TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024043178
公報種別
公開特許公報(A)
公開日
2024-03-29
出願番号
2022148214
出願日
2022-09-16
発明の名称
物理量検出装置
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G01B
7/30 20060101AFI20240322BHJP(測定;試験)
要約
【課題】検出精度を向上し、且つ、体格を小型化した物理量検出装置を提供する。
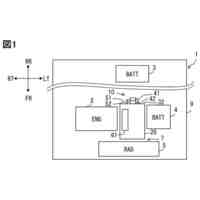
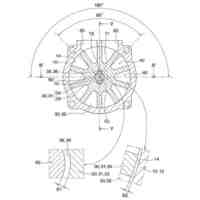
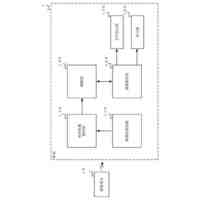
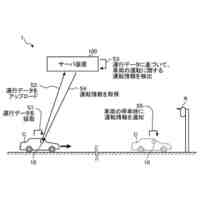
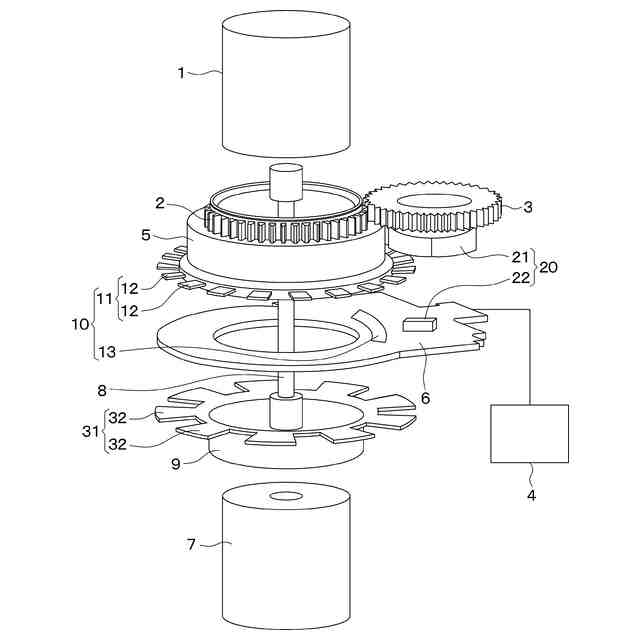
【解決手段】第1センサ10は、ステアリングホイールに連動して回転する軸部材1に設けた金属ターゲット11および車体側に設けた励磁検出コイル13を有し、電磁誘導の原理を用いて軸部材1の回転角度に応じた信号を出力する。メインギヤ2は、軸部材1に設けられ、サブギヤ3は、メインギヤ2に噛合する。第2センサ20は、サブギヤ3の回転角度に応じた信号を出力する。電子制御部4は、第1センサ10の信号から算出した操舵角と第2センサ20の信号から算出した操舵角との差が所定の閾値より大きい場合、第1センサ10の信号から算出した操舵角を、第2センサ20の信号から算出した操舵角に近づけるように補正し、ステアリングホイールの真の操舵角を検出する。
【選択図】図1
特許請求の範囲
【請求項1】
車両のステアリングホイールの操舵に関する物理量を検出する物理量検出装置において、
前記ステアリングホイールに連動して回転する軸部材(1)と、
前記軸部材に設けた金属ターゲット(11)および車体側に設けた励磁検出コイル(13)を有し、電磁誘導の原理を用いて前記軸部材の回転角度に応じた信号を出力する第1センサ(10)と、
前記軸部材に設けられるメインギヤ(2)と、
前記メインギヤに噛合するサブギヤ(3)と、
前記サブギヤの回転角度に応じた信号を出力する第2センサ(20)と、
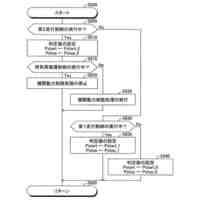
前記第1センサの信号から算出した操舵角と前記第2センサの信号から算出した操舵角との差が所定の閾値より大きい場合、前記第1センサの信号から算出した操舵角を、前記第2センサの信号から算出した操舵角に近づけるように補正し、前記ステアリングホイールの真の操舵角を検出する電子制御部(4)と、を備える物理量検出装置。
続きを表示(約 1,000 文字)
【請求項2】
前記軸部材の回転に伴って前記第1センサが出力する信号の周期は、前記軸部材の回転に伴って前記第2センサが出力する信号の周期よりも短い、請求項1に記載の物理量検出装置。
