TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024063750
公報種別
公開特許公報(A)
公開日
2024-05-13
出願番号
2023166696
出願日
2023-09-28
発明の名称
位置検出装置
出願人
株式会社プロテリアル
代理人
主分類
G01D
5/245 20060101AFI20240502BHJP(測定;試験)
要約
【課題】小型化及び軽量化が可能な位置検出装置を提供する。
【解決手段】ストロークセンサ1は、ラックシャフト13に沿って配置された励磁コイル300と、励磁コイル300が発生する磁界により、ラックシャフト13と共に移動する第1及び第2の被検出部21,22の位置に応じた電圧を出力する第1乃至第4の検出コイル31~34とを備える。ラックシャフト13の一方向への移動時において、第1乃至第4の検出コイル31~34と第1及び第2の被検出部21,22の少なくとも一部とがラックシャフト13の移動方向に対して垂直な方向に並び始めてから第1及び第2の被検出部21,22の全体が第1乃至第4の検出コイル31~34とラックシャフト13の移動方向に対して垂直な方向に並ばなくなるまでの間の全体にわたり、第1乃至第4の検出コイル31~34の出力電圧が正弦波状に変化する。
【選択図】図5
特許請求の範囲
【請求項1】
所定の移動方向に進退移動する移動部材の位置を検出する位置検出装置であって、
前記移動部材に沿って前記移動方向に延在して配置された励磁コイルと、
前記励磁コイルが発生する磁界により、前記移動方向における所定の検出範囲内において、前記移動部材と共に移動する被検出部の位置に応じた電圧を出力する検出コイルと、
前記検出コイルの出力電圧によって前記移動部材の位置を演算によって求める演算部と
を備え、
前記被検出部が前記移動方向に所定長さを有しており、前記被検出部に対応する部位と対応しない部位との磁界の強度の差によって前記検出コイルに電圧が発生し、
前記移動部材の一方向への移動時において、前記検出コイルと前記被検出部の少なくとも一部とが前記移動方向に垂直な方向に並び始めてから前記被検出部の全体が前記検出コイルと前記移動方向に垂直な方向に並ばなくなるまでの間の全体にわたり、前記検出コイルの出力電圧が正弦波状に変化する、
位置検出装置。
続きを表示(約 1,200 文字)
【請求項2】
前記検出コイルは、前記励磁コイルの延在方向に対して垂直なコイル幅方向に間隔をあけて設けられた二つのコイル導体部を有し、前記二つのコイル導体部の間隔が前記検出コイルの両端部において極小となると共に、前記二つのコイル導体部が交差する交差部と、前記コイル幅方向における前記二つのコイル導体部の間隔が極大となる極大部とを有し、
前記二つのコイル導体部は、前記検出コイルの端部から前記極大部までの間における前記移動方向に対する傾きが、前記極大部と前記交差部との間における前記移動方向に対する傾きよりも大きい、
請求項1に記載の位置検出装置。
【請求項3】
前記検出コイルは、前記励磁コイルの延在方向に対して垂直なコイル幅方向に間隔をあけて設けられた二つのコイル導体部を有し、
前記二つのコイル導体部のそれぞれは、前記移動方向に対して垂直な方向に直線状に延びる複数の線分部と、前記移動方向に対して傾斜して前記複数の線分部のそれぞれの端部同士を接続する傾斜部とによって形成されている、
請求項1に記載の位置検出装置。
【請求項4】
前記移動方向における前記複数の線分部の間隔が、前記被検出部の前記所定長さに対応する間隔である、
請求項3に記載の位置検出装置。
【請求項5】
複数の前記検出コイルが前記励磁コイルの延在方向にオフセットして配置された、
請求項2乃至4の何れか1項に記載の位置検出装置。
【請求項6】
複数の前記検出コイルを組み合わせてなる第1及び第2の検出コイル組を有し、
