TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024058946
公報種別
公開特許公報(A)
公開日
2024-04-30
出願番号
2022166378
出願日
2022-10-17
発明の名称
量子駆動制御部を備えたアクチュエータ
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
H02N
2/06 20060101AFI20240422BHJP(電力の発電,変換,配電)
要約
【課題】 非線形特性を有するアクチュエータの制御性向上を目的とする。
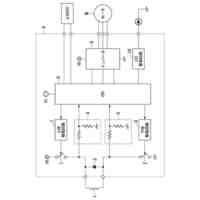
【解決手段】 上記課題を解決する本発明のアクチュエータは、第一の部材と、前記第一の部材が駆動することで動作する第二の部材と、前記第二の部材の状態を計測する計測部と、指令部が発する指令が指示する目標状態および計測された前記状態に基づく信号を入力とし、量子演算により前記第一の部材を駆動する制御量を出力する量子駆動制御部、を備えたアクチュエータであって、前記制御量を入力として前記第一の部材が駆動することで前記第二の部材が動作する。
【選択図】 図1
特許請求の範囲
【請求項1】
第一の部材と、
前記第一の部材が駆動することで動作する第二の部材と、
前記第二の部材の状態を計測する計測部と、
指令部が発する指令が指示する目標状態および計測された前記状態に基づく信号を入力とし、量子演算により前記第一の部材を駆動する制御量を出力する量子駆動制御部、
を備えたアクチュエータであって、
前記制御量を入力として前記第一の部材が駆動することで前記第二の部材が動作するアクチュエータ。
続きを表示(約 920 文字)
【請求項2】
前記量子駆動制御部は、量子ビットを用いた量子ゲート演算に基づき前記制御量を出力する請求項1に記載のアクチュエータ。
【請求項3】
前記量子駆動制御部は、前記目標状態における前記第二の部材の目標速度を入力とし前記制御量を出力する請求項1又は2に記載のアクチュエータ。
【請求項4】
前記量子駆動制御部は、前記目標状態における前記第二の部材の目標位置と前記計測部により計測された前記第二の部材の位置との偏差に基づく信号を入力として、前記制御量を出力する請求項1又は2に記載のアクチュエータ。
【請求項5】
前記量子駆動制御部は、前記目標状態における前記第二の部材の目標速度と前記計測部により計測された前記第二の部材の速度との偏差に基づく信号を入力とし、前記制御量を出力する請求項1又は2に記載のアクチュエータ。
【請求項6】
前記量子駆動制御部は、前記目標状態に基づいて前記量子ビットが読みだされる確率に関連付けられた制御量を出力する請求項2に記載のアクチュエータ。
【請求項7】
前記量子駆動制御部は、前記量子ゲート演算に基づく前記確率に対応した出力テーブルを備えた請求項6に記載のアクチュエータ。
【請求項8】
前記量子駆動制御部は、前記目標状態を入力とし、前記量子ゲート演算に基づく演算結果を所定の近似式によって近似し、前記近似式に基づき前記制御量を出力する近似式演算部を備えた請求項2に記載のアクチュエータ。
【請求項9】
前記量子駆動制御部は、外部サーバーと接続可能な通信部を備え、
前記外部サーバーを通じて量子コンピュータを用いた前記量子ゲート演算を実行する請求項2に記載のアクチュエータ。
【請求項10】
前記量子駆動制御部は、メモリを備え、
2進法演算によるコンピュータが外部サーバーを通じて量子コンピュータを用いて前記量子ゲート演算を実行し、演算結果の情報を前記メモリに書き込まれるよう構成された請求項2に記載のアクチュエータ。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、量子駆動制御部を備えたアクチュエータに関するものである。より詳しくは量子ビットを用いた量子ゲート演算に基づく制御によって動作するアクチュエータに関するものである。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
AI(人工知能)に続く次世代技術として、近年は量子コンピューティング技術の研究が進められている(特許文献2、3、4)。量子コンピューティング技術は、従来の2進法演算による古典コンピュータに対して大幅な演算時間の短縮が期待される有望な技術である。具体的な応用先としては、金融や材料計算、データマイニング分野などが研究されているが、量子演算の特徴を活かし、より広範囲に、例えばアクチュエータの制御といった分野にも適用できる可能性を秘めている。
【0003】
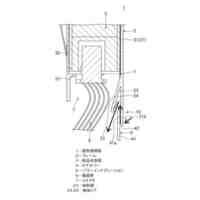
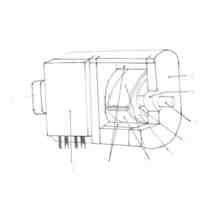
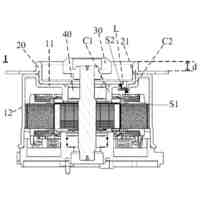
アクチュエータの一例として振動型アクチュエータについて説明する。振動型アクチュエータは、弾性体に結合された、圧電素子等の電気-機械エネルギー変換素子に交流電圧を印加することで、該素子に高周波振動を発生させ、その振動エネルギーを連続的な機械運動として取り出すように構成された、非電磁駆動式のモータである。
【0004】
振動型アクチュエータは小型軽量、高精度、低速高トルクといった優れたモータ性能を有する一方で、非線形のモータ特性を有しているのでモデル化は難しく、駆動条件や温度環境で制御性が変化するので制御的な対策が必要となる。また、周波数、位相差、電圧といった制御パラメータも多く、調整も複雑となる。
