TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024048673
公報種別
公開特許公報(A)
公開日
2024-04-09
出願番号
2022154719
出願日
2022-09-28
発明の名称
パーツの自動配置方法およびパーツの自動配置プログラム
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G06F
30/392 20200101AFI20240402BHJP(計算;計数)
要約
【課題】ユーザーのパーツの自動配置のための設定の負担を軽減し、計算機に加わる負荷が少ない、パーツの自動配置方法を提供する。
【解決手段】
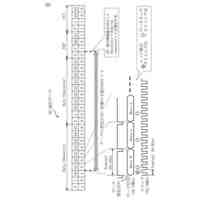
パーツ境界条件を取得するパーツ条件取得工程(a)、配置エリアへの配置順を取得するパーツ配置順取得工程(b)、境界パーツを示す境界線境界条件を取得する境界線取得工程(c)、パーツのストレッチ設定の有無を確認するストレッチ設定確認工程(d)、パーツの境界線上での連続配置の可否を確認する連続配置確認工程(e)、境界線の長さに基づいてパーツを元のパーツサイズから整数倍ストレッチしてストレッチパーツとするストレッチ工程(f)と、ストレッチパーツを配置するパーツ配置工程(g)と、パーツ配置工程の後、境界線および前記境界線境界条件を更新する更新工程(h)と、を備え、工程(a)~(h)を繰り返すことで、複数種類のパーツを配置エリアに自動で配置する。
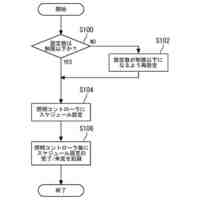
【選択図】図26
特許請求の範囲
【請求項1】
複数種類のパーツをコンピュータ支援設計ツールで設定される配置エリアに自動で配置するパーツの自動配置方法であって、
前記複数種類のパーツのそれぞれのパーツは、前記配置エリアの互いに直交する第1の方向および第2の方向にそれぞれ平行な辺を有する矩形状であって、
(a)前記パーツごとに設定される前記パーツに隣接して配置できる隣接配置パーツを示すパーツ境界条件を取得するパーツ条件取得工程と、
(b)前記パーツごとに設定される前記配置エリアへの配置順を取得するパーツ配置順取得工程と、
(c)前記配置エリアに設定される前記第1の方向または前記第2の方向に平行な境界線により隔てられる2つの領域に配置できる境界パーツを示す境界線境界条件を取得する境界線取得工程と、
(d)前記パーツ境界条件と前記境界線境界条件とを比較し、一致した場合に前記パーツのストレッチ設定の有無を確認するストレッチ設定確認工程と、
(e)前記ストレッチ設定がある場合、前記パーツ境界条件に基づいて、前記パーツの前記境界線上での連続配置の可否を確認する連続配置確認工程と、
(f)前記パーツの前記連続配置が可能な場合に、前記境界線の長さに基づいて前記パーツを元のパーツサイズから整数倍ストレッチしてストレッチパーツとするストレッチ工程と、
(g)前記ストレッチパーツを配置するパーツ配置工程と、
(h)前記パーツ配置工程の後、前記境界線および前記境界線境界条件を更新する更新工程と、を備え、
前記工程(a)~(h)を繰り返すことで、前記複数種類のパーツを前記配置エリアに自動で配置する、パーツの自動配置方法。
続きを表示(約 2,600 文字)
【請求項2】
複数種類のパーツをコンピュータ支援設計ツールで設定される配置エリアに自動で配置するパーツの自動配置方法であって、
前記複数種類のパーツのそれぞれのパーツは、前記配置エリアの互いに直交する第1の方向および第2の方向にそれぞれ平行な辺を有する矩形状であって、
(a)前記パーツごとに設定される前記パーツに隣接して配置できる隣接配置パーツを示すパーツ境界条件を取得するパーツ条件取得工程と、
(b)前記パーツごとに設定される前記配置エリアへの配置順を取得するパーツ配置順取得工程と、
(c)前記配置エリアに設定される前記第1の方向または前記第2の方向に平行な境界線により隔てられる2つの領域に配置できる境界パーツを示す境界線境界条件を取得する境界線取得工程と、
(d)前記パーツ境界条件と前記境界線境界条件とを比較し、一致した場合に前記パーツのアレイ設定の有無を確認するアレイ設定確認工程と、
(e)前記アレイ設定がある場合、前記パーツ境界条件に基づいて、前記パーツの前記境界線上での連続配置の可否を確認する連続配置確認工程と、
(f)前記パーツの前記連続配置が可能な場合に、前記境界線の長さに基づいて前記パーツをパーツサイズの整数倍の個数のアレイとして配置するアレイ配置のアレイ数を計算するアレイ数計算工程と、
(g)前記アレイ数に基づいて前記パーツをアレイ配置するアレイ配置工程と、
(h)前記アレイ配置工程の後、前記境界線および前記境界線境界条件を更新する更新工程と、を備え、
前記工程(a)~(h)を繰り返すことで、前記複数種類のパーツを前記配置エリアに自動で配置する、パーツの自動配置方法。
【請求項3】
前記工程(d)において、前記パーツの境界条件と前記境界線境界条件とが一致しない場合に、
