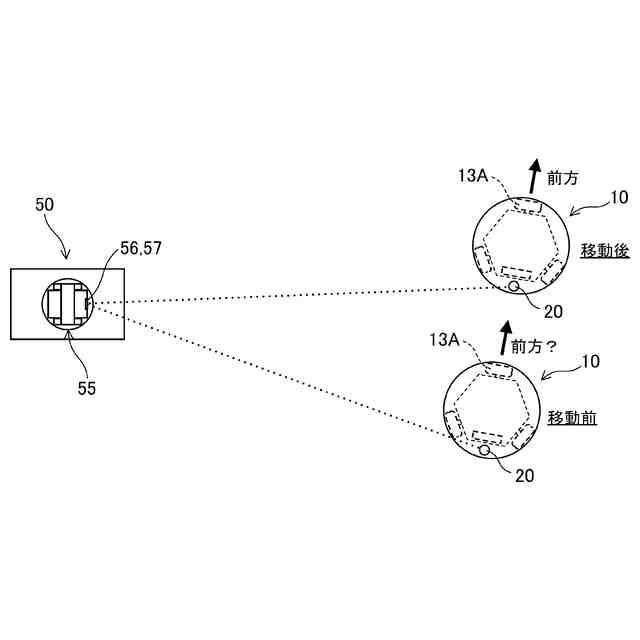
前記姿勢認識部は、前記三次元計測装置により計測された前記ターゲット部の位置を受信した後、予め設定された方向へと前記墨出し装置を移動させ、移動前に受信した前記ターゲット部の位置と、移動後に受信した前記ターゲット部の位置と、に基づいて、前記墨出し装置の姿勢を認識する、
請求項1または2に記載の自動墨出しシステム。
【請求項8】
移動しながら墨出し面に墨出しを行う墨出し装置と、前記墨出し装置を追尾し前記墨出し装置の三次元空間位置を計測可能な三次元計測装置と、前記三次元計測装置により計測された前記墨出し装置の三次元空間位置に基づいて前記墨出し装置の走行及び墨出しを制御する制御装置と、を備えた自動墨出しシステムによる自動墨出し方法であって、
回転方向及び回転速度がそれぞれ独立して制御される複数の全方向移動車輪を有する前記墨出し装置の走行部を制御することにより、予め設定された目標墨出し位置に前記墨出し装置の墨出し部が位置するように、前記墨出し装置の向きを変えることなく前記墨出し装置を移動させる、
自動墨出し方法。
【請求項9】
前記目標墨出し位置に対する前記墨出し装置の位置の調整は、複数の前記全方向移動車輪の回転方向を変えることなく回転速度を変えることによって行われる、
請求項8に記載の自動墨出し方法。
【請求項10】
複数の前記全方向移動車輪は、各車軸の軸方向が共通の中心点を向くように配置された3つのオムニホイールである、
請求項8または9に記載の自動墨出し方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動墨出しシステム及び自動墨出し方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1には、墨出し面にマーキングを行う墨出しロボットを備えた自動墨出しシステムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-2849号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された自動墨出しシステムは、墨出しロボットを指定された目標点へと移動させて、目標点にスタンプを押してマーキングを作成するものである。