TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024041473
公報種別
公開特許公報(A)
公開日
2024-03-27
出願番号
2022146307
出願日
2022-09-14
発明の名称
車載通信システムおよび通信ノード
出願人
株式会社デンソー
代理人
名古屋国際弁理士法人
主分類
H04L
41/06 20220101AFI20240319BHJP(電気通信技術)
要約
【課題】通信相手のノードが意図せずスリープ状態に遷移しても当該通信相手のノードを速やかに自ノードとの通信に復帰させることが可能な車載通信システムを提供する。
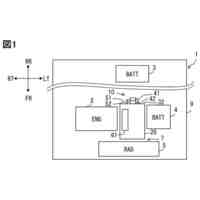
【解決手段】第1ノード10は、当該第1ノード10がスリープ状態であるときに、当該第1ノード10において、他のノードとの通信に起因しない起動要因が発生した場合、第1ノードを起動させる。起動された第1ノード10は、第1通信線4を介して第2ノード20へ、起動要求信号を送信する。第1ノード10はさらに、第2ノード20との間で送信条件が成立した場合、第1通信線4を介して第2ノード20へ起動要求信号を送信する。第2ノード20は、当該第2ノード20がスリープ状態であるときに第1通信線4から起動要求信号を受信すると、起動する。
【選択図】図1
特許請求の範囲
【請求項1】
第1ノード(10)と、
前記第1ノードと第1通信線(4)を介して互いに所定の通信規格に従う通信を行うように構成された第2ノード(20)と、
を備え、
前記第1ノードは、
前記第1ノードがスリープ状態であるときに、前記第1ノードにおいて前記通信に起因しない起動要因が発生したことに応じて、前記第1ノードを起動させるように構成された起動部(S120)と、
前記起動部により前記第1ノードが起動されたことに応じて、前記第1通信線を介して前記第2ノードへ起動要求信号を送信するように構成された第1の送信部(S130)と、
前記第2ノードとの間で、前記起動要求信号を送信すべき送信条件が成立した場合に、前記第1通信線を介して前記第2ノードへ前記起動要求信号を送信するように構成された第2の送信部(S220)と、
を備え、
前記第2ノードは、前記第2ノードがスリープ状態であるときに、前記第1通信線から前記起動要求信号を受信すると、起動するように構成されている、
車載通信システム(2)。
続きを表示(約 2,300 文字)
【請求項2】
請求項1に記載の車載通信システムであって、
さらに、前記第1ノードと第2通信線(5)を介して互いに前記通信を行うように構成された第3ノード(30)を備え、
