TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024059226
公報種別
公開特許公報(A)
公開日
2024-05-01
出願番号
2022166774
出願日
2022-10-18
発明の名称
制御装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
スズキ株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/16 20060101AFI20240423BHJP(信号)
要約
【課題】移動体に搭載される制御装置において、物体検出の安定性の低下を抑制する。
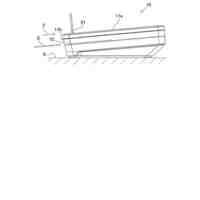
【解決手段】カメラ110と測距装置120とを有する移動体Mに搭載される制御装置200であって、画像と物体情報とを取得し、取得された画像から点群を取得する情報取得部211と、物体情報と点群とを利用して物体が存在するか否かを判定する物体判定部212と、物体が存在すると判定された場合に移動体の発進を抑制する発進抑制部214と、を備え、物体判定部は、第1探索領域内に点群が含まれる場合に物体が存在すると判定し、第1探索領域内に点群が含まれない場合であって、物体情報が示す距離と新たに測距装置により検出された距離との差異が閾値以下である場合に第2探索領域ARs2を設定し、第2探索領域内に点群が含まれる場合に物体が存在すると判定し、第1探索領域と第2探索領域とのいずれにおいても点群が含まれない場合に物体が存在しないと判定する。
【選択図】図1
特許請求の範囲
【請求項1】
カメラ(110)と測距装置(120)とを有する移動体(M)に搭載される制御装置(200)であって、
前記移動体の進行方向に向かって前記カメラにより撮像された画像と、前記測距装置により検出された前記移動体の進行方向に存在する物体(Ob)と前記移動体との距離を示す物体情報と、を取得し、取得された前記画像から前記物体の位置を表す点群を取得する情報取得部(211)と、
前記物体情報と前記点群とを利用して前記物体が存在するか否かを判定する物体判定部(212)と、
前記物体が存在すると判定された場合に、前記移動体の発進を抑制する発進抑制部(214)と、
を備え、
前記物体判定部は、予め定められた大きさの第1探索領域(ARs1)であって、前記物体情報が示す距離に応じた位置に設定される第1探索領域内に前記点群が含まれる場合に、前記物体が存在すると判定し、
前記第1探索領域内に前記点群が含まれない場合であって、取得された前記物体情報が示す距離と新たに前記測距装置により検出された距離との差異が予め定められた閾値以下である場合に、前記移動体から離れる方向に前記第1探索領域よりも拡張された第2探索領域(ARs2)を設定し、前記第2探索領域内に前記点群が含まれる場合に、前記物体が存在すると判定し、
前記第1探索領域と、前記第2探索領域とのいずれにおいても前記点群が含まれない場合に、前記物体が存在しないと判定する、
制御装置。
続きを表示(約 300 文字)
【請求項2】
請求項1に記載の制御装置であって、
前記物体情報を保持する不揮発メモリ(221)と、
前記物体判定部により前記物体が存在すると判定された場合であって、前記移動体が停止している場合に、新たに取得した前記物体情報を前記不揮発メモリに書き込む情報更新部(213)と、
をさらに備え、
前記不揮発メモリは、前記物体の有無を示す情報をさらに保持する、
制御装置。
【請求項3】
請求項2に記載の制御装置であって、
前記情報取得部は、前記物体情報を取得した後、前記不揮発メモリに保持された前記物体情報を消去する、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、車両の前方における物体の有無および物体と車両との距離を検出し、運転者によるシフト操作やペダル操作の間違いによる車両の誤発進を抑制する誤発進抑制技術が知られている。特許文献1に記載の物体検知装置は、車両に搭載されたカメラにより車両の前方を撮像し、車両の前方における物体の有無および物体と車両との距離を検出する。
【先行技術文献】
【特許文献】
【0003】
特開2020-12742号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ミリ波レーダ等の測距装置とカメラとを組み合わせた物体検知装置では、物体検知装置の起動時において物体の接地位置がカメラの画角から外れた状態となっている場合、カメラによる物体検出位置と測距装置による物体検出位置とに差異が生じ、安定して物体の有無および物体と車両との距離を検出できないおそれがある。このような問題は、車両に限らず、航空機やロボット等の移動体の発進時においても発生し得る。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、制御装置(200)が提供される。