このため、マーキング同士を結ぶ墨出し線については、別途、墨出し作業を作業員が行う必要があり、作業員の作業負担を十分に軽減するには至っていない。
【0005】
本発明は、墨出し面に自動的に墨出しを行うことが可能な自動墨出しシステムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、移動しながら墨出し面に墨出しを行う墨出し装置と、墨出し装置を追尾し墨出し装置の三次元空間位置を計測可能な三次元計測装置と、三次元計測装置により計測された墨出し装置の三次元空間位置に基づいて墨出し装置の走行及び墨出しを制御する制御装置と、を備えた自動墨出しシステムであって、墨出し装置は、墨出し面上を走行可能な走行部と、墨出し面に墨出しを行う墨出し部と、三次元計測装置により追尾されるターゲット部と、を有し、走行部は、回転方向及び回転速度がそれぞれ独立して制御される複数の全方向移動車輪を有し、制御装置は、墨出し装置の向きを変えることなく予め設定された目標墨出し位置に墨出し部が位置するように、複数の全方向移動車輪の回転をそれぞれ制御する。
【0007】
また、本発明は、移動しながら墨出し面に墨出しを行う墨出し装置と、墨出し装置を追尾し墨出し装置の三次元空間位置を計測可能な三次元計測装置と、三次元計測装置により計測された墨出し装置の三次元空間位置に基づいて墨出し装置の走行及び墨出しを制御する制御装置と、を備えた自動墨出しシステムによる自動墨出し方法であって、回転方向及び回転速度がそれぞれ独立して制御される複数の全方向移動車輪を有する墨出し装置の走行部を制御することにより、予め設定された目標墨出し位置に墨出し装置の墨出し部が位置するように、墨出し装置の向きを変えることなく墨出し装置を移動させる。
【発明の効果】
【0008】
