TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024045896
公報種別
公開特許公報(A)
公開日
2024-04-03
出願番号
2022150976
出願日
2022-09-22
発明の名称
距離計測装置
出願人
株式会社デンソーウェーブ
代理人
個人
,
個人
主分類
G01S
17/14 20200101AFI20240327BHJP(測定;試験)
要約
【課題】霧等の空間浮遊微粒子が存在する環境下においても計測物体までの距離を正確に計測可能な構成を提供する。
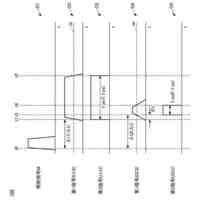
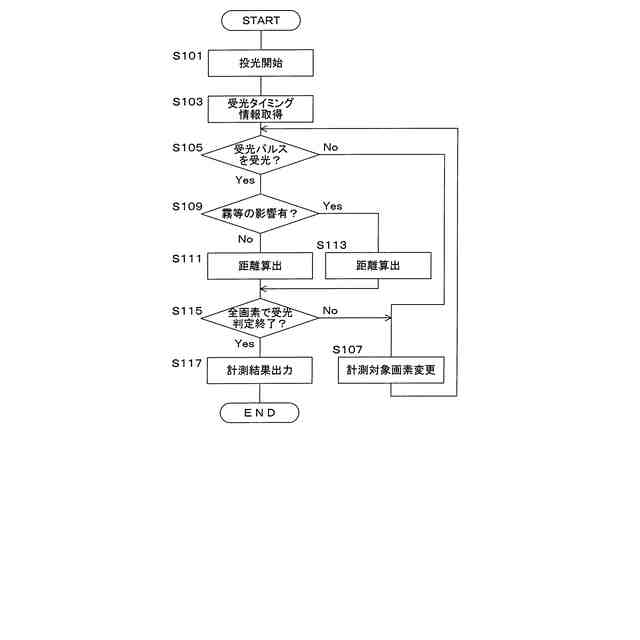
【解決手段】受光部30が備える信号処理部32は、所定数のSPADのうち反射光に応答したSPADの個数(応答素子数N)の変化に応じて生成される応答波形が所定の閾値Nthを超えた後に当該所定の閾値Nth以下となる立下りタイミングTbを画素ごとに検出する。そして、投光部20の投光タイミングと受光部30における画素ごとに求めた受光タイミングとの時間差ΔTに基づいて計測対象領域内での距離計測を行う計測部40は、霧等の影響を受けている場合に、上記受光タイミングを、信号処理部32により検出された立下りタイミングTbからSPADの不感時間ΔTdを減算したタイミングとなるように求める。
【選択図】図4
特許請求の範囲
【請求項1】
所定の計測対象領域に対して所定の投光パルスを投光する投光部と、
1画素を構成する所定数の受光素子が複数配列されてなり、前記投光パルスが前記計測対象領域内の物体で反射した反射光を受光する受光部と、
前記投光部の投光タイミングと前記受光部における画素ごとに求めた受光タイミングとの時間差に基づいて前記計測対象領域内での距離計測を行う計測部と、
を備える距離計測装置であって、
前記受光部は、前記所定数の受光素子のうち前記反射光に応答した受光素子の個数の変化に応じて生成される応答波形が所定の閾値を超えた後に前記所定の閾値以下となる立下りタイミングを画素ごとに検出する信号処理部を備え、
前記計測部は、前記受光タイミングを、前記信号処理部により検出された前記立下りタイミングから前記受光素子の不感時間を減算したタイミングとなるように求めることを特徴とする距離計測装置。
続きを表示(約 1,000 文字)
【請求項2】
前記受光素子は、SPAD(Single Photon Avalanche Diode)であり、
前記受光部は、受光によるブレークダウン(降伏)現象に応じて所定の電圧値から低下した前記SPADへの印加電圧が当該受光中に下げ止まり、受光しなくなることで前記所定の電圧値まで回復するためのパッシブクエンチ回路を有し、
前記計測部は、前記受光タイミングを、前記信号処理部により検出された前記立下りタイミングから前記不感時間及び前記所定の投光パルスの投光パルス幅を減算したタイミングとなるように求めることを特徴とする請求項1に記載の距離計測装置。
【請求項3】
前記計測部は、前記信号処理部により1画素について2以上の立下りタイミングが検出される場合に、最も遅くなる立下りタイミングに基づいて前記受光タイミングを求めることを特徴とする請求項1に記載の距離計測装置。
【請求項4】
前記信号処理部は、前記応答波形が前記所定の閾値を超えた立上がりタイミングを前記立下りタイミングとともに画素ごとに検出し、
