TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024057895
公報種別
公開特許公報(A)
公開日
2024-04-25
出願番号
2022164873
出願日
2022-10-13
発明の名称
制御装置、運航管理システム、および制御プログラム
出願人
株式会社デンソー
代理人
個人
,
個人
,
個人
主分類
B64C
27/24 20060101AFI20240418BHJP(航空機;飛行;宇宙工学)
要約
【課題】飛行の安全性を高めること。
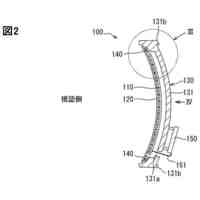
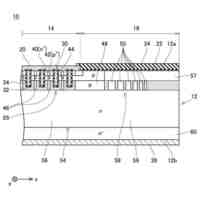
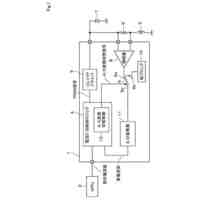
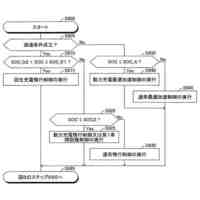
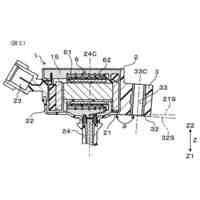
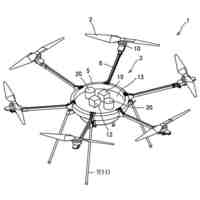
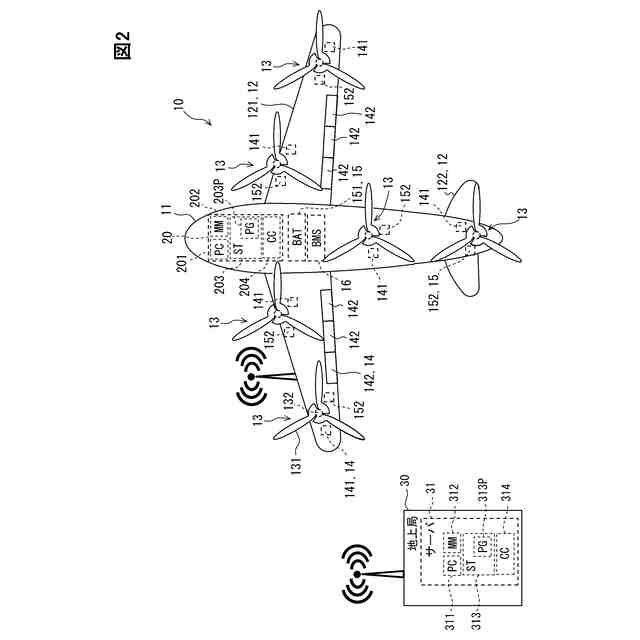
【解決手段】制御装置60は、駆動用機器15によって駆動され、回転揚力を生じる回転翼13と、滑空揚力を生じる固定翼と、滑空揚力を調整する揚力調整機構と、を備えるeVTOLの飛行を制御する。制御装置60は、回転翼13の駆動を制御することで、回転揚力を調整する回転翼制御部621と、揚力調整機構の駆動を制御することで、滑空揚力を調整する固定翼制御部622を備える。電動飛行機の飛行時において駆動用機器15の異常が予知または検知された場合に、回転翼制御部621は回転揚力を低減させ、固定翼制御部622は滑空揚力を増大させる、揚力調整制御を実行する。
【選択図】図4
特許請求の範囲
【請求項1】
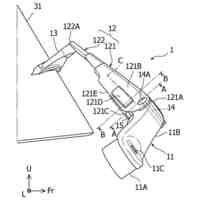
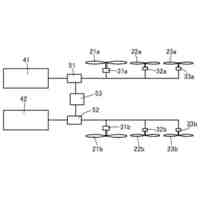
駆動用機器(15)によって駆動され、回転揚力を生じる回転翼(13)と、滑空揚力を生じる固定翼(12)と、前記滑空揚力を調整する揚力調整機構(14)と、を備える電動飛行機(10)の制御装置であって、
前記回転翼の駆動を制御することで、前記回転揚力を調整する回転翼制御部(621)と、
前記揚力調整機構の駆動を制御することで、前記滑空揚力を調整する固定翼制御部(622)と、
を備え、
前記電動飛行機の飛行時において前記駆動用機器の異常が予知または検知された場合に、前記回転翼制御部は前記回転揚力を低減させ、前記固定翼制御部は前記滑空揚力を増大させる、揚力調整制御を実行する、制御装置。
続きを表示(約 940 文字)
【請求項2】
前記駆動用機器の異常が予知または検知された場合に、前記電動飛行機の巡航時において前記回転翼制御部および前記固定翼制御部は前記揚力調整制御を実行する、請求項1に記載の制御装置。
【請求項3】
前記電動飛行機の巡航時であって、着陸開始に対して少なくとも所定期間前から、前記回転翼制御部および前記固定翼制御部は前記揚力調整制御を実行する、請求項2に記載の制御装置。
【請求項4】
前記駆動用機器の異常が予知または検知された場合に、前記電動飛行機の静音要求エリアの飛行時において、前記回転翼制御部および前記固定翼制御部は前記揚力調整制御を実行する、請求項2に記載の制御装置。
【請求項5】
前記回転翼制御部および前記固定翼制御部は、前記電動飛行機が所定高度範囲かつ所定航行速度範囲内で安定飛行が可能な推力および全揚力を保ちながら、前記揚力調整制御を実行する、請求項2~4いずれか1項に記載の制御装置。
【請求項6】
前記回転翼制御部および前記固定翼制御部は、安定飛行が可能な前記推力および前記全揚力を保つことができない場合に、前記電動飛行機を着陸させるための制御を実行する、請求項5に記載の制御装置。
【請求項7】