本発明によれば、自動墨出しシステムによって、墨出し面に自動的に墨出しを行うことができる。
【図面の簡単な説明】
【0009】
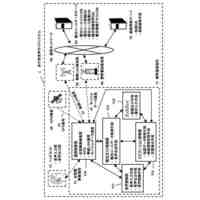
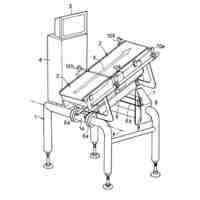
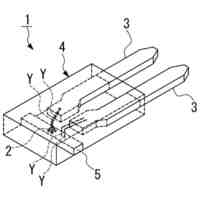
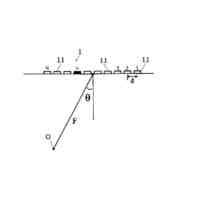
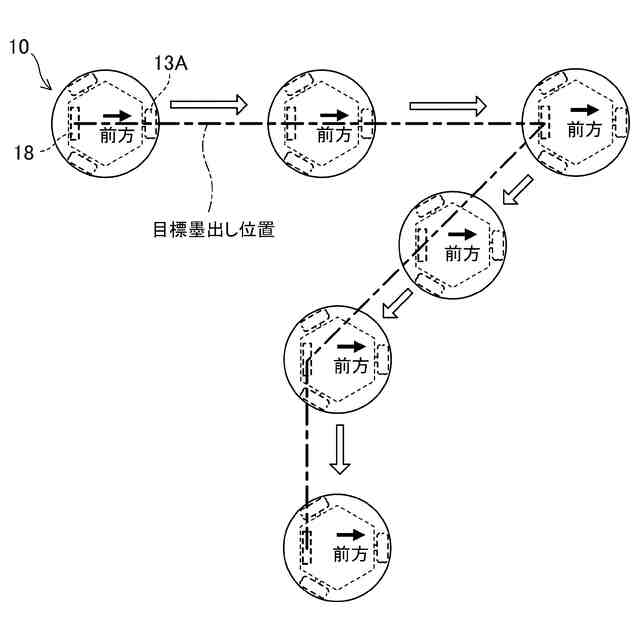
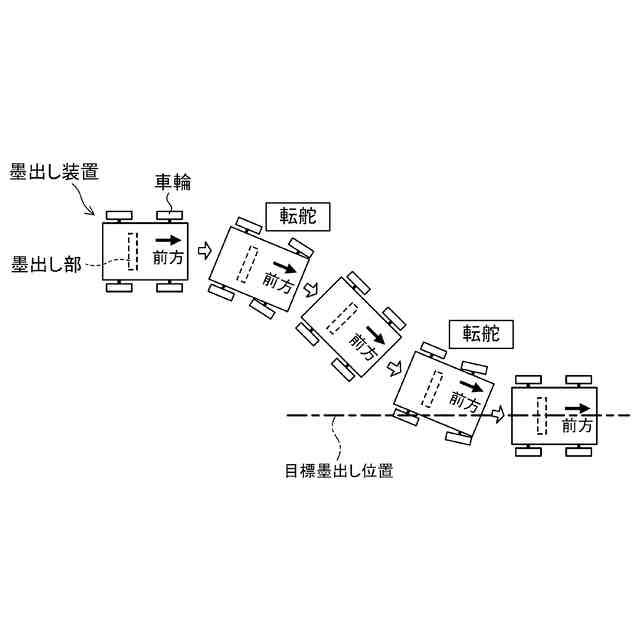
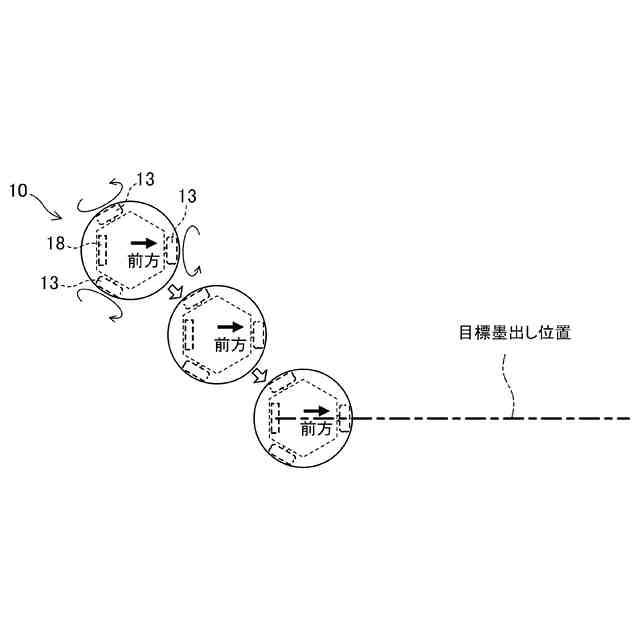
本発明の実施形態に係る自動墨出しシステムによって行われる墨出し作業のイメージを示したイメージ図である。
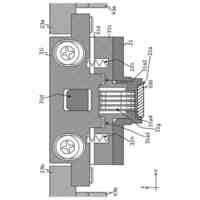
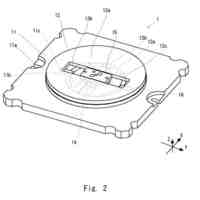
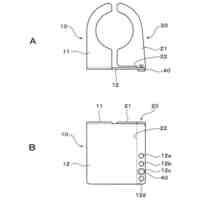
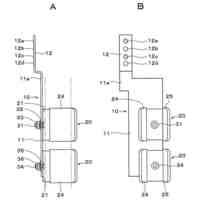
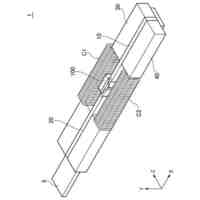
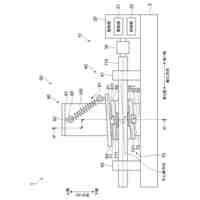
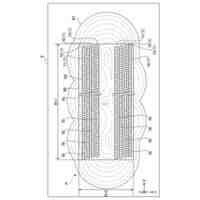
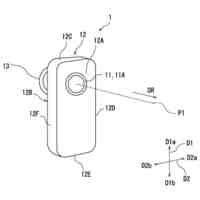
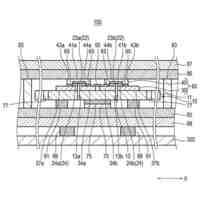
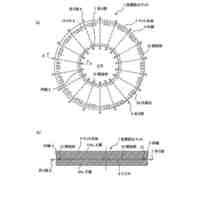
本発明の実施形態に係る自動墨出しシステムの墨出し装置の概略構成を示した平面図である。
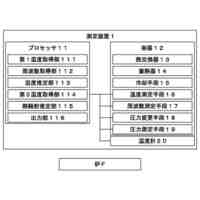