前記第1ノードの前記第1の送信部は、前記起動部により前記第1ノードが起動されたことに応じて、さらに前記第3ノードへ、前記第2通信線を介して前記起動要求信号を送信するように構成されており、
前記第1ノードの前記第2の送信部は、前記第3ノードとの間で前記送信条件が成立した場合、前記第2通信線を介して前記第3ノードへ前記起動要求信号を送信するように構成されており、
前記第3ノードは、前記第3ノードがスリープ状態であるときに、前記第2通信線から前記起動要求信号を受信すると、起動するように構成されている、
車載通信システム。
【請求項3】
請求項1に記載の車載通信システムであって、
さらに、前記第1ノードと第2通信線(5)を介して互いに前記通信を行うように構成された第3ノード(30)を備え、
前記第2ノードは、前記第1通信線を介して前記第1ノードへ前記起動要求信号を送信可能に構成されており、
前記第1ノードの前記起動部は、前記第1ノードがスリープ状態であるときに、前記第2ノードから前記起動要求信号を受信したことに応じて、前記第1ノードを起動させるように構成されており、
前記第1ノードは、さらに、
前記第2ノードからの前記起動要求信号を受けて起動した場合に、前記第2通信線を介して前記第3ノードへ前記起動要求信号を送信するように構成された第1の転送部(S470)と、
前記第3ノードとの間で前記送信条件が成立した場合に、前記第2通信線を介して前記第3ノードへ前記起動要求信号を送信するように構成された第2の転送部(S470)と、
を備え、
前記第3ノードは、前記第3ノードがスリープ状態であるときに、前記第2通信線から前記起動要求信号を受信すると、起動するように構成されている、
車載通信システム。
【請求項4】
請求項1~請求項3のいずれか1項に記載の車載通信システムであって、
前記送信条件は、周期的に繰り返し到来するように設定された送信タイミングが到来することに応じて成立する、
車載通信システム。
【請求項5】
請求項1に記載の車載通信システムであって、
前記第1ノードは、判断対象ノードが、前記第1ノードと正常に前記通信を行えない通信異常状態であるか否か、を判断するように構成された判断部(S320,S420)を備え、
前記判断対象ノードは、前記第2ノードを含み、
前記第2ノードとの間での前記送信条件は、前記判断部により前記第2ノードが前記通信異常状態であると判断されたことに応じて成立する、
車載通信システム。
【請求項6】
請求項2に記載の車載通信システムであって、
前記第1ノードは、判断対象ノードが、前記第1ノードと正常に前記通信を行えない通信異常状態であるか否か、を判断するように構成された判断部(S320,S420)を備え、
