TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024043492
公報種別
公開特許公報(A)
公開日
2024-03-29
出願番号
2023136592
出願日
2023-08-24
発明の名称
磁性楔及び回転電機
出願人
株式会社東芝
代理人
個人
,
個人
,
個人
主分類
H02K
3/493 20060101AFI20240322BHJP(電力の発電,変換,配電)
要約
【課題】優れた磁気特性および機械特性を有する、磁性楔、回転電機を提供する。
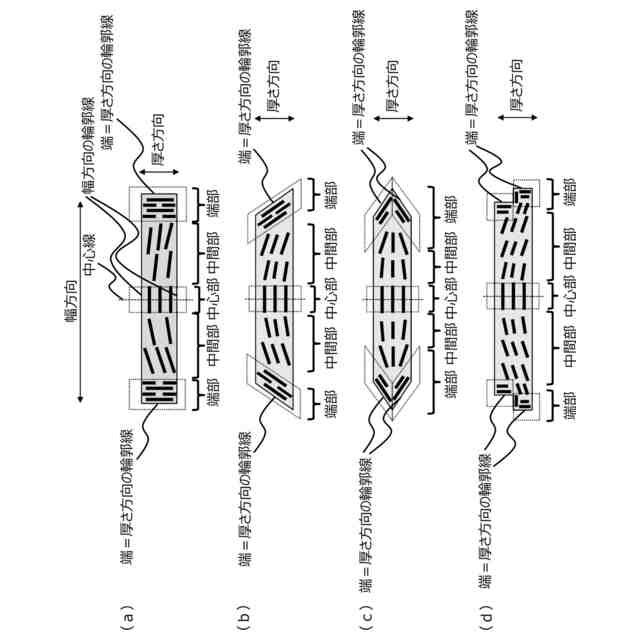
【解決手段】実施の形態の磁性楔は、回転電機の磁性楔であって、磁性楔は複数の扁平磁性金属粒子と介在相とを備え、磁性楔の幅方向の中心部において複数の扁平磁性金属粒子の扁平面が幅方向の輪郭線に沿って配向し、幅方向の端部において扁平面が磁性楔の厚さ方向の輪郭線に沿って配向し、幅方向の中心部における幅方向の輪郭線に対する複数の扁平磁性金属粒子の配向角度の平均が20度以下であり、幅方向の端部における厚さ方向の輪郭線に対する複数の扁平磁性金属粒子の配向角度の平均が60度以下である磁性楔である。
【選択図】図8
特許請求の範囲
【請求項1】
回転電機の磁性楔であって、
前記磁性楔は複数の扁平磁性金属粒子と介在相とを備え、
前記磁性楔の幅方向の中心部において前記複数の扁平磁性金属粒子の扁平面が前記幅方向の輪郭線に沿って配向し、前記幅方向の端部において前記扁平面が前記磁性楔の厚さ方向の輪郭線に沿って配向し、前記幅方向の前記中心部における前記幅方向の輪郭線に対する前記複数の扁平磁性金属粒子の配向角度の平均が20度以下であり、前記幅方向の前記端部における前記厚さ方向の輪郭線に対する前記複数の扁平磁性金属粒子の配向角度の平均が60度以下である磁性楔。
続きを表示(約 1,100 文字)
【請求項2】
回転電機の磁性楔であって、
前記磁性楔は複数の扁平磁性金属粒子と介在相とを備え、
前記磁性楔の幅方向の中心部において前記複数の扁平磁性金属粒子の扁平面が前記幅方向および長手方向に配向し、前記磁性楔の前記幅方向の端部において前記扁平面が厚さ方向および前記長手方向に配向し、前記幅方向の前記中心部における前記複数の扁平磁性金属粒子の配向角度の平均が20度以下であり、前記幅方向の前記端部における前記複数の扁平磁性金属粒子の配向角度の平均が30度以上90度以下である磁性楔。
【請求項3】
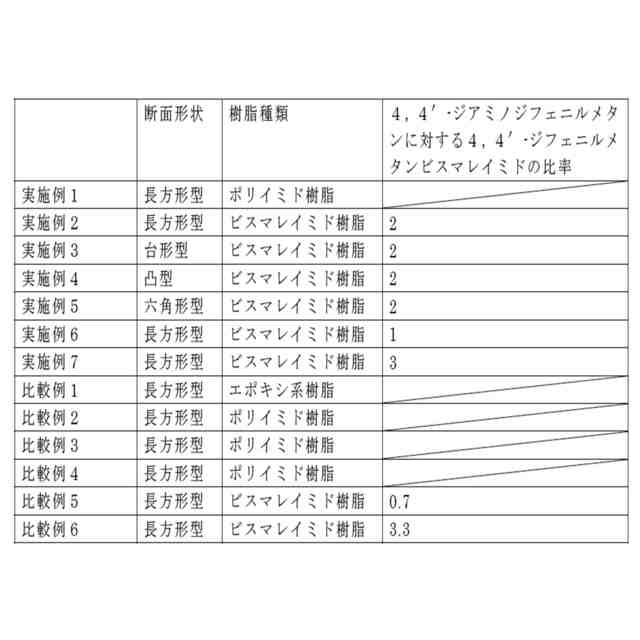