前記揚力調整制御の実行時において、前記電動飛行機の着陸を制限する、請求項2~4いずれか1項に記載の制御装置。
【請求項8】
前記駆動用機器の異常が予知または検知された場合に、前記電動飛行機の着陸時において前記回転翼制御部および前記固定翼制御部は前記揚力調整制御を実行する、請求項1に記載の制御装置。
【請求項9】
前記電動飛行機の離陸時において、前記揚力調整制御の実行を禁止する、請求項1に記載の制御装置。
【請求項10】
前記駆動用機器は、前記回転翼に対して冗長に設けられた複数の機器を含み、
冗長に設けられた前記複数の機器それぞれの異常が予知または検知された場合に、前記回転翼制御部および前記固定翼制御部は前記揚力調整制御を実行する、請求項1に記載の制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この明細書における開示は、制御装置、運航管理システム、および制御プログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
特許文献1は、バッテリの電力で駆動する回転翼を備えたドローンを開示している。先行技術文献の記載内容は、この明細書における技術的要素の説明として、参照により援用される。
【先行技術文献】
【特許文献】
【0003】
特開2020-196440号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
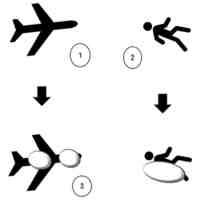
バッテリを含む、回転翼の駆動用機器には、高出力負荷や航行環境のばらつきによって、温度やSOCの一時的な異常が発生し得る。たとえば特許文献1に開示のように駆動用機器を複数設けて冗長性をもたせたとしても、上記した異常は、複数の駆動用機器において同時に生じる虞がある。つまり、駆動用機器の冗長性を確保できなくなる虞がある。上記した観点において、または言及されていない他の観点において、制御装置、運航管理システム、および制御プログラムにはさらなる改良が求められている。
【0005】
開示されるひとつの目的は、飛行の安全性を高めることができる制御装置、運航管理システム、および制御プログラムを提供することにある。
【課題を解決するための手段】
【0006】
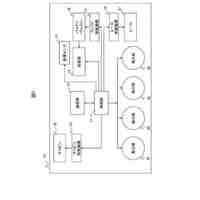
開示のひとつである制御装置は、
駆動用機器(15)によって駆動され、回転揚力を生じる回転翼(13)と、滑空揚力を生じる固定翼(12)と、滑空揚力を調整する揚力調整機構(14)と、を備える電動飛行機(10)の制御装置であって、
回転翼の駆動を制御することで、回転揚力を調整する回転翼制御部(621)と、
揚力調整機構の駆動を制御することで、滑空揚力を調整する固定翼制御部(622)と、
を備え、
電動飛行機の飛行時において駆動用機器の異常が予知または検知された場合に、回転翼制御部は回転揚力を低減させ、固定翼制御部は滑空揚力を増大させる、揚力調整制御を実行する。
【0007】
開示の制御装置によれば、駆動用機器の異常が予知または検知された場合に、回転揚力を低減させる。これにより、駆動用機器の負荷を減らし、異常の未然防止または解消の可能性を高めることができる。また、回転揚力の低減にともなって滑空揚力を増大させるため、揚力の低下を抑制することができる。よって、飛行の安全性を高めることができる。
【0008】
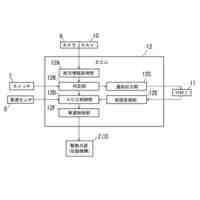
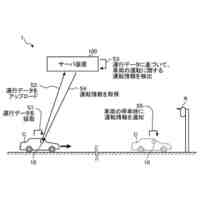
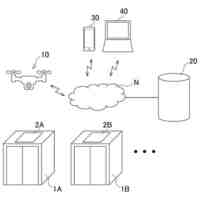
開示の他のひとつである運航管理システムは、
駆動用機器(15)によって駆動され、回転揚力を生じる回転翼(13)と、滑空揚力を生じる固定翼(12)と、滑空揚力を調整する揚力調整機構(14)と、を備える電動飛行機(10)の運航管理システムであって、
電動飛行機の飛行に関する情報を取得する情報取得装置(50)と、
