TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024102522
公報種別
公開特許公報(A)
公開日
2024-07-31
出願番号
2023006462
出願日
2023-01-19
発明の名称
車載検出器
出願人
本田技研工業株式会社
代理人
個人
,
個人
主分類
G01S
17/894 20200101AFI20240724BHJP(測定;試験)
要約
【課題】車両周囲の外界状況を認識する処理の負荷を軽減すること。
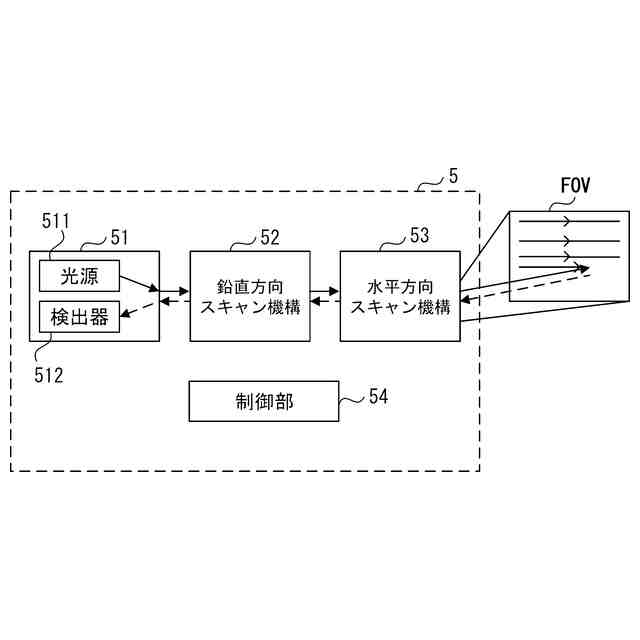
【解決手段】自車両の周囲に電磁波を走査照射して外界状況を検出する車載検出器5は、モータを用いた第1の方式により電磁波を第1の方向に走査照射する第1の走査部53と、モータを用いない第2の方式により電磁波を第1の方向と交差する第2の方向に走査照射する第2の走査部52と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
自車両の周囲に電磁波を走査照射して外界状況を検出する車載検出器であって、
モータを用いた第1の方式により前記電磁波を第1の方向に走査照射する第1の走査部と、
前記モータを用いない第2の方式により前記電磁波を前記第1の方向と交差する第2の方向に走査照射する第2の走査部と、
を備えることを特徴とする車載検出器。
続きを表示(約 770 文字)
【請求項2】
請求項1に記載の車載検出器において、
前記第1の走査部は、前記電磁波を前記第1の方向としての水平方向に走査照射し、
前記第2の走査部は、前記電磁波を前記第2の方向としての鉛直方向に走査照射し、
前記電磁波を走査照射する際、前記第2の走査部による前記第2の方向の走査ピッチを可変制御する制御部をさらに備えることを特徴とする車載検出器。
【請求項3】
請求項2に記載の車載検出器において、
前記制御部は、前記電磁波の照射位置が前記自車両から遠くなるほど前記第2の方向の走査ピッチを密に設定することを特徴とする車載検出器。
【請求項4】
請求項3に記載の車載検出器において、