前記第1及び第2の検出コイル組が前記励磁コイルの延在方向に対して垂直な方向に並び、
前記第1及び第2の検出コイル組のそれぞれは、複数の前記検出コイルが前記励磁コイルの延在方向にオフセットして配置されている、
請求項2乃至4の何れか1項に記載の位置検出装置。
【請求項7】
前記第1の検出コイル組を構成する複数の前記検出コイルの前記励磁コイルの延在方向における長さと、前記第2の検出コイル組を構成する複数の前記検出コイルの前記励磁コイルの延在方向における長さとが異なる、
請求項6に記載の位置検出装置。
【請求項8】
前記第1の検出コイル組に対応して複数の前記被検出部が設けられ、
前記第2の検出コイル組に対応して複数の前記被検出部が設けられている、
請求項7に記載の位置検出装置。
【請求項9】
複数の前記検出コイルが1枚の基板に形成されており、
前記励磁コイルは、複数の前記検出コイルを囲むように前記基板に形成されている、
請求項8に記載の位置検出装置。
【請求項10】
前記移動部材に取り付けられた導電性部材を有し、
前記導電性部材に前記被検出部が形成されている、
請求項1に記載の位置検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、所定の移動方向に進退移動する移動部材の位置を検出する位置検出装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、所定の移動方向に進退移動する移動部材の位置を検出する位置検出装置が、産業機械や自動車等の様々な分野で用いられている。
【0003】
特許文献1に記載された電磁誘導式リニアスケールは、第1の交流信号で励磁される所定数のコイル素子からなるコイルアレイと、コイルアレイの外方をその軸に沿って相対変位する磁気部材と、各コイル素子の出力電圧からコイルアレイに対する磁気部材の位置を検出する検出部とを有している。磁気部材は、コイル素子との位置関係に応じてコイル素子の出力電圧の振幅を変化させる。検出部は、コイル素子間の差動出力を合成して得た第2の交流信号と第1の交流信号との位相差から、コイルアレイに対する磁気部材の相対位置をアブソリュートに検出する。
【先行技術文献】
【特許文献】
【0004】
特開2009-2770号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された電磁誘導式リニアスケールでは、磁気部材の移動範囲の全体にわたって多数のコイル素子を並べて配置しなければならず、設置サイズ及び重量が増大してしまう。そこで、本発明は、小型化及び軽量化が可能な位置検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上記課題を解決することを目的として、所定の移動方向に進退移動する移動部材の位置を検出する位置検出装置であって、前記移動部材に沿って前記移動方向に延在して配置された励磁コイルと、前記励磁コイルが発生する磁界により、前記移動方向における所定の検出範囲内において、前記移動部材と共に移動する被検出部の位置に応じた電圧を出力する検出コイルと、前記検出コイルの出力電圧によって前記移動部材の位置を演算によって求める演算部とを備え、前記被検出部が前記移動方向に所定長さを有しており、前記被検出部に対応する部位と対応しない部位との磁界の強度の差によって前記検出コイルに電圧が発生し、前記移動部材の一方向への移動時において、前記検出コイルと前記被検出部の少なくとも一部とが前記移動方向に垂直な方向に並び始めてから前記被検出部の全体が前記検出コイルと前記移動方向に垂直な方向に並ばなくなるまでの間の全体にわたり、前記検出コイルの出力電圧が正弦波状に変化する、位置検出装置を提供する。
【発明の効果】
【0007】
本発明によれば、位置検出装置の小型化及び軽量化が可能となる。
【図面の簡単な説明】
【0008】