情報に基づいて飛行制御を行う制御装置(60)と、
を備え、
制御装置は、回転翼の駆動を制御することで、回転揚力を調整する回転翼制御部(621)と、揚力調整機構の駆動を制御することで、滑空揚力を調整する固定翼制御部(622)と、を有し、
電動飛行機の飛行時に、情報として駆動用機器の異常が予知または検知された情報を取得すると、回転翼制御部は回転揚力を低減させ、固定翼制御部は滑空揚力を増大させる、揚力調整制御を実行する。
【0009】
開示の運航管理システムによれば、駆動用機器の異常が予知または検知された場合に、回転揚力を低減させる。これにより、駆動用機器の負荷を減らし、異常の未然防止または解消の可能性を高めることができる。また、回転揚力の低減にともなって滑空揚力を増大させるため、揚力の低下を抑制することができる。よって、飛行の安全性を高めることができる。
【0010】
開示の他のひとつである制御プログラムは、
駆動用機器(15)によって駆動され、回転揚力を生じる回転翼(13)と、滑空揚力を生じる固定翼(12)と、滑空揚力を調整する揚力調整機構(14)と、を備える電動飛行機(10)を制御する制御プログラムであって、
少なくともひとつの処理部(201)に、
回転翼の駆動の制御により回転揚力を調整させ、
揚力調整機構の駆動の制御により滑空揚力を調整させ、
電動飛行機の飛行時において駆動用機器の異常が予知または検知された場合に、回転揚力が減少し、滑空揚力が増大する制御を実行させる、
ことを含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
制御装置
4日前
株式会社デンソー
表示装置
5日前
株式会社デンソー
入出力制御装置
4日前
株式会社デンソー
巻線界磁ロータ
10日前
株式会社デンソー
回転電機のステータ
10日前
株式会社デンソーウェーブ
ロボット制御システム
10日前
株式会社デンソーウェーブ
ロボット制御システム
10日前
株式会社デンソー
半導体装置とその製造方法
3日前
株式会社デンソー
リニアソレノイド電流制御装置
10日前
株式会社デンソー
レーダ装置および信号処理プログラム
5日前
株式会社デンソー
表示制御装置及び表示制御プログラム
5日前
スズキ株式会社
車両用のフロントワイパ
5日前
トヨタ自動車株式会社
車両走行制御装置
3日前
トヨタ自動車株式会社
車両の運転支援装置
3日前
株式会社デンソーテン
ポートサンプリングシステム及びラッチ回路装置
5日前
株式会社デンソー
内燃機関用の点火コイル及びこれを備えた内燃機関
3日前
株式会社デンソーテン
車載装置、情報処理システムおよび車載装置の制御方法
10日前
株式会社SOKEN
車両制御装置及び車両制御プログラム
4日前
株式会社デンソー
時刻同期通信システム、時刻同期エンドステーション及びメッセージの送信制御プログラム
4日前
トヨタ自動車株式会社
衝突回避支援装置、衝突回避支援方法及び衝突回避支援プログラム
3日前
トヨタ自動車株式会社
車両制御装置、車両制御方法及び車両制御用コンピュータプログラム
4日前
株式会社デンソー
時刻同期通信システム、時刻同期マスタ、時刻同期スレーブ及び伝搬遅延時間の算出プログラム
4日前
株式会社ジェイテクト
車両用電源システム及び車両用電源システムの制御方法
3日前
個人
飛行体
26日前
個人
ドローン係留装置
3か月前
個人
ドローンの計測飛行方法
6か月前
個人
マルチコプター
10か月前
個人
自由落下運航システム
1か月前
個人
マルチコプター型電気飛行機
20日前
合同会社アドエア
飛行体落下補助装置
8か月前
合同会社アドエア
飛行体落下補助装置
2か月前
株式会社中北製作所
羽ばたき装置
5日前
河村電器産業株式会社
設備点検システム
5か月前
個人
飛行体
3か月前
株式会社FINEMECH
回転翼航空機
10か月前
個人
転落・墜落時事故防止用エアバッグ
11か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