前記磁性楔の長さ方向に垂直な断面が台形型、凸型、六角形型、長方形型からなる群から選ばれる少なくとも1つである請求項1又は請求項2記載の磁性楔。
【請求項4】
回転子に対して径方向に所定の間隔をもって固定子が対向配置されたラジアルギャップ型の回転電機の前記磁性楔であって、
前記長手方向は、軸方向であり、
前記厚さ方向は、前記径方向であり、
前記幅方向は、回転方向である、
請求項1又は請求項2記載の磁性楔。
【請求項5】
回転子に対して軸方向に所定の間隔をもって固定子が対向配置されたアキシャルギャップ型の回転電機に用いられる前記磁性楔であって、
前記長手方向は、径方向であり、
前記厚さ方向は、前記軸方向であり、
前記幅方向は、回転方向である、
請求項1又は請求項2記載の磁性楔。
【請求項6】
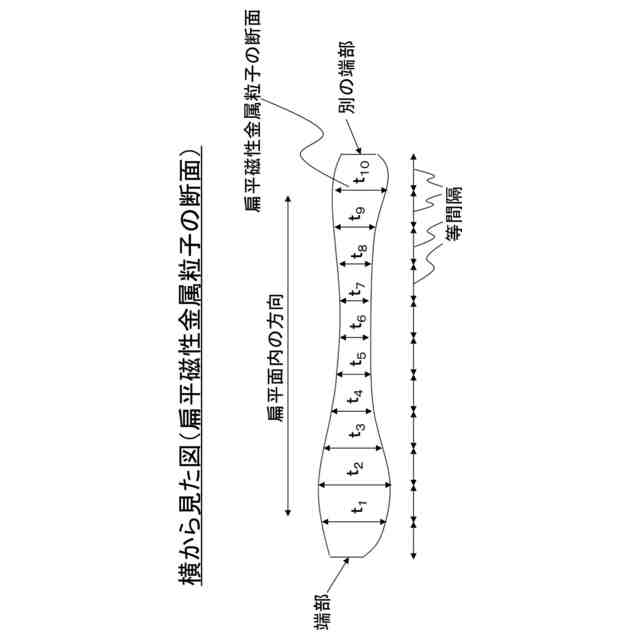
前記複数の扁平磁性金属粒子は、平均厚さが10nm以上100μm以下であり、前記扁平面と、Fe、Co及びNiからなる群から選ばれる少なくとも1つの第1の元素を含む磁性金属相と、を有し、前記厚さに対する前記扁平面内の平均長さの比の平均値が5以上10000以下であり、
前記介在相は、前記複数の扁平磁性金属粒子間に存在し、酸素(O)、炭素(C)、窒素(N)及びフッ素(F)からなる群から選ばれる少なくとも1つの第2の元素を含む、
請求項1又は請求項2記載の磁性楔。
【請求項7】
前記複数の扁平磁性金属粒子の平均厚さが10μm以上30μm以下であり、前記扁平磁性金属粒子の厚さに対する前記平均長さの比の平均値は10以上100以下である請求項6記載の磁性楔。
【請求項8】
前記介在相が樹脂を含む請求項1または請求項2記載の磁性楔。
【請求項9】
前記樹脂がビスマレイミド樹脂である請求項8記載の磁性楔。
【請求項10】
前記ビスマレイミド樹脂が、4,4′-ジフェニルメタンビスマレイミドを含む請求項9記載の磁性楔。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明の実施の形態は、磁性楔及び回転電機に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
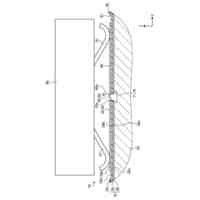
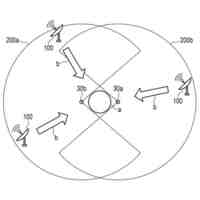
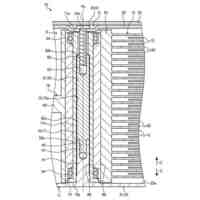
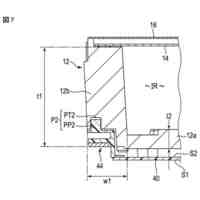
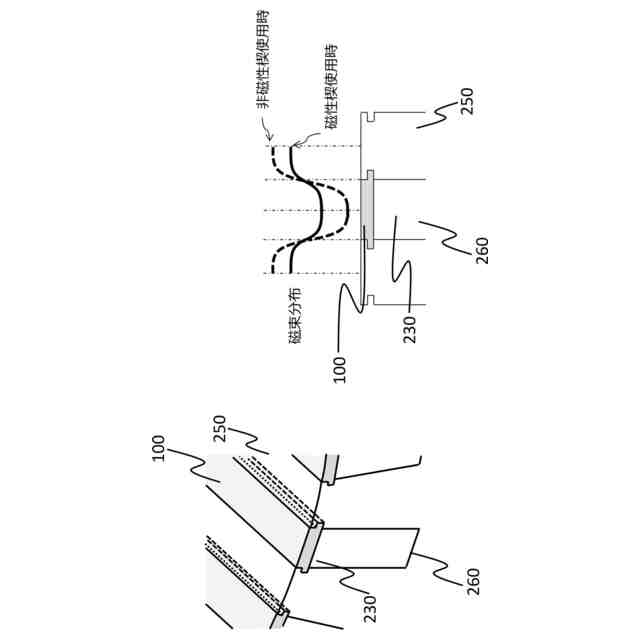