前記判断対象ノードは、前記第2ノード及び前記第3ノードを含み、
前記第2ノードとの間での前記送信条件は、前記判断部により前記第2ノードが前記通信異常状態であると判断されたことに応じて成立し、
前記第3ノードとの間での前記送信条件は、前記判断部により前記第3ノードが前記通信異常状態であると判断されたことに応じて成立する、
車載通信システム。
【請求項7】
請求項3に記載の車載通信システムであって、
前記第2ノードは、判断対象ノードが、前記第1ノードと正常に前記通信を行えない通信異常状態であるか否か、を判断するように構成された判断部を備え、
前記判断対象ノードは、前記第3ノードを含み、
前記第3ノードとの間での前記送信条件は、前記判断部により前記第3ノードが前記通信異常状態であると判断されたことに応じて成立する、
車載通信システム。
【請求項8】
請求項5または請求項6に記載の車載通信システムであって、
前記送信条件は、当該送信条件の成立要件として、さらに、前記第1ノードにおいて前記起動要因が発生し続けていること(S210:YES)を要する、車載通信システム。
【請求項9】
請求項7に記載の車載通信システムであって、
前記送信条件は、当該送信条件の成立要件として、さらに、前記第2ノードが前記第1ノードから起動要求を受けていることを要する、車載通信システム。
【請求項10】
請求項5~請求項8のいずれか1項に記載の車載通信システムであって、
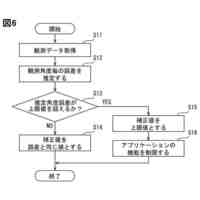
前記判断部は、
前記判断対象ノードへ定期的に規定コマンドを送信し(S310)、
前記規定コマンドに対応した応答データが前記判断対象ノードから適正に受信されなかった場合に、前記判断対象ノードが前記通信異常状態であると判断する(S330)、
ように構成されており、
前記判断対象ノードは、前記第1ノードから前記規定コマンドを受信したことに応じて前記第1ノードへ前記応答データを送信するように構成されている、
車載通信システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両内において複数のノード間で有線通信する技術に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1は、複数のECUを有する車載ネットワークを開示している。この車載ネットワークでは、スリープ状態のECUにおいてウェイクアップすべき条件が成立した場合、当該ECUはウェイクアップする。
【0003】