【請求項3】
前記軸部材は前記ステアリングホイールから運転者の操舵力が入力される入力軸であり、
前記入力軸に対して同軸的に設けられる出力軸(7)と、
一端(8a)が前記入力軸に固定され、他端(8b)が前記出力軸に固定され、前記入力軸と前記出力軸とに作用する捩じりトルクに応じて弾性変形するトーションバー(8)と、
前記出力軸の回転角度に応じた信号を出力する第3センサ(30)と、をさらに備え、
前記電子制御部は、前記第1センサの出力信号および前記第2センサの出力信号から検出した前記入力軸の真の操舵角と、前記第3センサの出力信号とを比較し、操舵トルクを算出する、請求項1または2に記載の物理量検出装置。
【請求項4】
前記電子制御部は、前記第1センサの出力信号および前記第2センサの出力信号から検出した前記入力軸の真の操舵角から、前記第1センサの信号および前記第2センサの信号から検出した前記入力軸の操舵角と前記出力軸の操舵角とが同一と仮定したときの前記第3センサの出力信号を前記第3センサの期待値として算出し、前記第3センサの実際の出力信号と前記第3センサの期待値との差角から操舵トルクを算出する、請求項3に記載の物理量検出装置。
【請求項5】
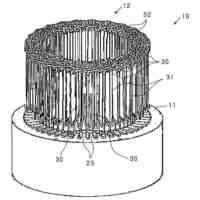
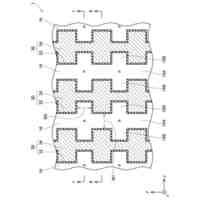
前記第3センサは、前記出力軸に設けた金属ターゲット(31)および前記車体側に設けた励磁検出コイル(33)を有し、電磁誘導の原理を用いて前記出力軸の回転角度に応じた信号を出力するインダクティブセンサである、請求項3に記載の物理量検出装置。
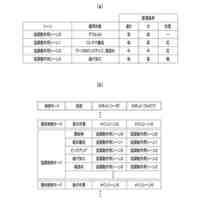
【請求項6】
前記第1センサおよび前記第3センサのうち一方のセンサが有する前記金属ターゲットの羽根の数は、他方のセンサが有する前記金属ターゲットの羽根の数の整数倍を除く数である、請求項5に記載の物理量検出装置。
【請求項7】
前記第1センサおよび前記第3センサのうち前記金属ターゲットの羽根の数が少ない方のセンサが有する羽根の数は、前記第1センサおよび前記第3センサのうち前記金属ターゲットの羽根の数が多い方のセンサが有する羽根の数の2分の1より多い、請求項6に記載の物理量検出装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物理量検出装置に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
従来、車両のステアリングホイールの操舵に関する物理量(即ち、操舵角、操舵トルク等)を検出する物理量検出装置が知られている。