(i)前記パーツを前記配置順が前記パーツの次である異なる種類のパーツに変更するパーツ種類変更工程を備える、請求項1または請求項2記載のパーツの自動配置方法。
【請求項4】
複数種類のパーツをコンピュータ支援設計ツールで設定される配置エリアに自動で配置するステップをコンピュータに実行させるパーツの自動配置プログラムであって、
前記複数種類のパーツのそれぞれのパーツは、前記配置エリアの互いに直交する第1の方向および第2の方向にそれぞれ平行な辺を有する矩形状であって、
(a)前記パーツごとに設定される前記パーツに隣接して配置できる隣接配置パーツを示すパーツ境界条件を取得するパーツ条件取得ステップと、
(b)前記パーツごとに設定される前記配置エリアへの配置順を取得するパーツ配置順取得ステップと、
(c)前記配置エリアに設定される前記第1の方向または前記第2の方向に平行な境界線により隔てられる2つの領域に配置できる境界パーツを示す境界線境界条件を取得する境界線取得ステップと、
(d)前記パーツ境界条件と前記境界線境界条件とを比較し、一致した場合に前記パーツのストレッチ設定の有無を確認するストレッチ設定確認ステップと、
(e)前記ストレッチ設定がある場合、前記パーツ境界条件に基づいて、前記パーツの前記境界線上での連続配置の可否を確認する連続配置確認ステップと、
(f)前記パーツの前記連続配置が可能な場合に、前記境界線の長さに基づいて前記パーツを元のパーツサイズから整数倍ストレッチしてストレッチパーツとするストレッチ工程と、
(g)前記ストレッチパーツを配置するパーツ配置ステップと、
(h)前記パーツ配置ステップの後、前記境界線および前記境界線境界条件を更新する更新ステップと、を備え、
前記ステップ(a)~(h)を繰り返すことで、前記複数種類のパーツを前記配置エリアに自動で配置する、パーツの自動配置プログラム。
【請求項5】
複数種類のパーツをコンピュータ支援設計ツールで設定される配置エリアに自動で配置するステップをコンピュータに実行させるパーツの自動配置プログラムであって、
前記複数種類のパーツのそれぞれのパーツは、前記配置エリアの互いに直交する第1の方向および第2の方向にそれぞれ平行な辺を有する矩形状であって、
(a)前記パーツごとに設定される前記パーツに隣接して配置できる隣接配置パーツを示すパーツ境界条件を取得するパーツ条件取得ステップと、
(b)前記パーツごとに設定される前記配置エリアへの配置順を取得するパーツ配置順取得ステップと、
(c)前記配置エリアに設定される前記第1の方向または前記第2の方向に平行な境界線により隔てられる2つの領域に配置できる境界パーツを示す境界線境界条件を取得する境界線取得ステップと、
(d)前記パーツ境界条件と前記境界線境界条件とを比較し、一致した場合に前記パーツのアレイ設定の有無を確認するステップと、
(e)前記アレイ設定がある場合、前記パーツ境界条件に基づいて、前記パーツの前記境界線上での連続配置の可否を確認する連続配置確認ステップと、
(f)前記パーツの前記連続配置が可能な場合に、前記境界線の長さに基づいて前記パーツをパーツサイズの整数倍の個数のアレイとして配置するアレイ配置のアレイ数を計算するアレイ数計算工程と、
(g)前記アレイ数に基づいて前記パーツをアレイ配置するアレイ配置ステップと、
(h)前記アレイ配置ステップの後、前記境界線および前記境界線境界条件を更新する更新ステップと、を備え、
前記ステップ(a)~(h)を繰り返すことで、前記複数種類のパーツを前記配置エリアに自動で配置する、パーツの自動配置プログラム。
【請求項6】
前記ステップ(d)において、前記パーツの境界条件と前記境界線境界条件とが一致しない場合に、
(i)前記パーツを前記配置順が前記パーツの次である異なる種類のパーツに変更するパーツ種類変更ステップを備える、請求項4または請求項5記載のパーツの自動配置プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、パーツの自動配置方法に関し、特に、半導体チップを構成する複数種類の半導体パーツを自動配置するパーツの自動配置方法に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
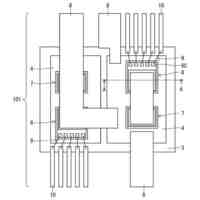
半導体装置の自動配置配線においては、特許文献1に開示されるように、アナログ回路とデジタル回路を境界線でブロック化してデジタル回路の自動配置配線を行う方法があるが、パワーデバイス用の半導体チップは、同一構造のユニットセルが複数並列に配置された構造を採り、幾何学的要素が強い配置となっており、特許文献1に開示の自動配置配線方法では対応できない。
【0003】
パワーデバイス用の半導体チップの半導体パーツの自動配置には、配置マップをプログラムで読み込ませた上で、配置数量と寸法調整を行ってチップサイズを微調整するマップ方式が挙げられるが、マップ方式には以下の問題が挙げられる。
【0004】
すなわち、マップ方式の場合、チップサイズ調整用の配置数量調整パーツと固定パーツを識別する必要があるため、ユーザーの設定量が増える。
【0005】
また、同一パーツの配置がある場合にパーツ分の座標設定が必要であり、アレイを使用する場合でも、縦横のアレイ数の設定が必要となる。
【0006】
また、パーツの回転および反転の設定が座標に関連付けられているため、同一パーツでも座標ごとに回転および反転の方向が異なると、ユーザーの設定量が増える。
【0007】
一方、マップ方式を用いず、自由配置する場合は、パーツ配置の有無の識別のため、メッシュを設けて配置座標を予め設ける方法が挙げられるが、パワーデバイス用の半導体チップは、大きさが数cmに達するのに対して、配置座標間隔は0.1μm以下であるため、10
10
個以上のメッシュが必要となり、計算機への負荷が大きくなる。
【先行技術文献】
【特許文献】
【0008】
特開2016-105234号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
本開示は上記のような問題を解決するためになされたものであり、ユーザーのパーツの自動配置のための設定の負担を軽減し、計算機に加わる負荷が少ない、パーツの自動配置方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本開示に係るパーツの自動配置方法は、複数種類のパーツをコンピュータ支援設計ツールで設定される配置エリアに自動で配置するパーツの自動配置方法であって、複数種類のパーツのそれぞれのパーツは、配置エリアの互いに直交する第1の方向および第2の方向にそれぞれ平行な辺を有する矩形状であって、前記パーツごとに設定される前記パーツに隣接して配置できる隣接配置パーツを示すパーツ境界条件を取得するパーツ条件取得工程(a)、前記パーツごとに設定される前記配置エリアへの配置順を取得するパーツ配置順取得工程(b)と、前記配置エリアに設定される前記第1の方向または前記第2の方向に平行な境界線により隔てられる2つの領域に配置できる境界パーツを示す境界線境界条件を取得する境界線取得工程(c)と、前記パーツ境界条件と前記境界線境界条件とを比較し、一致した場合に前記パーツのストレッチ設定の有無を確認するストレッチ設定確認工程(d)と、前記ストレッチ設定がある場合、前記パーツ境界条件に基づいて、前記パーツの前記境界線上での連続配置の可否を確認する連続配置確認工程(e)と、前記パーツの前記連続配置が可能な場合に、前記境界線の長さに基づいて前記パーツを元のパーツサイズから整数倍ストレッチしてストレッチパーツとするストレッチ工程(f)と、前記ストレッチパーツを配置するパーツ配置工程(g)と、前記パーツ配置工程の後、前記境界線および前記境界線境界条件を更新する更新工程(h)と、を備え、前記工程(a)~(h)を繰り返すことで、前記複数種類のパーツを前記配置エリアに自動で配置する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
表示装置
今日
三菱電機株式会社
照明器具
7日前
三菱電機株式会社
半導体装置
15日前
三菱電機株式会社
半導体装置
7日前
三菱電機株式会社
電力変換器
17日前
三菱電機株式会社
加熱調理器
16日前
三菱電機株式会社
回路遮断器
17日前
三菱電機株式会社
電動駆動装置
8日前
三菱電機株式会社
電動駆動装置
8日前
三菱電機株式会社
電力変換装置
1日前
三菱電機株式会社
電力変換装置
今日
三菱電機株式会社
監視システム
15日前
三菱電機株式会社
移動体制御装置
1日前
三菱電機株式会社
空気調和システム
15日前
三菱電機株式会社
車両位置推定装置
15日前
三菱電機株式会社
照明制御システム
16日前
三菱電機株式会社
空調制御システム
7日前
三菱電機株式会社
自動運転システム
1日前
三菱電機株式会社
回転電機の制御装置
今日
三菱電機株式会社
ピックアップステージ
7日前
三菱電機株式会社
アナログデジタル変換器
15日前
三菱電機株式会社
通信装置および通信方法
14日前
三菱電機株式会社
半導体装置、電力変換装置
7日前
三菱電機株式会社
半導体装置及びその製造方法
16日前
三菱電機株式会社
トランスおよび電力変換装置
8日前
三菱電機株式会社
降圧型定電流回路及び点灯装置
14日前
三菱電機株式会社
運転制御装置及び運転制御方法
7日前
三菱電機株式会社
加熱調理器及び加熱調理システム
7日前
三菱電機株式会社
移動体、および隊列走行システム
15日前
三菱電機株式会社
回転電機の電機子および回転電機
9日前
三菱電機株式会社
走行支援システム及び走行支援方法
2日前
三菱電機株式会社
測定装置、測定システム及び炊飯器
17日前
三菱電機株式会社
無線通信システム、および、学習装置
7日前
三菱電機株式会社
照明制御システムおよび照明制御装置
17日前
三菱電機株式会社
照明制御システムおよび照明制御装置
17日前
三菱電機株式会社
通信装置、通信システム、および通信方法
8日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