このような車載ネットワークにおいて、例えば次のような通信プロトコルを採用することが考えられる。即ち、自ノード内で生じた起動要因によってスリープ状態からウェイクアップしたECU(以下、「第1ノード」)が、通信対象の他のECU(以下、「第2ノード」)へウェイクアップを要求することにより第2ノードをウェイクアップさせて当該第2ノードと通信する、という通信プロトコルである。このような通信プロトコルの一例として、いわゆる車載イーサネット(「イーサネット」は登録商標)が知られている。
【先行技術文献】
【特許文献】
【0004】
特許第6337783号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、発明者の詳細な検討の結果、上記のような通信仕様において次のような課題が見出された。即ち、第1ノードからウェイクアップ要求を受けて起動された第2ノードが、通信中であるにもかかわらず例えば何らかの異常その他の要因により再びスリープ状態に遷移することがあり得る。第2ノードがこのような不測の要因でスリープ状態に遷移すると、第1ノードは第2ノードと通信できなくなる。第2ノードの異常が取り除かれて第2ノードが正常状態に復帰したとしても、第2ノードはスリープ状態であることから、第1ノードは依然として第2ノードと通信できない。
【0006】
本開示の1つの局面は、通信中に通信相手のノードが意図せずスリープ状態に遷移しても当該通信相手のノードを速やかにウェイクアップさせて自ノードとの通信に復帰させることが可能な車載通信システムを提供することにある。
【課題を解決するための手段】
【0007】
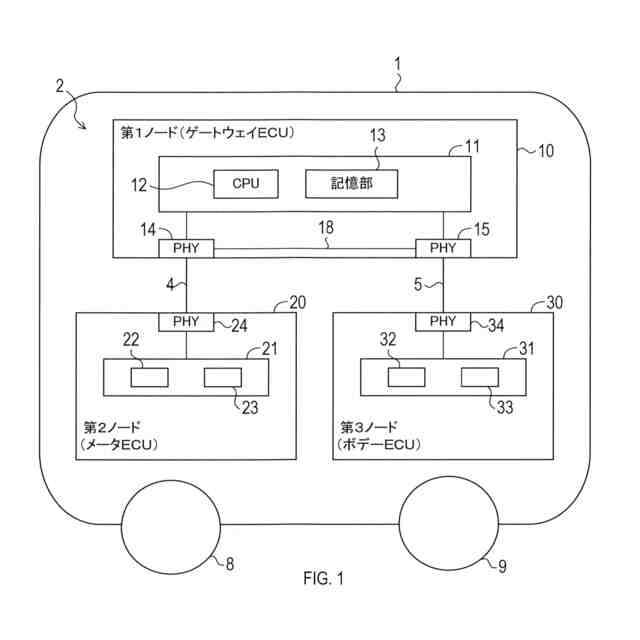
本開示の1つの態様による車載通信システム(2)は、第1ノード(10)と、第2ノード(20)とを備える。第2ノードは、第1ノードと第1通信線(4)を介して互いに接続されている。第1ノードは、第2ノードと、第1通信線を介して、所定の通信規格に従う通信を行う。
【0008】
第1ノードは、起動部(S120)と、第1の送信部(S130)と、第2の送信部(S220)とを備える。起動部は、第1ノードがスリープ状態であるときに、第1ノードにおいて前記通信に起因しない起動要因が発生したことに応じて、第1ノードを起動させる。第1の送信部は、起動部により第1ノードが起動されたことに応じて、第1通信線を介して第2ノードへ、起動要求信号を送信する。第2の送信部は、第2ノードとの間で、起動要求信号を送信すべき送信条件が成立した場合に、第1通信線を介して第2ノードへ起動要求信号を送信する。
【0009】
第2ノードは、当該第2ノードがスリープ状態であるときに、第1通信線から起動要求信号を受信すると、起動する。