通常、回転電機のコイル巻線は、鉄心スロットの中に収納され、スロット開口部に設けた楔によって支持固定されている。この楔の材質には非磁性体が一般的に採用されるが、固定子鉄心及び回転子鉄心間の空隙における磁気抵抗値が不連続になるため、楔に空隙を介して対向する鉄心表面部の磁束分布に脈動が生じ、高調波損失が大きくなる。この高調波損失を低減する目的で、兼ねてより、適度に磁性をもった楔(磁性楔)が供されている。磁性楔を適用する事によって、高調波損失が低減し、回転電機の効率が向上する。図1は、磁性楔の使用状態及び磁性楔の効果の模式図である。図1では、ラジアルギャップ型回転電機を例として示している。図1では、磁性楔100、コイル230、鉄心ティース250、鉄心スロット260が記載されている。
【0003】
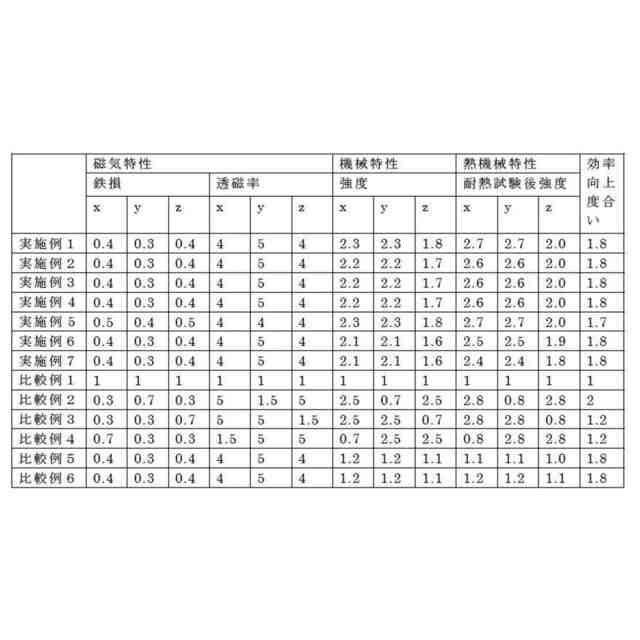
磁性楔にあたっては、磁性楔の透磁率が高いほど高調波損失を低減できることは言うまでもない。しかしながら、磁性楔は、図1に示すように、隣接する鉄心ティース間を橋絡するように配置されるため、磁性楔を介して鉄心ティース間を流れる漏れ磁束が増加してしまうという欠点がある。また、既存の磁性楔は、飽和磁化が低いため磁気飽和を起こしやすく、更には損失が低いため、回転電機の効率向上幅が限定的である。その他、既存の磁性楔は、透磁率が低いため、回転電機の効率向上幅が限定的であり、熱的安定性や機械特性(強度、靱性)の点で、不十分である。そのため、磁性楔の飽和磁化、透磁率、損失、強度、靱性などの点で特性を向上させる事が望まれる。特に、磁性楔の透磁率、損失、強度、などの点で特性を向上させる事が望まれる。
【先行技術文献】
【特許文献】
【0004】
実開昭58-6572号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、優れた磁気特性と機械特性を有する、磁性楔、及び、回転電機を提供する事にある。
【課題を解決するための手段】
【0006】
実施の形態の磁性楔は、回転電機の磁性楔であって、磁性楔は複数の扁平磁性金属粒子と介在相とを備え、磁性楔の幅方向の中心部において複数の扁平磁性金属粒子の扁平面が幅方向の輪郭線に沿って配向し、幅方向の端部において扁平面が磁性楔の厚さ方向の輪郭線に沿って配向し、幅方向の中心部における幅方向の輪郭線に対する複数の扁平磁性金属粒子の配向角度の平均が20度以下であり、幅方向の端部における厚さ方向の輪郭線に対する複数の扁平磁性金属粒子の配向角度の平均が60度以下である。
【0007】