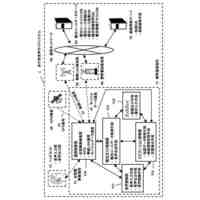
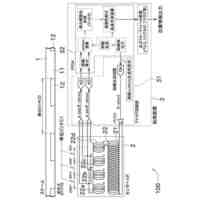
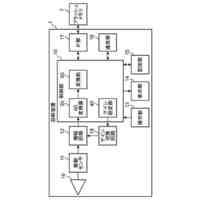
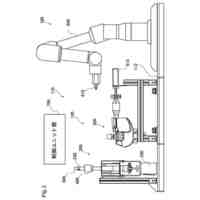
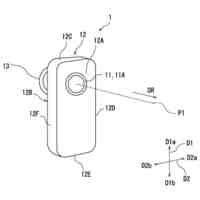
本発明の実施の形態に係る位置検出装置としてのストロークセンサを備えたステアバイワイヤ式のステアリング装置が搭載された車両の模式図である。
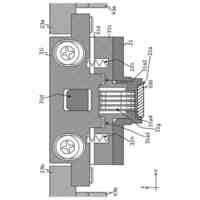
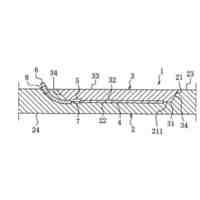
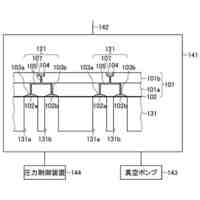
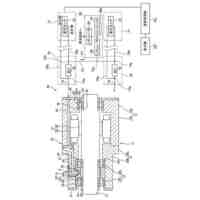
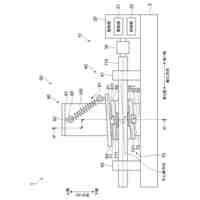
図1のA-A線断面図である
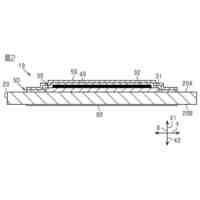
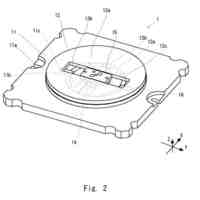
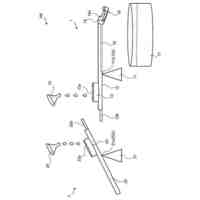
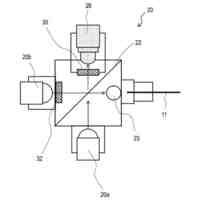
図3は、基板、CPU、ケース部材、ラックシャフト、及びハウジングの一部を示す斜視図である。
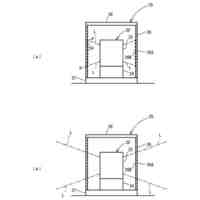
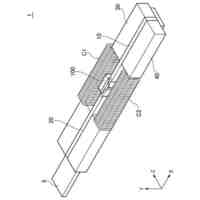
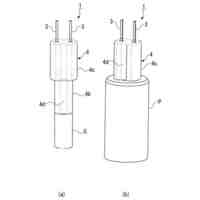
(a)は、ターゲットを示す斜視図であり、(b)は、ターゲットの平面図である。
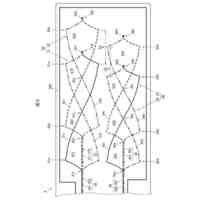
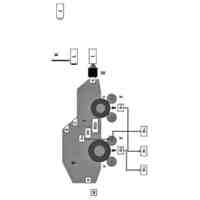
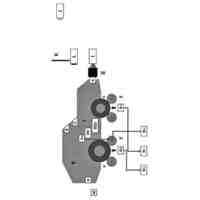
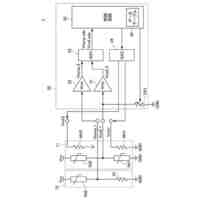
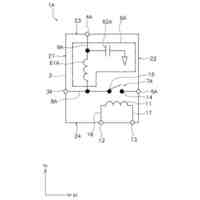
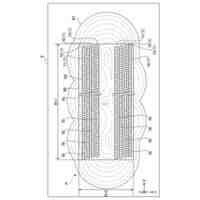
基板の第1乃至第4の金属層に形成された配線パターンを裏面側から透視して見た説明図である。
(a)~(d)は、裏面側から見た第1乃至第4の金属層をそれぞれ示す平面図である。
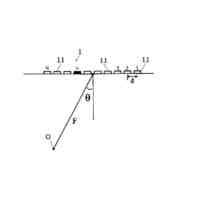
第1の検出コイルをターゲットの二つの第1の被検出部と共に示す説明図である。
電源部から励磁コイルに供給される供給電圧と第1の検出コイルの出力電圧との関係の一例を示すグラフである。
ラックシャフトが一方向に一定の速度で移動する場合において、励磁コイルに供給される供給電圧の1周期内における第1の検出コイルのピーク電圧と、供給電圧の1周期内における第2の検出コイルのピーク電圧との関係を示すグラフである。
CPUがラックシャフトの位置を求めるために行う演算処理の一例を示すフローチャートである。
式(1)及び式(2)によって求められるラックシャフトの位置と、式(3)又は(4)によって求められるラックシャフトの位置との関係を示すグラフである。
比較例に係る検出コイル組の構成例をターゲットの二つの第1の被検出部と共に示す説明図である。
第1の検出コイルの出力電圧に基づいて式(1)により求められるラックシャフトの位置と、比較例に係る検出コイル組の出力電圧に基づいて式(1)と同様の演算式により求められるラックシャフトの位置との算出結果を比較して示すグラフである。