前記制御部は、前記電磁波の照射位置が前記自車両で走行する道路の路面から高くなるほど前記第2の方向の走査ピッチを粗く設定することを特徴とする車載検出器。
【請求項5】
請求項3に記載の車載検出器において、
前記制御部は、前記電磁波の照射位置が前記自車両から近くなるほど前記第2の方向の走査ピッチを粗く設定することを特徴とする車載検出器。
【請求項6】
請求項2に記載の車載検出器において、
前記自車両で走行する道路の路面勾配を検出する勾配検出部をさらに備え、
前記制御部は、前記路面勾配に応じて前記第2の方向の走査ピッチの粗密を設定することを特徴とする車載検出器。
【請求項7】
請求項1から6のいずれか一項に記載の車載検出器において、
前記車載検出器は、前記自車両で走行する道路を走行する先行車両または前記道路の路面に存在する障害物を前記外界状況として検出することを特徴とする車載検出器。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物体の検知や物体までの距離等を計測する車載検出器に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
自動運転技術を支えるキーデバイスとしてLiDAR(Light Detection And Ranging)が知られている。ライダは、照射するレーザ光の照射角度を二軸方向にそれぞれ変化させてスキャンを行い、各検出点の位置情報に基づいて物体の検知や物体までの距離等を計測する。ライダは、そのスキャン方式により機械式とソリッドステート(solid state)式とに大別される。機械式は、例えばポリゴンミラーやガルバノミラー等を駆動してレーザの照射方向を制御する。ソリッドステート式は、ソリッドステートタイプの素子を用いてレーザの照射方向を制御する。後者の例として、液晶パネルおよび偏光回析フィルムを多層化したソリッドステートスキャナー技術が実現されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/065975号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では車載検出器としてのニーズ(例えば、コスト、スキャン速度および視野角(Field of View))をバランスよく実現することが難しい。