前記計測部は、前記立下りタイミングから前記受光素子の不感時間を減算したタイミングと前記立上がりタイミングとの時間差が所定の時間閾値以上となる場合に、前記受光タイミングを前記立下りタイミングから前記受光素子の不感時間を減算したタイミングとなるように求め、前記立下りタイミングから前記受光素子の不感時間を減算したタイミングと前記立上がりタイミングとの時間差が前記所定の時間閾値未満となる場合に、前記受光タイミングを前記立上がりタイミングとなるように求めることを特徴とする請求項1に記載の距離計測装置。
【請求項5】
前記計測部は、前記応答波形の前記立下りタイミングの前後間での傾きが所定の傾き閾値以下となる画素について距離計測を行わないことを特徴とする請求項1に記載の距離計測装置。
【請求項6】
前記受光素子は、SPAD(Single Photon Avalanche Diode)であり、
前記受光部は、受光によるブレークダウン(降伏)現象に応じて所定の電圧値から低下した前記SPADへの印加電圧を当該受光中であっても所定時間後に前記所定の電圧値まで回復させるためのアクティブクエンチ回路を有し、
前記投光部は、光量が徐々に高くなるように前記投光パルスを投光することを特徴とする請求項1に記載の距離計測装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測対象から受光した反射光を利用して計測対象までの距離を計測する距離計測装置に関するものである。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
従来、計測対象領域内の物体から受光した反射光を利用してその物体までの距離を計測する装置として、その物体に照射した光の反射光を検出したタイミング、すなわち、物体までを往復する光の飛行時間(TOF:Time of Flight)を利用する光学式の距離計測装置が採用されている。
【0003】
このような光学式の距離計測装置に関する技術として、例えば、下記特許文献1に開示される光学的測距装置が知られている。この光学的測距装置では、所定数のSPAD(Single Photon Avalanche Diode)がアレイ状に配置されることで光検出器として構成されるSiPM(Silicon Photo Multipliers)をそれぞれ垂直方向にて並列に配置するようにしたTOF計測用光検出器及びノイズ計測用光検出器が採用されている。TOF計測用光検出器では、ハイ状態(High)のSPADの数が所定数以上の場合にレーザ発光時刻からの経過時間が計測されることでヒストグラム(応答波形)が生成され、このヒストグラムにおけるピーク値が所定の閾値以上である場合にピーク位置に対応する時間がヒストグラム回路からTOFとして出力される。その際、予め作成したノイズ平均-閾値変換テーブルを参照して、ノイズ計測用光検出器の検出回路が出力したノイズ平均値に対応する境界レベルがヒストグラム回路の上記所定の閾値として設定されることで、ノイズのレベルに応じて反射光の信号の誤検出率を所定値に維持している。
【先行技術文献】
【特許文献】
【0004】
特開2020-134224号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
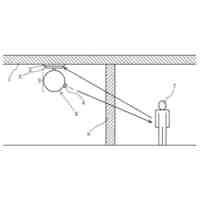