特許文献1に記載の装置は、車両のステアリングホイールに連動して回転するロータ部の外周面に互いに歯数の異なる第1伝達ギヤ部と第2伝達ギヤ部を設け、その第1伝達ギヤ部に噛合う第1出力ギヤと、第2伝達ギヤ部に噛合う第2出力ギヤとを備えている。そして、この装置は、第1出力ギヤに設けた磁気センサの出力信号と、第2出力ギヤに設けた磁気センサの出力信号との差を算出することで、ロータ部における360°以上(例えば0~1440°)の操舵角を検出するものである。
【先行技術文献】
【特許文献】
【0003】
特許第4562355号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載の装置は、ロータ部の外側に第1出力ギヤと第2出力ギヤといった2個のギヤを備えているので、体格が大型化している。また、特許文献1に記載の装置は、第1出力ギヤに設けた磁気センサの出力信号と、第2出力ギヤに設けた磁気センサの出力信号がいずれも、ギヤのバックラッシュの影響を大きく受けるので、操舵角の検出精度が低いという問題がある。
【0005】
本発明は上記点に鑑みて、検出精度を向上し、且つ、体格を小型化した物理量検出装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
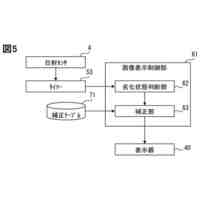
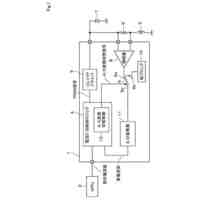
上記目的を達成するため、請求項1に係る発明によると、車両のステアリングホイールの操舵に関する物理量を検出する物理量検出装置は、軸部材(1)、第1センサ(10)、メインギヤ(2)、サブギヤ(3)、第2センサ(20)および電子制御部(4)を備える。軸部材は、ステアリングホイールに連動して回転する。第1センサは、軸部材に設けた金属ターゲット(11)および車体側に設けた励磁検出コイル(13)を有し、電磁誘導の原理を用いて軸部材の回転角度に応じた信号を出力する。メインギヤは、軸部材に設けられる。サブギヤは、メインギヤに噛合する。第2センサは、サブギヤの回転角度に応じた信号を出力する。電子制御部は、第1センサの信号から算出した操舵角と第2センサの信号から算出した操舵角との差が所定の閾値より大きい場合、第1センサの信号から算出した操舵角を、第2センサの信号から算出した操舵角に近づけるように補正し、ステアリングホイールの真の操舵角を検出する。
【0007】
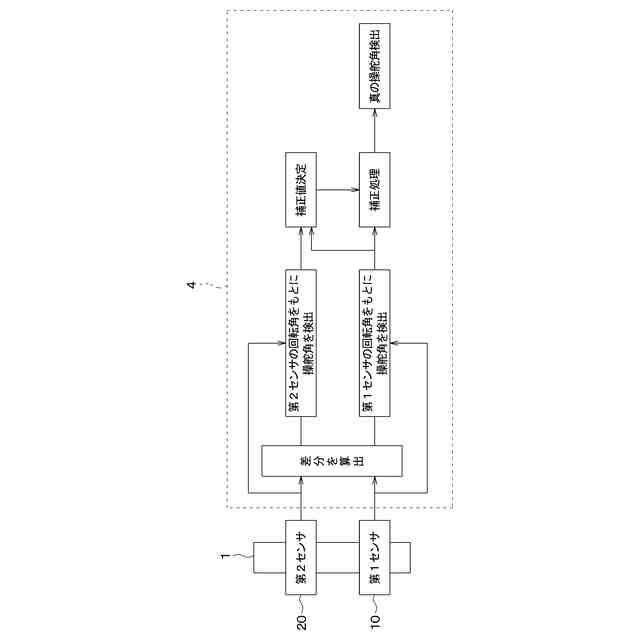
これによれば、軸部材の回転角度に応じた信号を電磁誘導の原理を用いて出力する第1センサは、高精度であるが、ノイズ等の誤差要因により金属ターゲットの羽根の電気角分の誤検知を発生することがある。一方、サブギヤの回転角度に応じた信号を出力する第2センサは、メインギヤとサブギヤとのバックラッシュに対する許容量が大きく、精度が低いが、サブギヤの回転の回数に関わるような大きな誤検知を発生することが無い。そこで、第1センサの信号から算出した操舵角と第2センサの信号から算出した操舵角とを比較し、第1センサの信号から算出した操舵角に誤検知が生じているか否かを閾値判定する。