この制御装置は、カメラ(110)と測距装置(120)とを有する移動体(M)に搭載される制御装置であって、前記移動体の進行方向に向かって前記カメラにより撮像された画像と、前記測距装置により検出された前記移動体の進行方向に存在する物体(Ob)と前記移動体との距離を示す物体情報と、を取得し、取得された前記画像から前記物体の位置を表す点群を取得する情報取得部(211)と、前記物体情報と前記点群とを利用して前記物体が存在するか否かを判定する物体判定部(212)と、前記物体が存在すると判定された場合に、前記移動体の発進を抑制する発進抑制部(214)と、を備え、前記物体判定部は、予め定められた大きさの第1探索領域(ARs1)であって、前記物体情報が示す距離に応じた位置に設定される第1探索領域内に前記点群が含まれる場合に、前記物体が存在すると判定し、前記第1探索領域内に前記点群が含まれない場合であって、前記物体情報が示す距離と新たに前記測距装置により検出された距離との差異が予め定められた閾値以下である場合に、前記移動体から離れる方向に前記第1探索領域よりも拡張された第2探索領域(ARs2)を設定し、前記第2探索領域内に前記点群が含まれる場合に、前記物体が存在すると判定し、前記第1探索領域と、前記第2探索領域とのいずれにおいても前記点群が含まれない場合に、前記物体が存在しないと判定する。
【0007】
この形態の制御装置によれば、画像から取得された点群が第1探索領域に含まれない場合であっても、物体情報が示す距離と新たに測距装置により検出された距離との差異が閾値以下である場合には、第1探索領域よりも拡張された第2探索領域を用いて物体が存在するか否かを判定する。これにより、カメラによる物体検出位置と測距装置による物体検出位置とに差異が生じていても、閾値以下の差異である場合にはかかる差異を許容してカメラと測距装置とを併用した物体検出を実現できるので、物体検出の安定性の低下を抑制できる。
【図面の簡単な説明】
【0008】
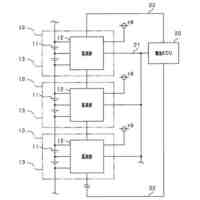
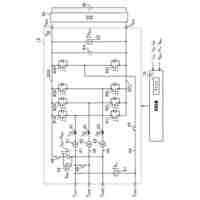
本実施形態の制御装置の概略構成を示すブロック図である。
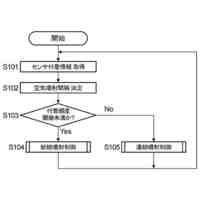
本実施形態の物体認識処理の手順を示すフローチャートである。
本実施形態の情報取得処理の手順を示すフローチャートである。
ステップS170における処理の一例を示す説明図である。
ステップS170における処理の一例を示す説明図である。
本実施形態の物体判定処理の手順を示すフローチャートである。
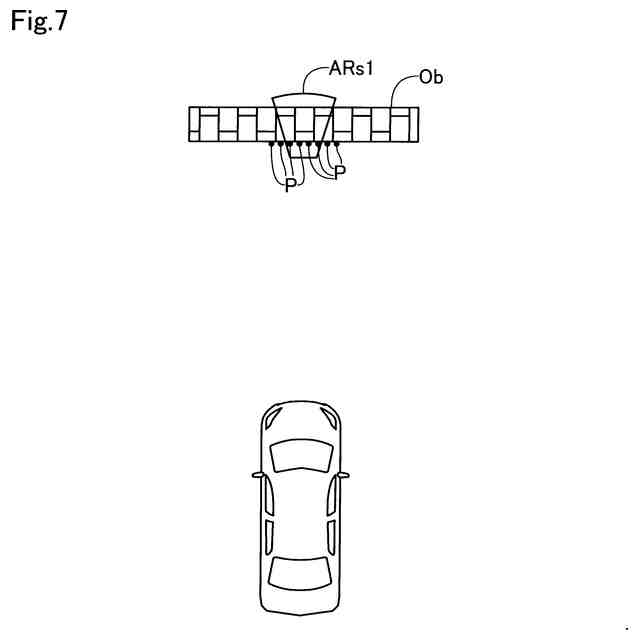
ステップS210における処理の一例を示す説明図である。
物体の検出位置ずれが生じる状況の一例を示す説明図である。
ステップS240における処理の一例を示す説明図である。
本実施形態の情報更新処理の手順を示す説明図である。
本実施形態の発進抑制処理の手順を示す説明図である。
【発明を実施するための形態】
【0009】
A.実施形態:
A-1.装置構成:
図1に示すように、本実施形態では、車両Mは、カメラ110と、測距装置120と、制御装置200とを備える。
【0010】
カメラ110は、車両Mの前方を撮像して画像を取得する。本実施形態では、車両Mは、カメラ110として単眼カメラを備える。なお、車両Mは、カメラ110として、単眼カメラに代えてステレオカメラを備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
固定子
4日前
株式会社デンソー
報知装置
4日前
株式会社デンソー
吸引装置
5日前
株式会社デンソーウェーブ
決済端末
4日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
電子制御装置
4日前
株式会社デンソー
電池監視装置
1日前
株式会社デンソーウェーブ
監視システム
4日前
株式会社デンソー
障害物検出装置
今日
株式会社デンソー
縦型半導体装置
5日前
株式会社デンソー
組電池制御装置
4日前
株式会社デンソー
運行管理システム
6日前
株式会社デンソーウェーブ
位置分析システム
5日前
株式会社デンソー
半導体装置の製造方法
1日前
株式会社デンソー
SiCウェハの製造装置
7日前
株式会社デンソーテン
制御装置および制御方法
1日前
株式会社デンソー
半導体装置とその製造方法
4日前
株式会社デンソーテン
通信装置及び通信システム
6日前
株式会社デンソーテン
画像処理装置及び画像処理方法
6日前
株式会社デンソー
スパークプラグ、及び製造方法
6日前
株式会社デンソーテン
気体噴射装置及び気体噴射方法
1日前
株式会社デンソー
識別情報設定装置及びプログラム
6日前
トヨタ自動車株式会社
異常診断方法
6日前
トヨタ自動車株式会社
電力伝送装置
1日前
トヨタ自動車株式会社
車両減速支援装置
6日前
トヨタ自動車株式会社
衝突被害軽減装置
4日前
株式会社デンソー
接続構造、半導体装置および絶縁内蔵基板
6日前
株式会社デンソー
結線接続構造、ステータ、及び結線接続方法
4日前
株式会社デンソー
空調装置、空調制御装置及び空調制御プログラム
4日前
株式会社SOKEN
電力変換装置、プログラム
6日前
株式会社SOKEN
電力変換装置、プログラム
6日前
株式会社デンソー
温調装置、温調制御装置及び温調制御プログラム
4日前
株式会社デンソー
識別情報設定装置、電池システム及びプログラム
6日前
株式会社SOKEN
電力変換装置、プログラム
6日前
株式会社デンソー
トレンチゲート型のスイッチング素子とその製造方法
6日前
株式会社デンソー
配送支援方法、配送支援システム、配送支援プログラム
4日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