また、実施の形態の磁性楔は、回転子に対して径方向に所定の間隔をもって固定子が対向配置されたラジアルギャップ型の回転電機の前記磁性楔であって、前記長手方向は、軸方向であり、前記厚さ方向は、前記径方向であり、前記幅方向は、回転方向である。また、磁性楔は、回転子に対して軸方向に所定の間隔をもって固定子が対向配置されたアキシャルギャップ型の回転電機に用いられる前記磁性楔であって、前記長手方向は、径方向であり、前記厚さ方向は、前記軸方向であり、前記幅方向は、回転方向である。
【図面の簡単な説明】
【0008】
磁性楔の使用状態及び磁性楔の効果の模式図である。
第1の実施の形態の磁性楔において、扁平磁性金属粒子の厚さの求め方の一例を示す概念図である。
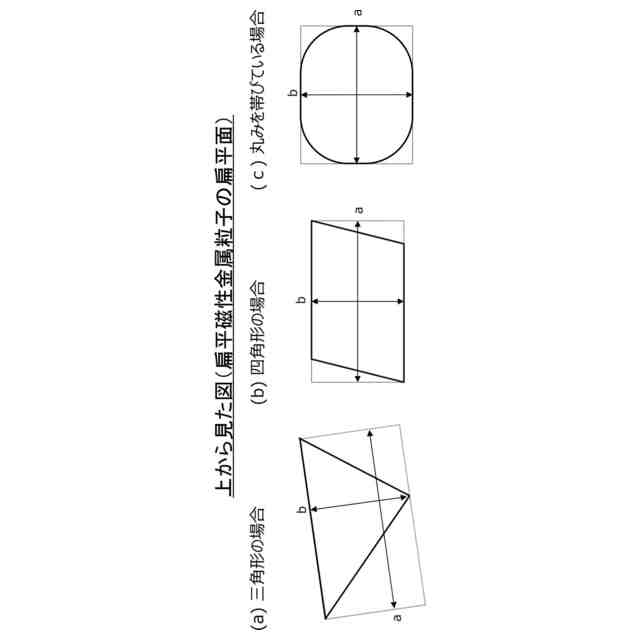
第1の実施の形態の磁性楔において、扁平磁性金属粒子の扁平面内の最大長さ、最小長さの求め方を説明するための概念図である。
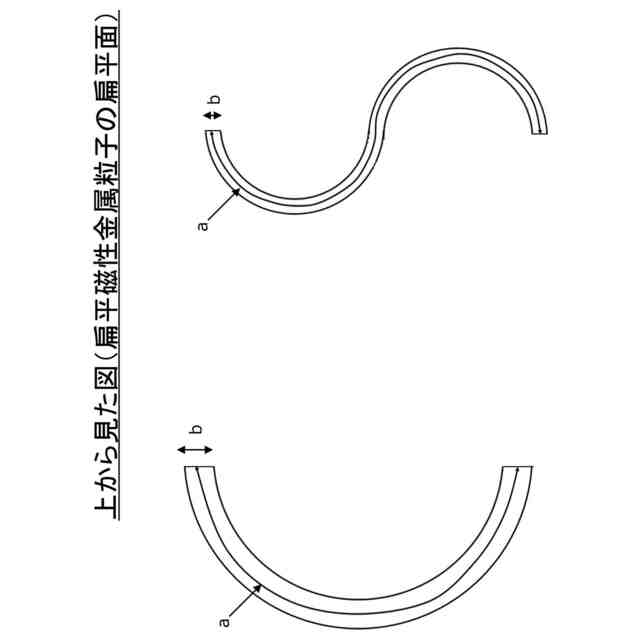
第1の実施の形態の磁性楔において、扁平磁性金属粒子の扁平面内の最大長さ、最小長さの他の一例における求め方を説明するための概念図である。
第1の実施の形態の磁性楔において、扁平磁性金属粒子の扁平面内の360度の角度に対して、22.5度おきに方向を変えて保磁力を測定した際の方向を示す模式図である。
第1の実施の形態の磁性楔における扁平磁性金属粒子の模式図である。
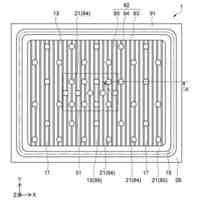
第1の実施の形態の磁性楔の模式図である。
第1の実施の形態の磁性楔の模式図である。
第1の実施の形態の磁性楔の模式図である。
第1の実施の形態の磁性楔の模式図である。
第1の実施の形態の磁性楔における扁平磁性金属粒子の配向角度の例である。
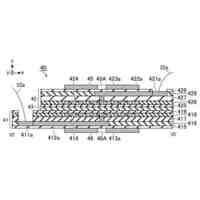
第1の実施の形態の磁性楔の断面写真例である。
第1の実施の形態の磁性楔の断面写真例である。
第1の実施の形態の実施例1の磁性楔、および、比較例1、2、3、4の磁性楔の模式図である。
第1の実施の形態の磁性楔の模式図である。
第1の実施の形態の磁性楔の製造方法における第5の工程の模式図である。
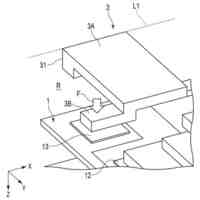
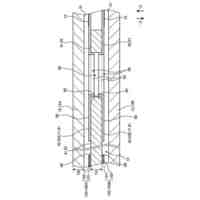
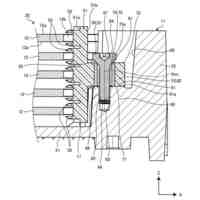
第2の実施形態のラジアルギャップ型回転電機の一例を示す模式図である。
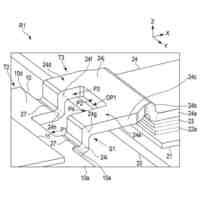
第2の実施形態のアキシャルギャップ型回転電機の一例を示す模式図である。