【課題を解決するための手段】
【0005】
本発明の一態様である車載検出器は、自車両の周囲に電磁波を走査照射して外界状況を検出する車載検出器であって、モータを用いた第1の方式により電磁波を第1の方向に走査照射する第1の走査部と、モータを用いない第2の方式により電磁波を第1の方向と交差する第2の方向に走査照射する第2の走査部と、を備える。
【発明の効果】
【0006】
本発明によれば、車載検出器としてのニーズをバランスよく実現することが可能になる。
【図面の簡単な説明】
【0007】
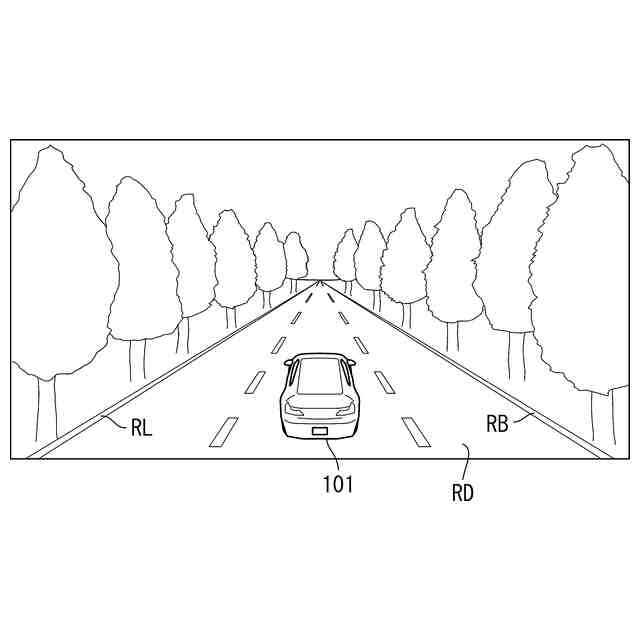
車両が道路を走行する様子を示す図。
ライダによる検出データの一例を示す模式図。
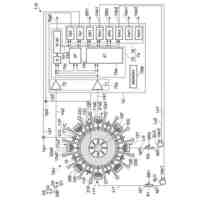
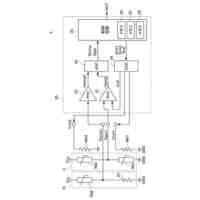
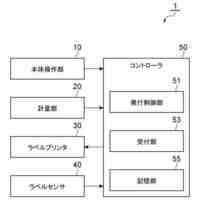
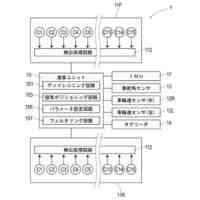
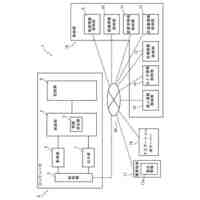
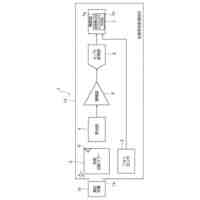
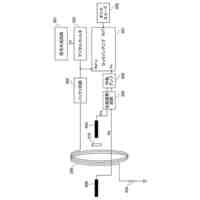
車両制御装置の要部構成を概略的に示すブロック図。
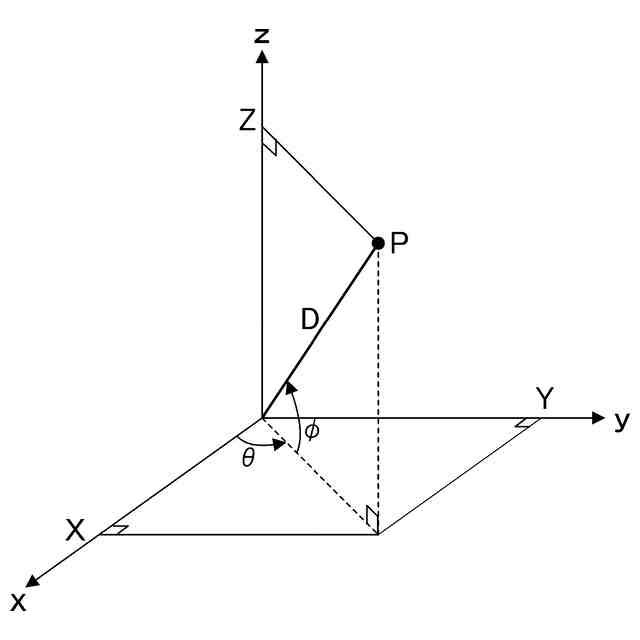
3次元座標系を用いて3次元空間の点群データの位置を表す図。
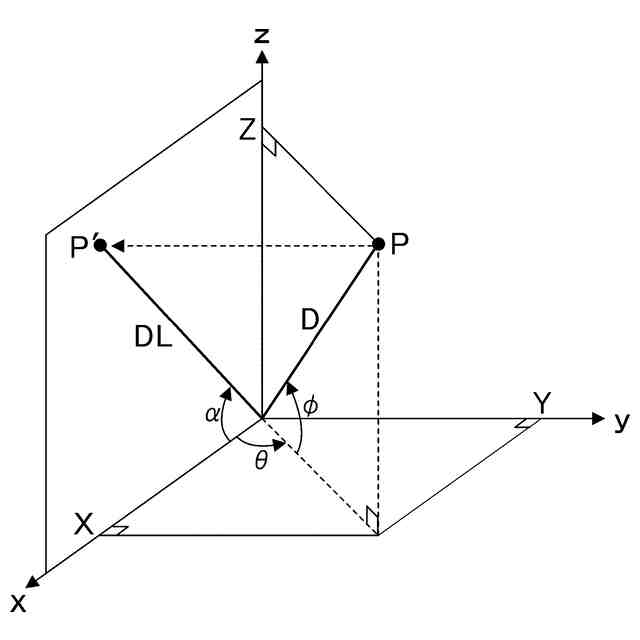
3次元空間から2次元のX-Z空間への点群データの写像を説明する図。
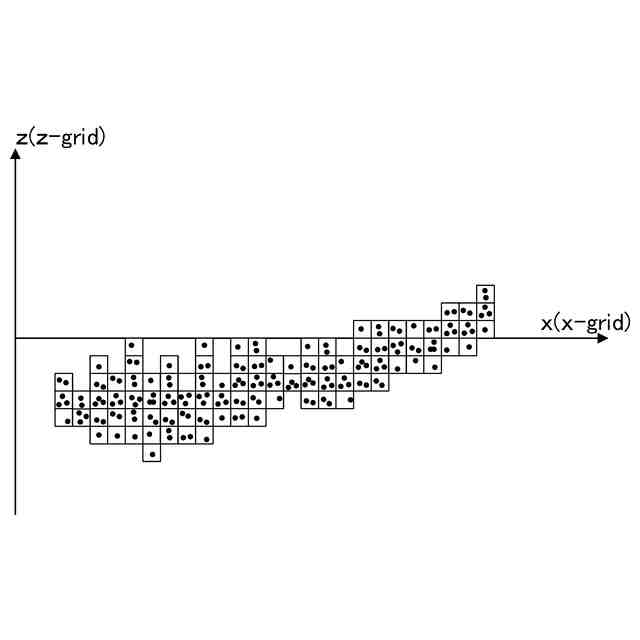