変形例1に係る検出コイルを、この検出コイルに組み合わされるターゲットと共に示す説明図である。
図14に示す構成の検出コイルを用いて第1の検出コイル組及び第2の検出コイル組を構成した構成例を示す構成図である。
変形例2に係る検出コイルを、この検出コイルに組み合わされるターゲットと共に示す説明図である。
変形例3に係る検出コイルを、この検出コイルに組み合わされるターゲットと共に示す説明図である。
変形例4に係る検出コイルを、この検出コイルに組み合わされるターゲットと共に示す説明図である。
【発明を実施するための形態】
【0009】
[実施の形態]
図1は、本発明の実施の形態に係る位置検出装置としてのストロークセンサ1を備えたステアバイワイヤ式のステアリング装置10が搭載された車両の模式図である。この図1では、ステアリング装置10を車両前後方向の後方側から見た状態を示しており、図面右側が車幅方向の右側にあたり、図面左側が車幅方向の左側にあたる。なお、以下の図面を参照した説明において、「右」又は「左」という場合があるが、この表現は説明の便宜上用いられるものであり、ストロークセンサ1の実使用状態における配置の方向を限定するものではない。
【0010】
図1に示すように、ステアリング装置10は、ストロークセンサ1と、転舵輪11(左右の前輪)に連結されたタイロッド12と、タイロッド12に連結されたラックシャフト13と、ラックシャフト13を収容する筒状のハウジング14と、ラックシャフト13のラック歯131に噛み合わされたピニオンギヤ151を有するウォーム減速機構15と、ウォーム減速機構15を介してラックシャフト13に車幅方向の移動力を付与する電動モータ16と、運転者が操舵操作するステアリングホイール17と、ステアリングホイール17の操舵角を検出する操舵角センサ18と、操舵角センサ18によって検出された操舵角に基づいて電動モータ16を制御する操舵制御装置19とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
歩行者音声ガイドシステム
今日
株式会社ヨコオ
検査治具
1日前
太陽誘電株式会社
検出装置
23日前
昭電工業株式会社
測定装置
2日前
太陽誘電株式会社
検出装置
22日前
株式会社豊田自動織機
無人走行体
4日前
株式会社プロテリアル
位置検出装置
25日前
日本碍子株式会社
ガスセンサ
25日前
村田機械株式会社
変位検出装置
4日前
株式会社ヨコオ
プローブ
24日前
株式会社村田製作所
変位センサ
24日前
三恵技研工業株式会社
レドーム
21日前
株式会社クボタ
検査装置
23日前
株式会社クボタ
検査装置
23日前
トヨタ自動車株式会社
測定治具
4日前
キーコム株式会社
試験システム
7日前
キーコム株式会社
試験システム
7日前
アズビル株式会社
オイル封入方法
21日前
TDK株式会社
ガスセンサ
21日前
日本精工株式会社
軸受装置
22日前
株式会社シンカグループ
計測装置
18日前
TDK株式会社
磁気センサ
1日前
株式会社ミヤワキ
診断装置
14日前
株式会社ミヤワキ
診断装置
14日前
TDK株式会社
ガスセンサ
21日前
株式会社ミヤワキ
診断装置
14日前
三菱マテリアル株式会社
温度センサ
11日前
株式会社ミツトヨ
自動内径測定装置
21日前
オムロン株式会社
スイッチング装置
7日前
日立Astemo株式会社
測定装置
11日前
株式会社不二越
X線測定装置
4日前
コイズミ照明株式会社
検出ユニット
15日前
三菱マテリアル株式会社
温度センサ
18日前
株式会社ミツトヨ
光学式エンコーダ
2日前
大同特殊鋼株式会社
超音波探傷方法
11日前
株式会社フジキン
濃度測定装置
1日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