TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024096461
公報種別
公開特許公報(A)
公開日
2024-07-12
出願番号
2024078245
出願日
2024-05-13
発明の名称
交差点形状表現アルゴリズム
出願人
個人
代理人
主分類
G01C
21/32 20060101AFI20240705BHJP(測定;試験)
要約
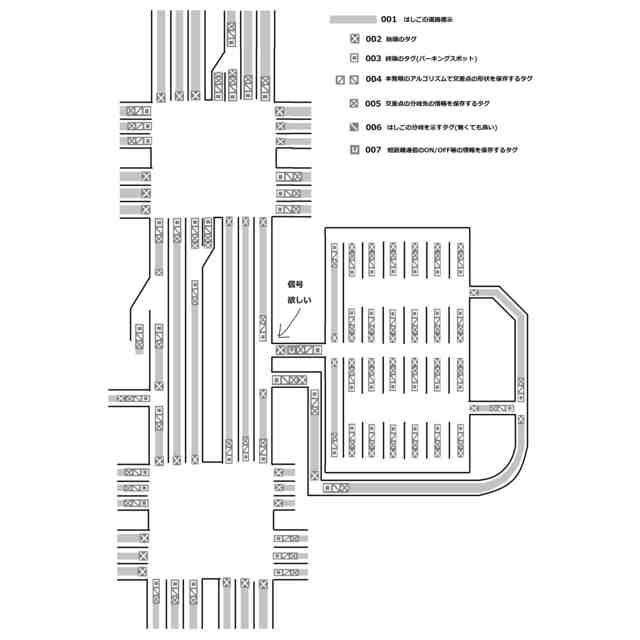
【課題】自動運転車が交差点形状や交差点上のシンボルを適切に認識できるようにするための交差点表現アルゴリズムを提供する。
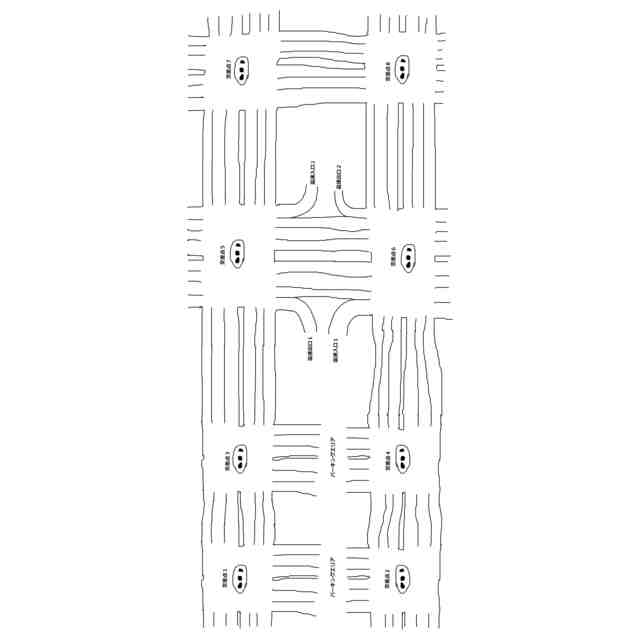
【解決手段】縦横高さ25cmの立方体を交差点の基準点(はしごの道路標示の終端のふみさん)から転がしていき、できあがる閉ループを交差点形状とし、その場でくるくると立方体が何回転かすることでシンボルの存在を表現するアルゴリズムを利用する。
【選択図】図1
特許請求の範囲
【請求項1】
1点から見た交差点の形状を保存するアルゴリズムであって、
前記保存とは、
1次元コードや、2次元のコードや、タグや、ハードディスクや、SSDや、ROMや、RAMといった、情報を保存できる媒体に情報を蓄えることを特徴とし、
前記交差点とは、
交差点とは、道路の交わる部分や、道路の行き止まり(袋小路)の先の部分や、横断歩道といった道路と歩道の交わる部分や、歩道を挟んで道路の交わる部分や、道路の合流地点や、道路の分岐地点や、急な曲がり角や、ビルの壁や、部屋の天井といった、道の接続部であることを特徴とし、
前記アルゴリズムとは、
交差点の1点に置かれた、一定サイズの立方体を、鉛直上側から突き刺すZ軸を中心とするその場での回転方向か、回転移動方向か、平行移動方向の中の、いずれか2方向で1ビットの情報を持つ、前記2方向の中から、好きな方向に、90度ずつ、立方体を回転移動または平行移動させていき、前記立方体が通過した部分でできた閉ループを、前記交差点の形状とすることと、
同じ方向に複数回、前記回転方向または回転移動方向または平行移動させることで同じ位置同じ姿勢に戻ることを利用して、横断歩道などの交差点に存在するオブジェクトの位置を表現することを特徴とする、交差点の形状を保存するアルゴリズム。
続きを表示(約 100 文字)
【請求項2】
前記平行移動方向のみで構成される1bitの場合、常に転がった方向を前といった、一方向と定義しなおし続けるという特徴を有する請求項1に記載の
交差点の形状を保存するアルゴリズム。
発明の詳細な説明
【技術分野】
【0001】
本発明は市街地の自動運転と自動バレー駐車に応用可能な交差点形状保存アルゴリズムに関する。
続きを表示(約 4,400 文字)
【背景技術】
【0002】
従来のはしごの道路標示の発明の説明を見ただけだと、説明不足で自動運転車が実現できない可能性が有る。
日本一多くに分岐している交差点は菅原橋交差点で、11叉路になっている。そのため、Uターンする道を含めて、道は11に分岐しているものとして考える。
世界一車線数の多い道路は8車線である。
日本一大きい交差点は箱堤交差点であり、とても大きい。
従来通りの、線の長さと角度と幅を利用した情報で交差点の形状を表現しようとすると、2000ビット程度必要となる。
QRコード(QRコードは(株)デンソーウェーブの登録商標です)のバージョン8の誤り訂正レベルHの保存できるバイナリの最大長は84byte(672bit)までである。
道路は一車線あたり約2.5m程度である。また、25cmずつサイズが変化する。
本発明で登場するRFIDは5m程度の通信距離が必要で、ユーザメモリ容量は1500bit程度を想定しています。動作温度は路面温度の範囲を想定しています。
【0003】
ーーーーーーーーーー
(重要)交差点とは、道路の交わる部分や、道路の行き止まり(袋小路)の先の部分や、横断歩道といった道路と歩道の交わる部分や、歩道を挟んで道路の交わる部分や、道路の合流地点や、道路の分岐地点や、急な曲がり角や、ビルの壁や、部屋の天井といった、道の接続部である。
ーーーーーーーーーー
常識的には違うが、本発明の中では、駐車場の駐車スペースが複数ある行き止まりは交差点である。また、横断歩道は交差点の一部である。
【先行技術文献】
【特許文献】
【0004】
特願2022-195491
特願2023-91455
特願2023-91456
特願2023-130625
特願2023-151777
特願2023-208096
意願2023-025713
意願2023-025714
意願2023-026595
特願2024-008905
【非特許文献】
【0005】
なし
【発明の概要】
【発明が解決しようとする課題】
【0006】
従来のはしごの道路標示を通常使用する上での問題点として、交差点の形状をどのように表現するかという問題がある。
自動運転車に交差点の形状を伝える場合に、道路の幅や高さや長さや曲率半径等を伝えていると膨大なデータになってしまう。小数を扱う場合、とてもデータの容量が大きくなる。そこで、圧縮以外の方法で、とにかくデータ容量の少ない交差点表現アルゴリズムを考える。さらに、歩道の場所やパーキングスポットの場所も表現したい。本発明では交差点上に存在するものをなるべく少ないデータで表現する。
ついでで本資料は以下の要点に絞って自動運転車を制作する場合に困る点と解決法を記載しています。波線で区切られた範囲がひと固まりです。
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
・高速道路の急なカーブをほぼ100%安全に自動走行させる方法について
・はしごの具体的な利用方法について
・ルールを改正しないといけない部分
・どか雪対策について
・車両の下につけるセンサの汚れ防止装置
・アイスバーン対策について
・はしごの色について
・はしごの幅について
・はしごの終端のQRコードについて
・はしごの道路標示の整備費用はどこから捻出するのか
・はしごの分岐と交差点について
・交差点のQRコードについて
・目的地について
・横断歩道等のその他の道路標示について
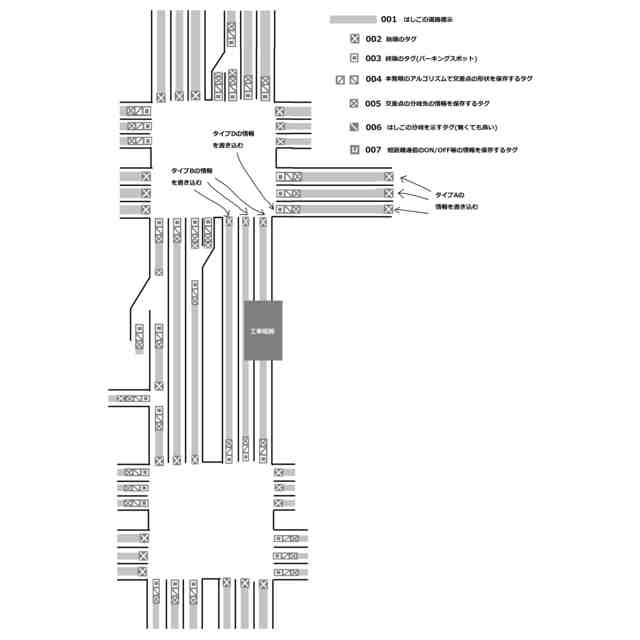
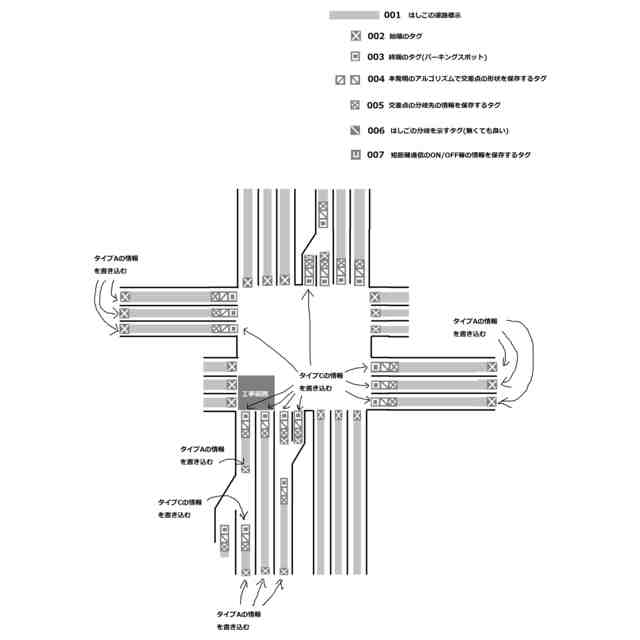
・交差点前に設置するQRコードの内容について
・交差点形状を示すQRコードの方向補正について
・車線変更について
・工事について
・すれ違いについて
・道路のマンホールについて
・グレーチングについて
・信号の認識について
・高速の入り口について
・自動運転車だと周りから判別する方法
・高速から近くのパーキングエリアまでの運転について
・マルチコプターについて
・実証実験のおおよその流れの例について
・3次元のQRコードについて
・DNNの必要な場面
・QRコードではなくRFIDにて実装する場合について
・QRコードやRFID読み取り装置のONOFFについて
・自動倉庫との連携について
・総括
ーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーーー
【0007】
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
・高速道路の急なカーブをほぼ100%安全に自動走行させる方法について
道路の中央に塗料の線を引いて、それをライントレースする方式の自動運転車にします。その方式の場合、ラインを既存の手動運転車と共存できるような線にする必要があります。
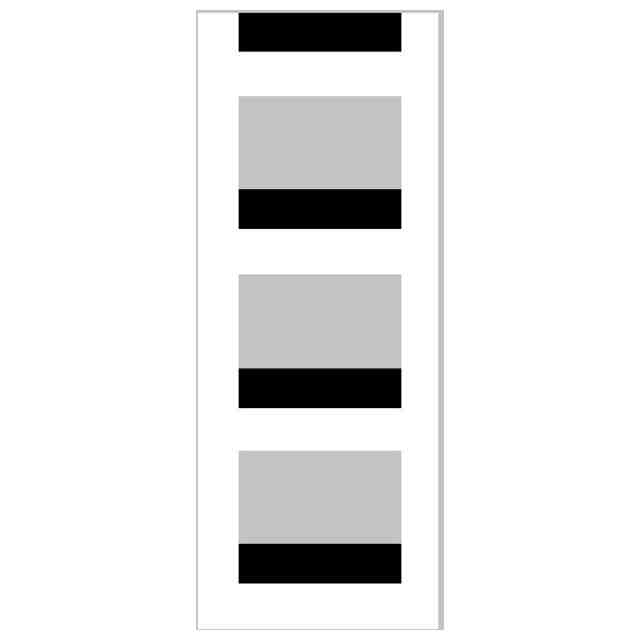
解決方法としては、「ふみさんが2色以上のはしごを道路の中央に引く」ことで、手動運転車の走行の邪魔にならずに、自動運転者でライントレースする事ができます。1色の場合、ゼブラゾーン(導流体)との区別が付きにくいため、ふみさんを2色としています。また、はしごのふみさんの間隔を制限速度とすることで、カーブといった部分での速度を自動で落とすことができます。
本資料の方式でライントレースを行う場合は、従来の画像処理のように道路の形状を認識する必要がなく、急なカーブでも事故になる可能性が低いです。
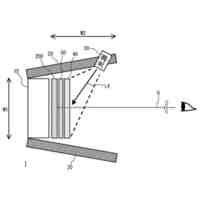
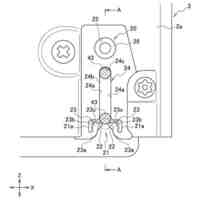
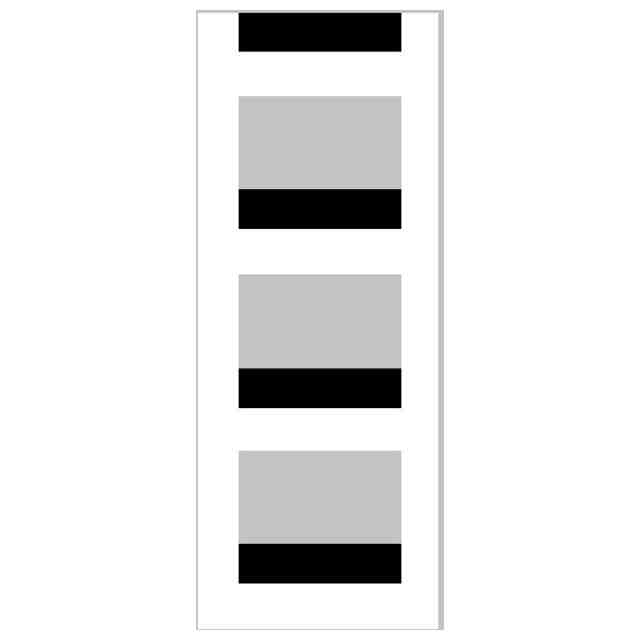
例として図1のようなはしごを道路に描きます。ふみさんとは図1の横棒のことです。また、穴の開いた橋やグレーチング等は、板とはしごのシートを貼ることで解決できます。また、ちょっとぐらいなら、途切れてもライントレースには大きな問題はありません。グレーチングについては後述します。
【0008】
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
・はしごの具体的な利用方法について
ーー読み取りについてーー
はしごの読み取りは車両の下側に取り付けたラインカメラで行います。従来の自動運転車は通常のカメラやライダー等で行いますが、本資料の方式であれば、ラインカメラでおこなうため、制御周期がとても短く、時速300km/hで走行しても線を読み取る性能が十分にあります。
現在は時速300km/hで追従走行する技術がありますが、カーブで前方車両を見失ったりするといった危険があります。そこで、走行自体はライントレースで行い、車間距離の維持だけ気にすれば、現在の技術で理論上は300km/hの安全な自動運転ができます。(カーブでは安全な速度に落とす)
ーー実施についてーー
はしごを道路上に記入し、縦棒の間を透明な塗料で上から塗ります。そして乾く前にガラスシードやアクリルシードといった透明な粒を撒いて、縦棒の間を透明な塗料で重ね塗りします。自衛隊等でも滑り止めとして利用されている方法であり、バイクではしごの上を通っても問題ないようにできます。また、難しいですが、はしごの道路標示の上だけを重ね塗りする方法もあります。
ーーはしごの保守についてーー
はしごの近くを車が通るとはしごの外側から削れていきます。削れるとはしごの幅が狭くなります。はしごの外側から削られるため、はしごの幅が短くなったら塗りなおしで問題無いです。
また、はしごの縦棒の内側と外側で高さが違うので、薄くなったかどうか検知も理論上は可能です。
ーー雪以外の天気についてーー
車両の下側にセンサがついているため、日没や雨でも線を見失いません。前方が砂嵐で何も見えなくても道路だけなら走行できます。
【0009】
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
・ルールを改正しないといけない部分
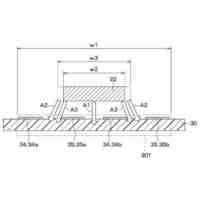
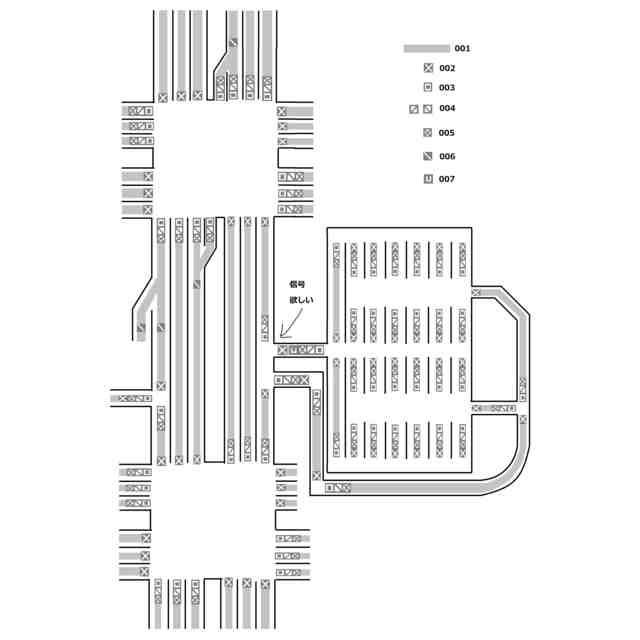
はしごの道路標示と干渉するものが1つ有ります。それは、ダイヤマークです。ダイヤマークだけは法律で道路標示にしないといけません。それ以外の干渉するものは全て道路標識に変更できます。
そのため、幅1m程度のはしごの中に描けるダイヤマークもダイヤマークとして認めてもらわなければいけません。はしごの道路標示は真ん中に切れ目を入れても良いので、幅80cm、長さ80cm程度のダイヤマークをダイヤマークとして認めてもらう必要があります。
止まれの道路標示等は、緑色の塗料等ではしごの道路標示の下に重ねて記載すれば問題無いです。看板だけでは分かりにくい場合は、はしごの道路標示の下に別の色で重ねて道路標示を記載します。
高速道路と、高速道路の出口からパーキングスポットまでの横断歩道を無くすことも可能です。そのため、高速道路とその出口近くを自動運転する場合は、ダイヤマークとは干渉しません。
図3のようにはしごの道路標示の間にダイヤマークを入れられるようにルール改正する必要が有ります。また、ひし形のQRコードがあって、はしごの道路標示の内側にひし形のQRコードを見つけたら、徐行するというプログラムにしても良いと思われます。
あと、車の下にラインカメラを付けても良いのかといった、法律に則った車の改造は一切分かりません。
【0010】
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
・どか雪対策について
自動運転車の前に除雪車を走らせ、道路についた雪を根元から全て除雪します。一般的に下手な人の行う除雪です。しかし、それで十分です。大雪が降るたびに透明な塗料を適当にかけ直せば保守はできます。
除雪車は、除雪して新たに見えるようになった部分のはしごの道路標示を読み取ってさらに除雪できるため、除雪車自身も自動運転車にできます。一番良いのは自動運転車に除雪機能を付けることですが、コストなどを考えて現実的となるのは、除雪車と一緒に走らせて、自動運転車には簡単な除雪用アタッチメントを付けるぐらいでしょうか。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流センサ
2日前
個人
検出体内蔵型荷重計測盤
4日前
株式会社ニフコ
保持構造
2日前
中国電力株式会社
測定端子
2日前
株式会社SUBARU
車両
9日前
日本電波工業株式会社
感知センサ
9日前
日本碍子株式会社
ガスセンサ
5日前
日本碍子株式会社
ガスセンサ
5日前
中国電力株式会社
漏水測定装置
4日前
個人
重量測定装置
4日前
株式会社ビードットメディカル
計測装置
9日前
本田技研工業株式会社
車載検出器
4日前
矢崎総業株式会社
車両用表示装置
6日前
本田技研工業株式会社
外界認識装置
4日前
株式会社デンソー
光学センサ
5日前
住友金属鉱山株式会社
異物検査装置
9日前
清水建設株式会社
孔壁測定方法
2日前
NTN株式会社
ワークの寸法取得方法
9日前
ローム株式会社
MEMSデバイス
6日前
株式会社デンソーウェーブ
三次元計測装置
5日前
個人
ニンヒドリン反応速度を用いたアミノ酸の定量方法
5日前
キヤノン株式会社
光学装置及び移動体
4日前
富士電機株式会社
増幅回路及び超音波流量計
4日前
キヤノン株式会社
光電変換装置
5日前
長崎県
光散乱体の非破壊測定装置
9日前
古河電工産業電線株式会社
サイロ測温ケーブル
6日前
日本無線株式会社
物標探知装置および探知画像処理方法
3日前
矢崎エナジーシステム株式会社
ガスメータ
2日前
三菱電機株式会社
電流センサ装置
9日前
株式会社東芝
アンテナ装置及びレーダシステム
5日前
株式会社デンソー
位置検出装置
5日前
公益財団法人鉄道総合技術研究所
レールの健全度評価方法
2日前
マークテック株式会社
探傷装置及び探傷方法
9日前
日立Astemo株式会社
疑似障害物運搬装置
9日前
NECネットワーク・センサ株式会社
投下式ソナー
9日前
シスメックス株式会社
検体測定装置及び検体測定方法
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