グリッド別に分けられた点群データを示す模式図。
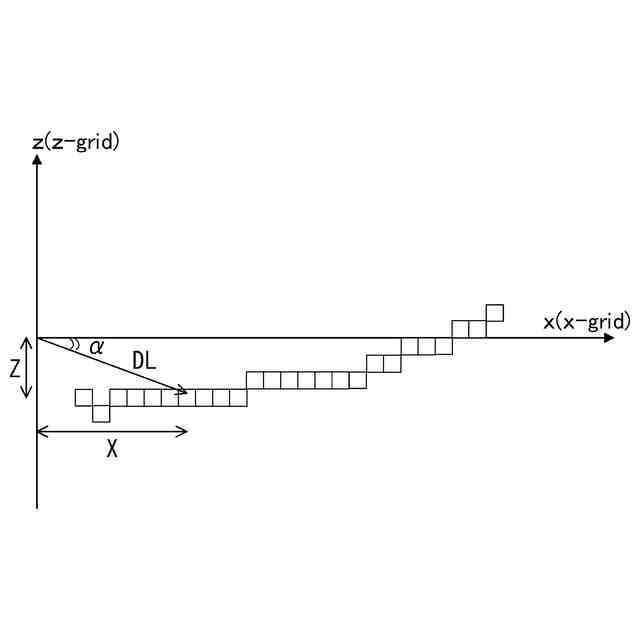
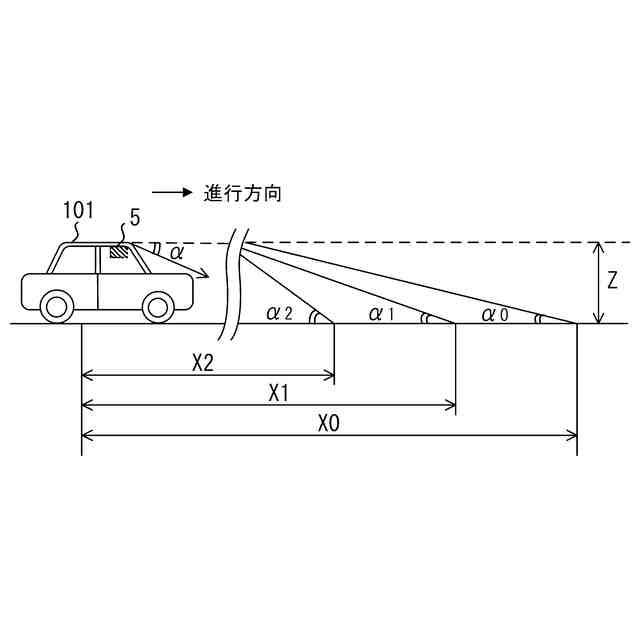
奥行距離方向の路面勾配を示す模式図。
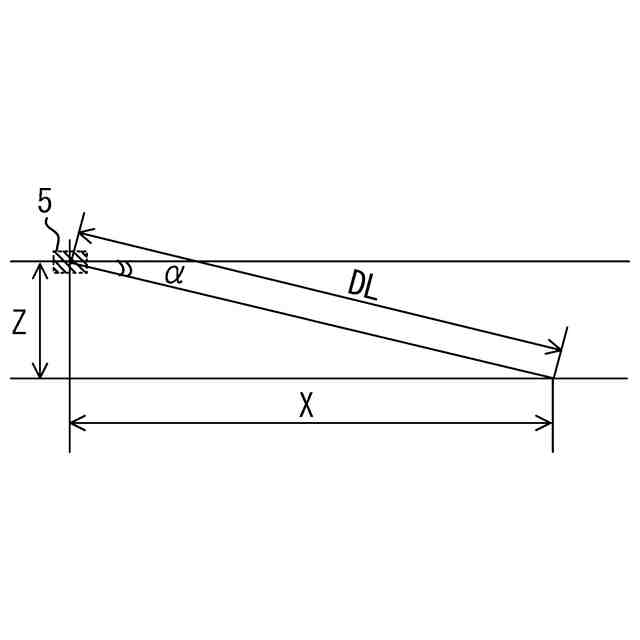
投光角度と奥行距離を示す模式図。
ライダで計測される距離を示す模式図。
奥行距離と鉛直方向の投光角度との関係の一例を示す模式図。
奥行距離と鉛直方向の角度分解能との関係の一例を示す模式図。
ライダの照射光がラスタ走査方式で照射される場合の照射点の一例を示す模式図。
ライダの照射光が検出領域内に格子状に配列した所定の格子点にのみ照射される場合の照射点の一例を示す模式図。
図6Bに例示した照射点へ照射光を照射する場合の照射順の一例を示す図。
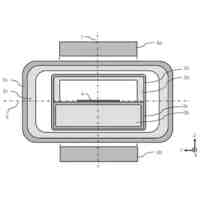
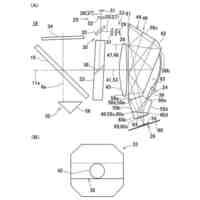
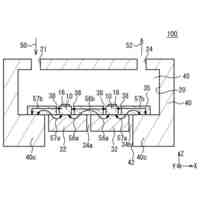
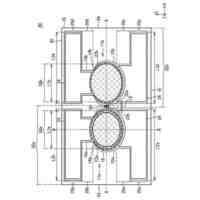
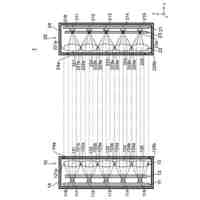
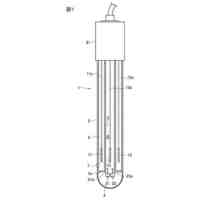
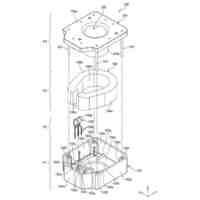
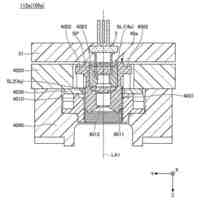
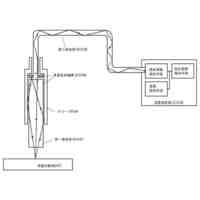
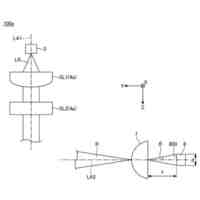
ライダの構成を例示する模式図。
図2のコントローラのCPUで実行される処理の一例を示すフローチャート。
図9のS20の処理を説明するフローチャート。
【発明を実施するための形態】
【0008】
以下に、図面を参照して発明の実施の形態について説明する。