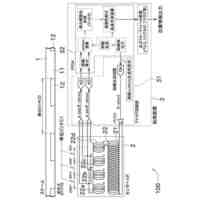
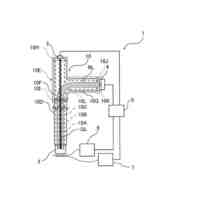
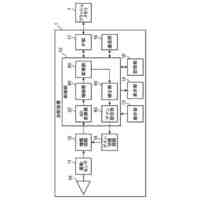
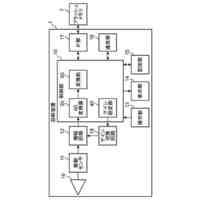
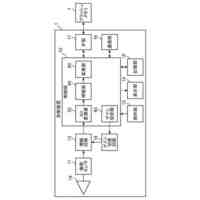
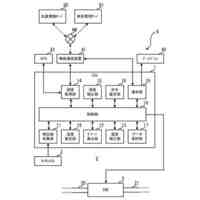
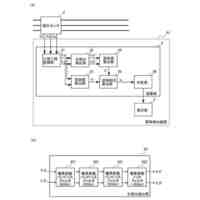
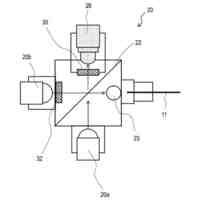
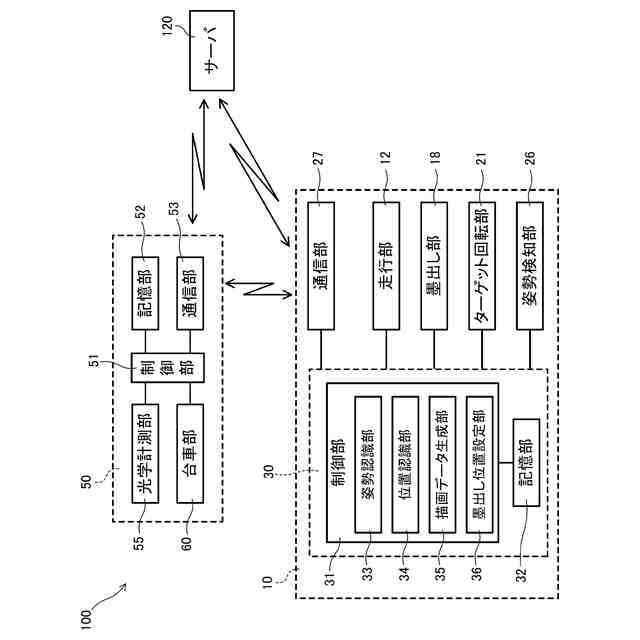
本発明の実施形態に係る自動墨出しシステムの全体構成を示すブロック図である。
描画データについて説明するための図である。
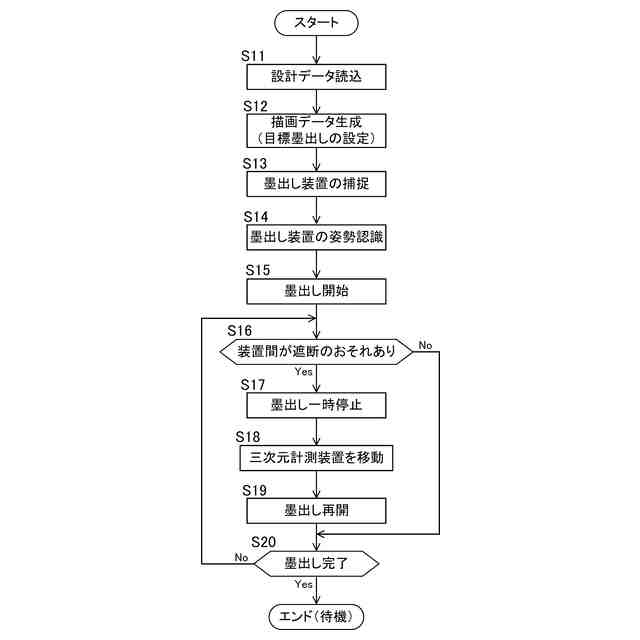
本発明の実施形態に係る自動墨出しシステムによって行われる墨出し作業の手順を示したフローチャートである。
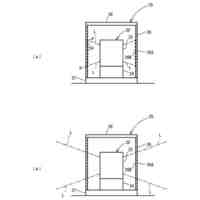
墨出し装置の姿勢認識方法について説明するための図である。
墨出しを行う際の墨出し装置の姿勢について説明するための図である。
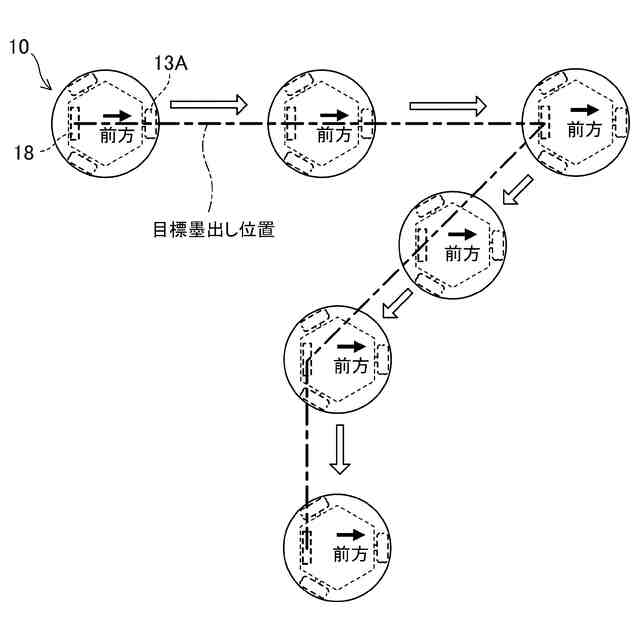
目標墨出し位置への墨出し装置の移動について説明するための図である。
目標墨出し位置への墨出し装置の移動について説明するための図である。
目標墨出し位置に対する墨出し装置の位置調整方法について説明するための図である。
目標墨出し位置に対する墨出し装置の位置調整方法について説明するための図である。
描画データのオフセットについて説明するための図である。
【発明を実施するための形態】
【0010】