ところで、上述のように、所定数のSPADによって受光部の1画素が構成され、その1画素において計測対象領域内の物体(計測物体)からの反射光に応答しているSPADの個数に応じて生成されるヒストグラム(応答波形)を利用してTOF計測する構成では、霧等の空間浮遊微粒子が存在する環境下において正しく測距できない可能性がある。計測対象領域に対して所定の投光パルスを投光した直後に距離計測装置周辺の霧によって生じた反射光が受光されると、応答しているSPADの個数が投光直後に急増してヒストグラムが飽和してしまう。このような場合、ヒストグラムが所定の閾値を超えた立上がりタイミングを計測物体からの反射光が受光されたタイミングとしてその計測物体までの距離を計測する構成では、投光直後に急増したヒストグラムが上記所定の閾値を超えてしまうことで、計測物体が近距離に存在すると誤計測してしまうという問題がある。
【0006】
本発明は、上述した課題を解決するためになされたものであり、その目的とするところは、霧等の空間浮遊微粒子が存在する環境下においても計測物体までの距離を正確に計測可能な構成を提供することにある。
【課題を解決するための手段】
【0007】
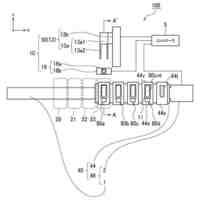
上記目的を達成するため、特許請求の範囲の請求項1に記載の発明は、
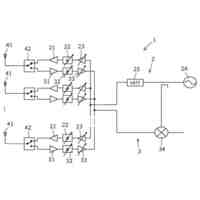
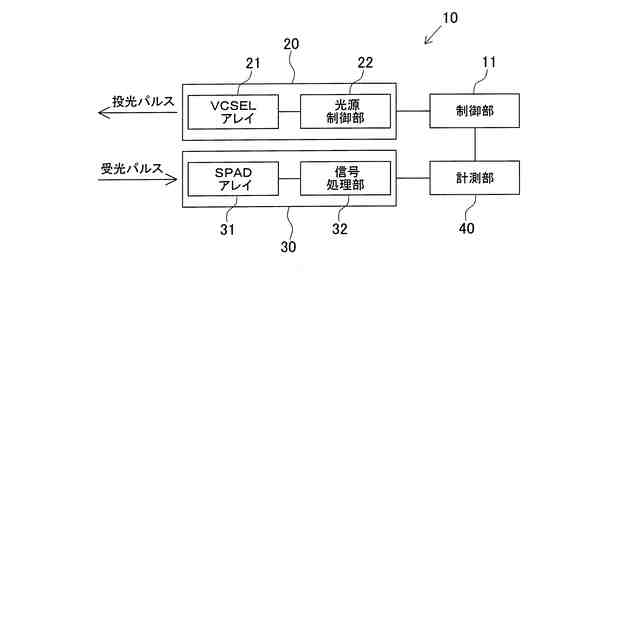
所定の計測対象領域に対して所定の投光パルスを投光する投光部(20)と、
1画素を構成する所定数の受光素子が複数配列されてなり、前記投光パルスが前記計測対象領域内の物体で反射した反射光を受光する受光部(30)と、
前記投光部の投光タイミングと前記受光部における画素ごとに求めた受光タイミングとの時間差に基づいて前記計測対象領域内での距離計測を行う計測部(40)と、
を備える距離計測装置であって、
前記受光部は、前記所定数の受光素子のうち前記反射光に応答した受光素子の個数(N)の変化に応じて生成される応答波形が所定の閾値(Nth)を超えた後に前記所定の閾値以下となる立下りタイミング(Tb)を画素ごとに検出する信号処理部(32)を備え、
前記計測部は、前記受光タイミングを、前記信号処理部により検出された前記立下りタイミングから前記受光素子の不感時間(ΔTd)を減算したタイミングとなるように求めることを特徴とする距離計測装置。
なお、上記各括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【発明の効果】
【0008】
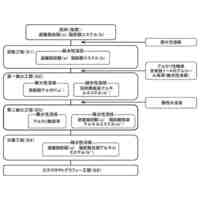
請求項1の発明では、受光部が備える信号処理部は、所定数の受光素子のうち反射光に応答した受光素子の個数の変化に応じて生成される応答波形が所定の閾値を超えた後に当該所定の閾値以下となる立下りタイミングを画素ごとに検出する。そして、投光部の投光タイミングと受光部における画素ごとに求めた受光タイミングとの時間差に基づいて計測対象領域内での距離計測を行う計測部は、上記受光タイミングを、信号処理部により検出された立下りタイミングから受光素子の不感時間を減算したタイミングとなるように求める。
【0009】