はじめに、発明の実施の形態に係るライダ装置(以下、ライダと呼ぶ)を用いた外界認識装置およびこの外界認識装置を搭載する車両について説明する。
外界認識装置は、自動運転機能を有する車両、すなわち自動運転車両に搭載することができる。なお、実施の形態では、外界認識装置が搭載される車両を、他車両と区別して自車両と呼ぶことがある。自車両は、内燃機関(エンジン)を走行駆動源として有するエンジン車両、走行モータを走行駆動源として有する電気自動車、エンジンと走行モータとを走行駆動源として有するハイブリッド車両のいずれであってもよい。自車両は、ドライバによる運転操作が不要な自動運転モードでの走行だけでなく、ドライバの運転操作による手動運転モードでの走行も可能である。
【0009】
自動運転車両は、自動運転モードでの走行(以下、自動走行または自律走行と呼ぶ)時に、ライダやカメラ等の車載検出器の検出データに基づき自車両の周囲の外界状況を認識する。自動運転車両は、その認識結果に基づいて、現時点から所定時間より先の走行軌道(目標軌道)を生成し、目標軌道に沿って自車両が走行するように走行用アクチュエータを制御する。
【0010】
図1Aは、自動運転車両である自車両101が道路RDを走行する様子を示す図である。図1Bは、自車両101に搭載され、自車両101の進行方向に向けられたライダにより得られた検出データの一例を示す模式図である。ライダによる計測点(検出点と呼んでもよい)は、照射したレーザが物体の表面のある1点で反射して戻ってくる点情報である。点情報は、レーザ源からその点までの距離と、反射して戻ってきたレーザの強度と、レーザ源とその点との相対速度とを含む。また、図1Bに示すような複数の検出点で構成されるデータを、点群データと呼ぶ。図1Bには、図1Aの物体のうち、ライダの視野(Field of view;以下FOVと呼ぶ)に含まれる物体の表面の検出点に基づく点群データが示されている。FOVは、例えば、自車両101の水平方向(道路幅方向と呼んでもよい)に120 deg、鉛直方向(上下方向と呼んでもよい)に40 degとしてもよい。FOVの値は、外界認識装置の仕様に基づいて適宜変更して構わない。自車両101は、図1Bに示すような点群データに基づいて車両周囲の外界状況、より具体的には車両周囲の道路構造および物体等を認識し、その認識結果に基づいて目標軌道を生成する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社IFG