このような車載通信システムは、第1ノードが第2ノードを起動させて第2ノードとの通信を行っている間に、第2ノードが何らかの要因で意図せずスリープ状態に遷移したとしても、第2ノードを速やかに起動させて第1ノードとの通信に復帰させることが可能となる。
【図面の簡単な説明】
【0010】
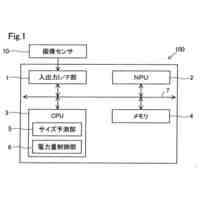
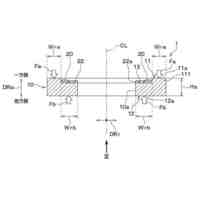
第1実施形態の車載通信システムの概要を示す説明図である。
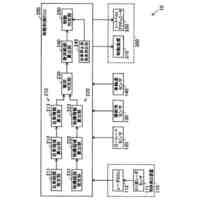
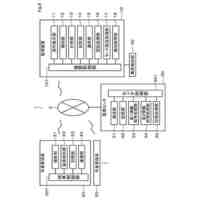
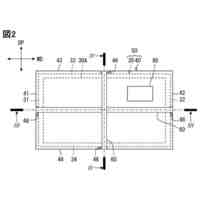
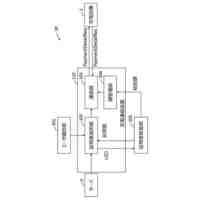
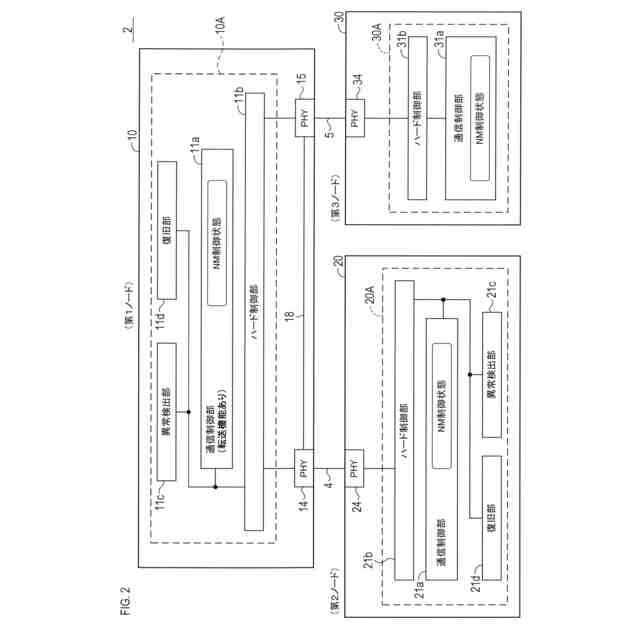
第1実施形態の車載通信システムの具体的構成を示すブロック図である。
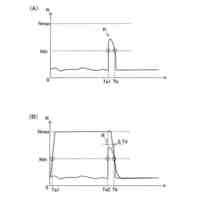
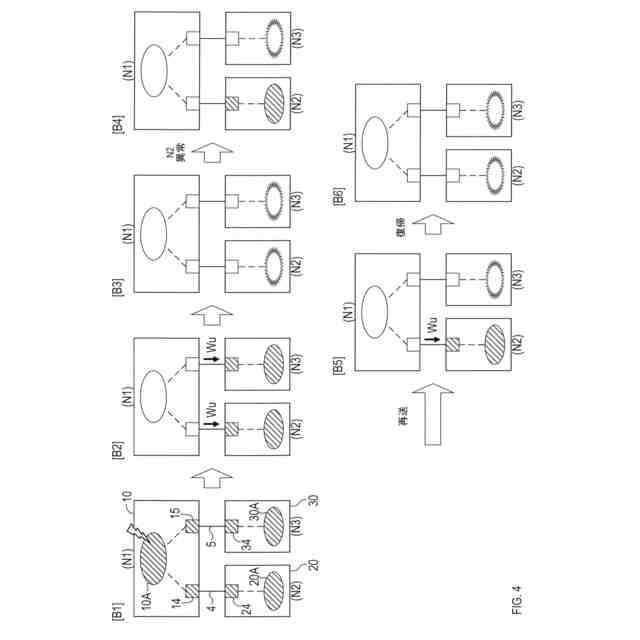
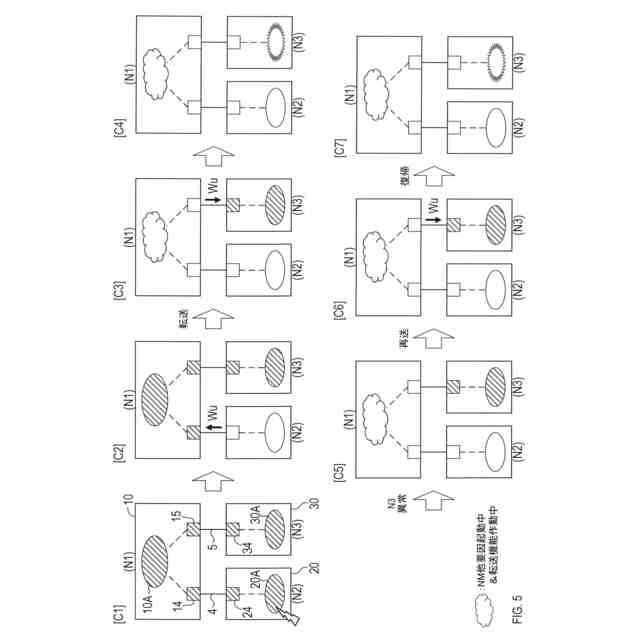
第1実施形態の車載通信システムの第1の動作例を示す説明図である。
第1実施形態の車載通信システムの第2の動作例を示す説明図である。
第1実施形態の車載通信システムの第3の動作例を示す説明図である。
第1実施形態の通信制御処理のフローチャートである。
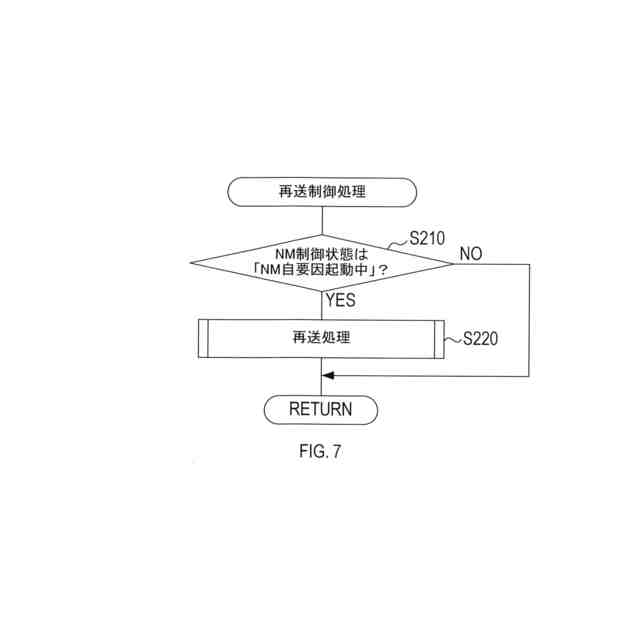
第1実施形態の再送制御処理のフローチャートである。
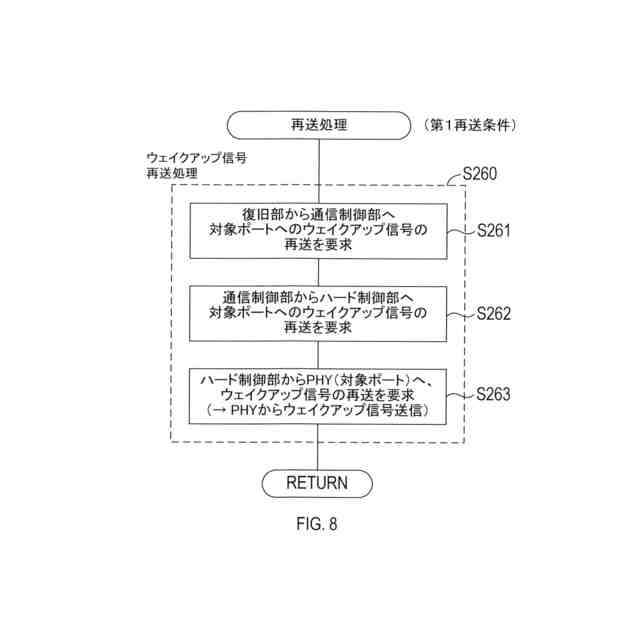
第1実施形態の再送制御処理における再送処理の第1の具体例(第1パターン)を示すフローチャートである。
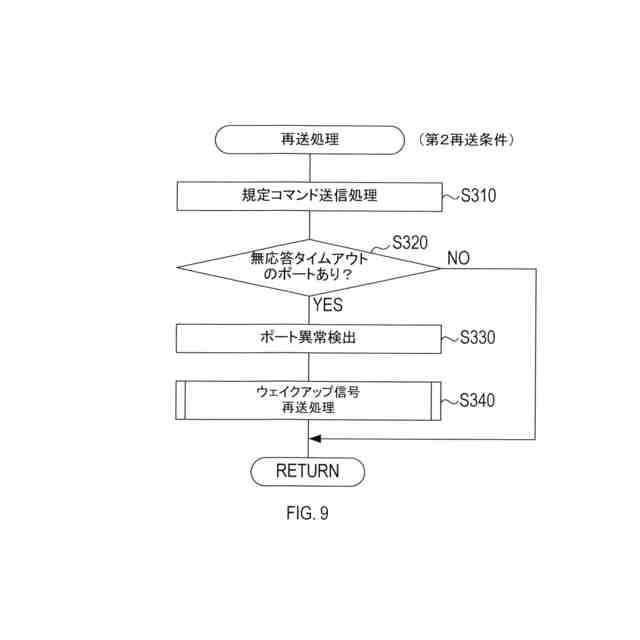
第1実施形態の再送制御処理における再送処理の第2の具体例(第2パターン)を示すフローチャートである。
第1実施形態の再送制御処理における再送処理の第3の具体例(第3パターン)を示すフローチャートである。
第1実施形態の他要因起動処理のフローチャートである。
第1実施形態の中継制御処理のフローチャートである。
第2実施形態の車載通信システムの概要を示す説明図である。
第2実施形態の車載通信システムの具体的構成を示すブロック図である。
第2実施形態の車載通信システムの第1の動作例を示す説明図である。
図15の第1の動作例の一部をより詳細に示す説明図である。
第2実施形態の車載通信システムの第2の動作例を示す説明図である。