以下、図面を参照して、本発明の実施形態に係る自動墨出しシステム及び自動墨出し方法について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
積水化学工業株式会社
立管ユニット用フレーム
11日前
鹿島建設株式会社
床版架け替え方法
16日前
鹿島建設株式会社
洗掘防止マットの設置方法、洗掘防止工の施工方法および洗掘防止マット
3日前
個人
歩行者音声ガイドシステム
9日前
株式会社ヨコオ
検査治具
10日前
株式会社豊田自動織機
無人走行体
13日前
昭電工業株式会社
測定装置
11日前
太陽誘電株式会社
検出装置
5日前
大和製衡株式会社
重量選別機
3日前
トヨタ自動車株式会社
測定治具
13日前
村田機械株式会社
変位検出装置
13日前
株式会社ニシヤマ
物品取付装置
6日前
矢崎総業株式会社
センサ
5日前
キーコム株式会社
試験システム
16日前
株式会社ニシヤマ
物品取付装置
6日前
キーコム株式会社
試験システム
16日前
TDK株式会社
磁気センサ
10日前
株式会社ミヤワキ
診断装置
23日前
大同特殊鋼株式会社
形状検出装置
5日前
株式会社ミヤワキ
診断装置
23日前
株式会社ミヤワキ
診断装置
23日前
日立Astemo株式会社
測定装置
20日前
三菱マテリアル株式会社
温度センサ
6日前
三菱マテリアル株式会社
温度センサ
20日前
大同特殊鋼株式会社
超音波探傷方法
20日前
トヨタ自動車株式会社
劣化推定装置
6日前
株式会社島津製作所
分析装置
5日前
株式会社ミツトヨ
光学式エンコーダ
11日前
オムロン株式会社
スイッチング装置
16日前
株式会社不二越
X線測定装置
13日前
コイズミ照明株式会社
検出ユニット
24日前
株式会社ダイヘン
異常検出装置
3日前
トヨタ自動車株式会社
空燃比算出装置
13日前
トヨタ自動車株式会社
電気機器
9日前
日本メクトロン株式会社
部品実装基板
16日前
株式会社フジキン
濃度測定装置
10日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