霧等の空間浮遊微粒子が存在する環境下において計測物体に対して投光パルスが投光された場合、計測物体よりも遠距離では反射光が発生しないので、応答波形は、霧等の存在によって投光直後に急増するように立上がった後に計測物体までの距離に応じて急減するように立下がって生成される。すなわち、応答波形の立上がりは霧等の影響を受けても、応答波形の立下がりは霧等の影響を受けない。そして、霧等が存在しない場合に計測物体での反射光の受光に応じて生成される応答波形では、所定の閾値を超えた立上がりタイミングとその後に所定の閾値以下となった立下りタイミングとの時間差が受光素子の不感時間に相当する。このため、立下りタイミングから受光素子の不感時間を減算して立上がりタイミングを推定し、この推定した立上がりタイミングとなるように受光タイミングを求めることで、霧等の影響を受けない立下りタイミングを利用して距離計測を行うことができる。したがって、霧等の空間浮遊微粒子が存在する環境下においても計測物体までの距離を正確に計測することができる。
【0010】
請求項2の発明では、受光素子は、SPAD(Single Photon Avalanche Diode)であり、受光部は、受光によるブレークダウン(降伏)現象に応じて所定の電圧値から低下したSPADへの印加電圧が当該受光中に下げ止まり、受光しなくなることで上記所定の電圧値まで回復するためのパッシブクエンチ回路を有する。そして、計測部は、上記受光タイミングを、信号処理部により検出された立下りタイミングから不感時間及び所定の投光パルスの投光パルス幅を減算したタイミングとなるように求める。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
枠部材
2日前
個人
交差点形状表現アルゴリズム
15日前
日本電波工業株式会社
感知センサ
1日前
大和製衡株式会社
組合せ秤
19日前
テクノス株式会社
反射装置
18日前
株式会社SUBARU
車両
1日前
株式会社D.O.N
人感装置
19日前
個人
多元作用力検出機能性締結金具
8日前
日本無線株式会社
レーダ装置
8日前
住江織物株式会社
排尿検知システム
3日前
エイブリック株式会社
半導体装置。
19日前
月島食品工業株式会社
分析方法
18日前
中国電力株式会社
不良碍子検出装置
18日前
ローム株式会社
磁気検出装置
17日前
ミツミ電機株式会社
測距装置
17日前
株式会社大林組
風速再現装置
19日前
ヤマハ株式会社
歪センサ装置
19日前
株式会社昭和測器
ロードセル
17日前
株式会社 キョーワ
食品秤量搬送装置
2日前
サンコール株式会社
電流検出器
18日前
サンコール株式会社
電流検出器
18日前
株式会社ビードットメディカル
計測装置
1日前
キヤノン株式会社
検査装置及び検査方法
2日前
株式会社デンソーウェーブ
携帯端末
17日前
トヨタ自動車株式会社
回路基板の検査方法
3日前
バイオニクス株式会社
光学測定装置
9日前
住友金属鉱山株式会社
異物検査装置
1日前
株式会社イシダ
X線検査装置
17日前
東海電子株式会社
電子機器およびプログラム
10日前
北川工業株式会社
測色装置
17日前
株式会社東芝
センサ及び電子装置
10日前
株式会社寺岡精工
計量装置、システム
18日前
株式会社バンダイ
検査プログラム及び検査システム
2日前
NTN株式会社
ワークの寸法取得方法
1日前
日本特殊陶業株式会社
センサの取付構造
4日前
日産自動車株式会社
ナビゲーション装置
4日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