【0005】
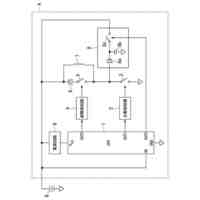
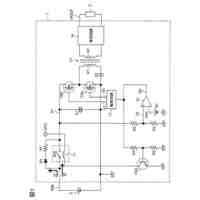
図12(a)は、従来の一般的なPID制御による振動型アクチュエータを示す例である。駆動回路からは2相の交流電圧信号が出力され、その周波数、位相差、電圧振幅(パルス幅により可変)を制御することで振動型モータの速度を制御することができる(図12b)。目標位置と、検出された相対位置との差分である位置偏差はPID制御器に入力され、位置偏差に応じてPID演算された制御量(周波数、位相差、パルス幅)が制御サンプリング毎に逐次出力されることで位置フィードバック制御が行われる。
【0006】
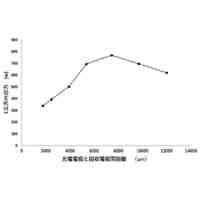
図12(c)は、従来の一般的なPID制御による振動型アクチュエータの周波数‐速度特性を模式的に示した図である。振動型アクチュエータは使用する速度域によって速度カーブの傾きが異なり、制御ゲインの調整が必要となる。例えば高速域の周波数f1と、低速域の周波数f2で傾きが異なる様子を示す。図12(d)は、前述の低速域(f2)と高速域(f1)での位相差‐速度特性を比較した図である。高速域(実線で示されたカーブのf1近傍の周波数帯)は傾きが大きいので制御的な敏感度が高く、低速域(実線で示されたカーブのf2近傍の周波数帯)は傾きが小さいので敏感度も低い。また、環境温度による変化、例えば常温から低温に変化した場合は圧電素子の温度特性に基づき周波数が高域側にシフトする。その場合、同じ周波数で駆動した時の速度と傾きが異なり制御性能が変化する。従って、良好な制御性を得るには制御ゲインの最適化が必要であるが、その調整方法は複雑となる。
【0007】
振動型アクチュエータの制御性向上を目的として、ニューラルネットワークなど様々な現代制御の応用が研究されている。特許文献1は、多自由度駆動が可能な振動型アクチュエータの制御において、目標位置まで最小の駆動量で到達するための回転軸ベクトルを選択していく制御方法である。振動型アクチュエータの逆モデルとしてニューラルネットワークを用い、回転軸ベクトルをニューラルネットワークに入力して位相及び振幅を出力して制御するものである。ニューラルネットワークのパラメータの学習は、モデル化した駆動推定シミュレータの特性に近づくように行っている。
【0008】
しかし特許文献1に示したニューラルネットワークを用いた制御は振動型アクチュエータの伝達関数に基づくモデルを作る必要があり、実機の挙動と完全に一致させることは難しかった。また、完全に一致したモデルが得られても、個体差や温度環境による性能ばらつき、耐久による経時変化によって制御性が損なわれてしまう。
【0009】
また特許文献2では被制御体を、Groverアルゴリズムが成り立つように設計された保存力下での運動する三体振動系の一部とみなし制御関数を解析的に導出しているが、アルゴリズムが複雑で、アクチュエータ制御には不向きだった。
【0010】
特許文献3は、プラントを制御するためのパラメータを量子サーチするものである。特許文献4は、量子系モデルを用いてパルス電子スピン共鳴(ESR)を用いた超電導共振器などに応用すべく、共振器回路の動作によってスピン系モデルにマイクロ波のパルスを照射する制御手法が開示されている。これらもまたアクチュエータ制御には不向きだった。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
2軸モーター
20日前
個人
配線器具用取付枠
3日前
ニデック株式会社
モータ
9日前
株式会社ダイヘン
電源装置
9日前
株式会社アイシン
ロータ
2日前
ニチコン株式会社
電源装置
1日前
個人
すだれ型の薄膜太陽光発電装置
1日前
ニデック株式会社
モータ
1日前
中国電力株式会社
給電装置
1日前
株式会社アイシン
ステータ
2日前
日産自動車株式会社
ロータ
9日前
トヨタ自動車株式会社
モータ
14日前
株式会社ミツバ
制動装置
21日前
株式会社ミツバ
駆動装置
9日前
富士電機株式会社
電力変換装置
16日前
個人
非対称鏡像力駆動型の静電発電機
16日前
株式会社ミツバ
回転電機
15日前
オムロン株式会社
電力変換装置
21日前
株式会社ミツバ
回転電機
2日前
コーセル株式会社
スイッチング電源装置
2日前
ニデック株式会社
コイル挿入装置
1日前
株式会社豊田自動織機
電動圧縮機
1日前
トヨタ自動車株式会社
自動充電ロボット
3日前
トヨタ自動車株式会社
回転電機のロータ
今日
ヴィガラクス株式会社
電気供給システム
22日前
矢崎総業株式会社
電気接続箱
22日前
個人
超電導ロータリー式発電原動機
21日前
学校法人金沢工業大学
レクテナ装置
9日前
富士電機株式会社
半導体モジュール
21日前
トヨタ自動車株式会社
積層コアの製造方法
1日前
株式会社ダイヘン
双方向コンバータ
15日前
株式会社デンソー
半導体装置
今日
ニデック株式会社
モータ及びモータの組み立て方法
9日前
日立建機株式会社
電動式作業機械
2日前
日本発條株式会社
ケーブルの止水構造
9日前
トヨタ自動車株式会社
駆動装置
22日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