第2実施形態の通信制御処理のフローチャートである。
第2実施形態の再送制御処理のフローチャートである。
第2実施形態の再送制御処理における再送処理の第1の具体例(第1パターン)を示すフローチャートである。
第2実施形態の再送制御処理における再送処理の第2の具体例(第2パターン)を示すフローチャートである。
第2実施形態の再送制御処理における再送処理の第3の具体例(第3パターン)を示すフローチャートである。
第2実施形態の他要因起動処理のフローチャートである。
第2実施形態の中継制御処理のフローチャートである。
第2実施形態の転送設定制御処理のフローチャートである。
車載通信システムの変形例を示す説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
変調器
13日前
株式会社デンソー
構造体
4日前
株式会社デンソー
回転電機
6日前
株式会社デンソー
制御装置
24日前
株式会社デンソー
回路基板
14日前
株式会社デンソー
制御装置
24日前
株式会社デンソー
ペダル装置
24日前
株式会社デンソー
半導体装置
5日前
株式会社デンソー
半導体装置
19日前
株式会社デンソー
半導体装置
21日前
株式会社デンソー
半導体装置
27日前
株式会社デンソー
電池監視装置
6日前
株式会社デンソー
反力付与装置
18日前
株式会社デンソー
制動制御装置
11日前
株式会社デンソー
反力付与装置
18日前
株式会社デンソーテン
音響制御装置
6日前
株式会社デンソーテン
音響制御装置
6日前
株式会社デンソーテン
音響制御装置
6日前
株式会社デンソー
反力付与装置
18日前
株式会社デンソー
電流検出装置
6日前
株式会社デンソー
車輪駆動装置
26日前
株式会社デンソー
アクセル装置
18日前
株式会社デンソー
情報処理装置
13日前
株式会社デンソーウェーブ
警備システム
13日前
株式会社デンソーウェーブ
決済システム
14日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
電力変換装置
5日前
株式会社デンソー
力学量センサ
25日前
株式会社デンソーウェーブ
距離計測装置
26日前
株式会社デンソーテン
充電制御装置
26日前
株式会社デンソー
処理システム
14日前
株式会社デンソー
虚像表示装置
4日前
株式会社デンソー
アクセル装置
18日前
株式会社デンソー
アクチュエータ
18日前
株式会社デンソー
熱音響発生装置
21日前
株式会社デンソー
モータ制御装置
5日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