そして、第1センサの信号から算出した操舵角に誤検知が生じている場合、その第1センサの信号から算出した操舵角を、第2センサの信号から算出した操舵角を基準として補正する。具体的には、第1センサの信号から算出した操舵角を、誤検知した羽根の数に相当する電気角分、第2センサの信号から算出した操舵角に近づけるように補正する。これにより、物理量検出装置は、真の操舵角を高精度に検出できる。また、この検出方法によりバックラッシュに対する許容量が大きくなるので、ギヤを小型化することが可能となる。したがって、物理量検出装置は、検出精度を向上し、且つ、体格を小型化できる。
さらに、この物理量検出装置は、バックラッシュに対する許容量が大きくなるので、メインギヤとサブギヤの歯数と、第1センサの有する金属ターゲットの羽根の数において選択可能な組み合わせを増やすことができる。
【0008】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0009】
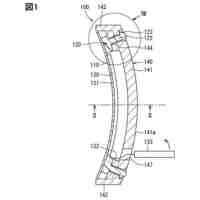
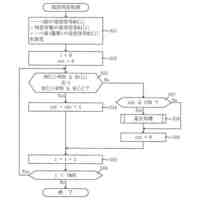
第1実施形態に係る物理量検出装置において操舵角の検出方法を説明するための説明図である。
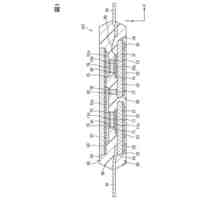
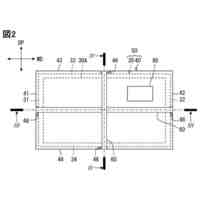
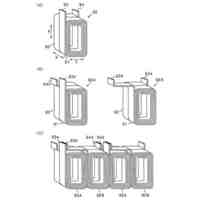
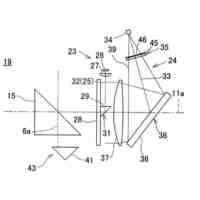
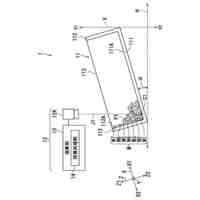
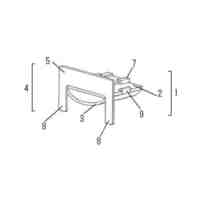
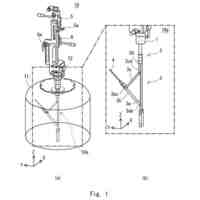
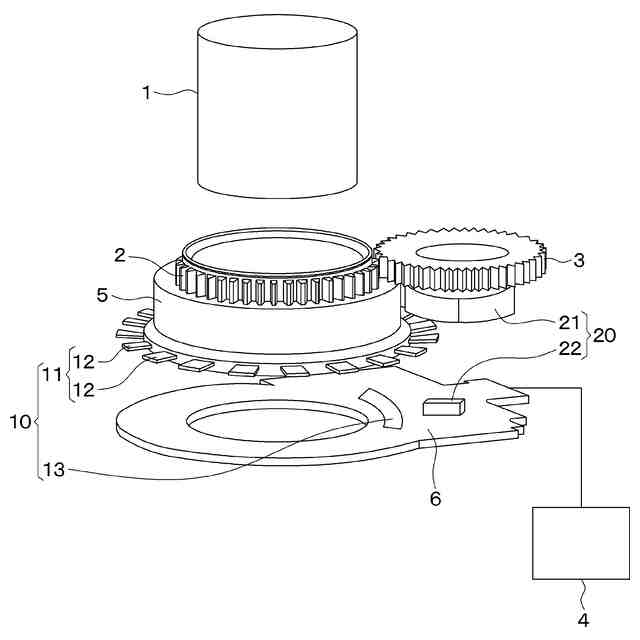
第1実施形態に係る物理量検出装置の分解斜視図である。
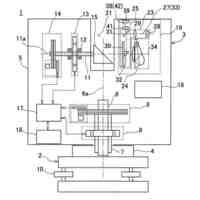
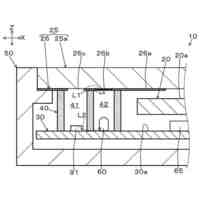
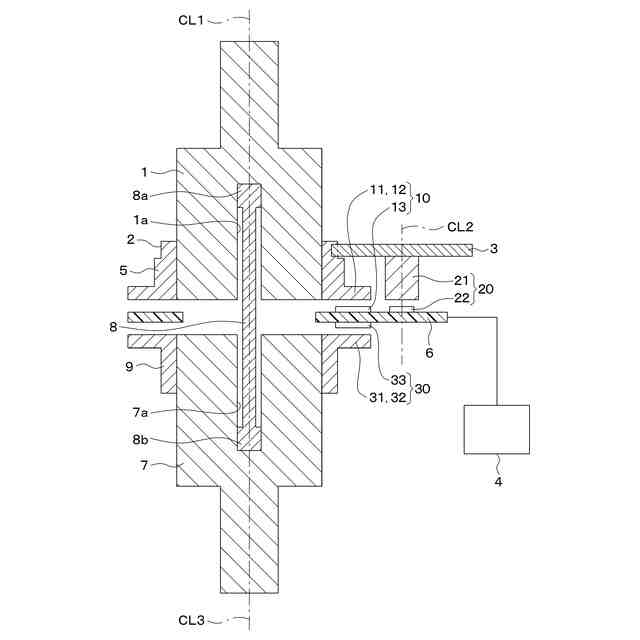
第1実施形態に係る物理量検出装置において軸部材の軸心に沿った断面図である。
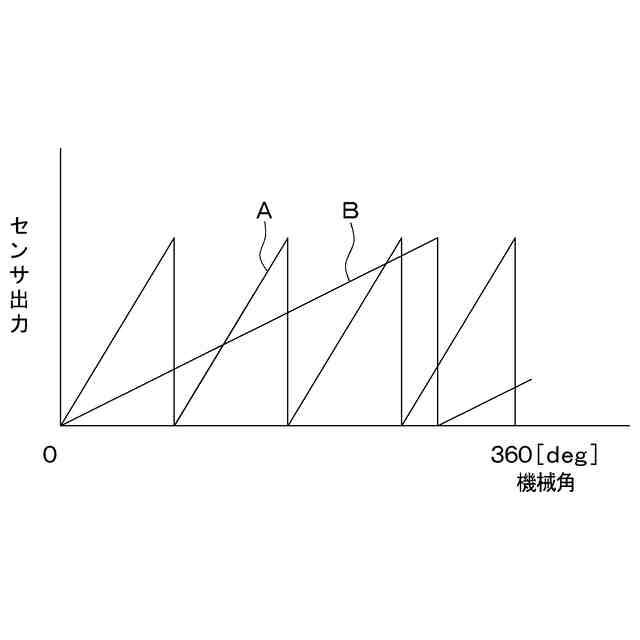
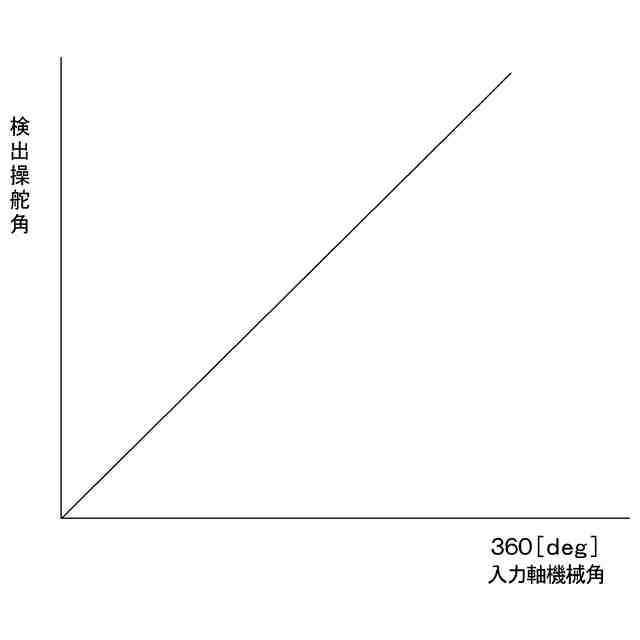
軸部材の機械角に対する、第1センサの出力信号と、第2センサの出力信号との関係を示すグラフである。
第1センサから算出した操舵角を補正する方法を説明するためのグラフである。
第2実施形態に係る物理量検出装置において操舵トルクの検出方法を説明するための説明図である。
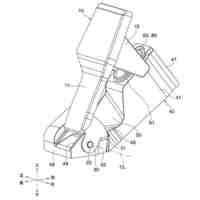