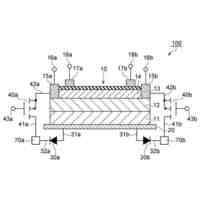
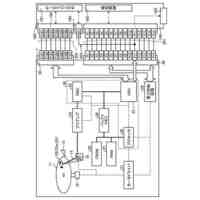
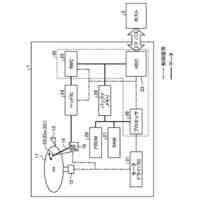
第2の実施形態の発電機の一例を示す模式図である。
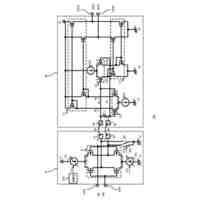
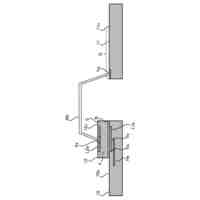
第2の実施形態のリニアモータの一例を示す模式図である。
【発明を実施するための形態】
【0009】
以下、図面を用いて実施の形態を説明する。尚、図面中、同一又は類似の箇所には、同一又は類似の符号を付している。なお、本明細書において、特に断りがなければ、測定は25℃でおこなっている。
【0010】
本明細書において、「軸方向」、「回転方向」及び「径方向」の各方向は、回転電機の回転子を基準として定めるものとする。即ち、「軸方向」は回転子の回転軸に沿った方向を意味し、「回転方向」は回転子の回転軸まわりの周回方向(又は、その接線方向)を意味する。そして、「径方向」は回転子の回転軸に直交(垂直に交差)する方向を意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
電源回路
23日前
株式会社東芝
発電設備
11日前
株式会社東芝
電解装置
1か月前
株式会社東芝
検査装置
17日前
株式会社東芝
電子機器
1か月前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
25日前
株式会社東芝
搬送ローラ
13日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
26日前
株式会社東芝
半導体装置
13日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
13日前
株式会社東芝
レーダ装置
3日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
26日前
株式会社東芝
アイソレータ
26日前
株式会社東芝
ディスク装置
26日前
株式会社東芝
信号伝送装置
26日前
株式会社東芝
ディスク装置
25日前
株式会社東芝
ディスク装置
26日前
株式会社東芝
信号伝送装置
26日前
株式会社東芝
ディスク装置
26日前
株式会社東芝
ディスク装置
26日前
株式会社東芝
ディスク装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