単板試験器
21日前
株式会社トプコン
測量装置
12日前
太陽誘電株式会社
検出装置
今日
株式会社トプコン
測量装置
12日前
エイブリック株式会社
半導体装置
14日前
太陽誘電株式会社
検出装置
17日前
新光電子株式会社
検知装置
20日前
CKD株式会社
錠剤検査装置
4日前
スガ試験機株式会社
ガス腐食試験機
17日前
日本碍子株式会社
ガスセンサ
10日前
株式会社東芝
センサ
今日
株式会社日立国際電気
試験装置
14日前
株式会社キーエンス
超音波流量センサ
今日
TDK株式会社
ガスセンサ
19日前
栗田工業株式会社
pH電極
19日前
株式会社タムラ製作所
電流検出器
20日前
ミツミ電機株式会社
測距装置
19日前
株式会社イシダ
電子秤
17日前
大陽日酸株式会社
液面センサ
10日前
愛知製鋼株式会社
位置推定システム
3日前
株式会社チノー
放射光導光型温度計
今日
中国電力株式会社
経路案内システム
18日前
株式会社ジークエスト
感温センサー
今日
株式会社チノー
走査放射温度計
21日前
東レ株式会社
センサー素子及びガスセンサー
3日前
株式会社トクヤマ
全固体型イオン選択性電極
10日前
中央精機株式会社
変角平行光投光装置
10日前
株式会社ヒロハマ
包装用容器の気密検査治具
6日前
TDK株式会社
センサモジュール
6日前
トヨタ自動車株式会社
電力供給システム
17日前
日本特殊陶業株式会社
ガスセンサ
24日前
TDK株式会社
磁気検出システム
6日前
ミネベアミツミ株式会社
測距装置
19日前
THKプレシジョン株式会社
荷重測定器
21日前
コムスキャンテクノ株式会社
X線CT装置
12日前
株式会社イシダ
計量装置
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