第2実施形態に係る物理量検出装置の分解斜視図である。
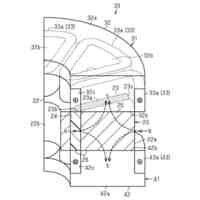
第2実施形態に係る物理量検出装置において軸部材の軸心に沿った断面図である。
入力軸の機械角に対する、第1センサおよび第2センサの出力信号により検出した入力軸の操舵角を示すグラフである。
出力軸の機械角に対する、入力軸の操舵角から算出した第3センサの期待値と、第3センサの実際の出力信号との関係を示すグラフである。
比較例の物理量検出装置の分解斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照しつつ説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付し、その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
構造体
4日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
虚像表示装置
4日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
巻線界磁ロータ
4日前
株式会社デンソー
モータ制御装置
5日前
株式会社デンソー
回転電機のステータ
4日前
株式会社デンソーウェーブ
ロボット制御システム
4日前
株式会社デンソーウェーブ
ロボット制御システム
4日前
株式会社デンソー
車両用表示制御システム
5日前
株式会社デンソー
半導体装置とその製造方法
4日前
株式会社デンソー
リニアソレノイド電流制御装置
4日前
トヨタ自動車株式会社
車両走行装置
4日前
株式会社SOKEN
地図更新システム
4日前
株式会社SOKEN
ロータリ型多方弁
4日前
トヨタ自動車株式会社
排気センサの制御装置
5日前
株式会社デンソー
制御装置、運航管理システム、および制御プログラム
4日前
株式会社デンソーテン
車載装置、情報処理システムおよび車載装置の制御方法
4日前
株式会社デンソー
ペダル装置
6日前
株式会社デンソー
ロータの製造装置、ロータの製造方法及びロータ
6日前
個人
健康状態検査材
14日前
株式会社CCT
表示装置
13日前
株式会社トプコン
測定装置
20日前
日本精機株式会社
センサユニット
5日前
株式会社トプコン
測量装置
19日前
株式会社SUBARU
車両
21日前
株式会社SUBARU
車両
21日前
ニデック株式会社
検出装置
20日前
株式会社トプコン
測量装置
19日前
株式会社チノー
放射温度計
6日前
日本精機株式会社
車両用表示装置
20日前
個人
コンベックスルール用測定部品
12日前
本多電子株式会社
水中探知装置
20日前
株式会社XMAT
点検システム
21日前
トヨタ自動車株式会社
給水治具
11日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