TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024037312
公報種別
公開特許公報(A)
公開日
2024-03-19
出願番号
2022142060
出願日
2022-09-07
発明の名称
位置推定システム及び位置推定方法
出願人
東急建設株式会社
,
国立大学法人九州大学
代理人
弁護士法人クレオ国際法律特許事務所
主分類
G01S
5/14 20060101AFI20240312BHJP(測定;試験)
要約
【課題】電波の伝搬を遮る障害物が変化する環境においても位置推定結果の誤差が生じにくい位置推定システム及び位置推定方法を提供する。
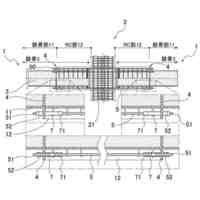
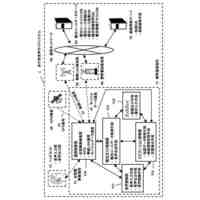
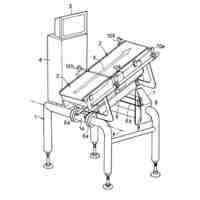
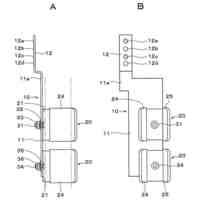
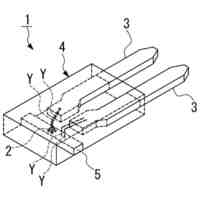
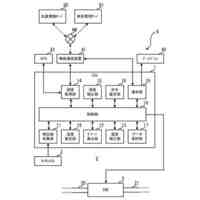
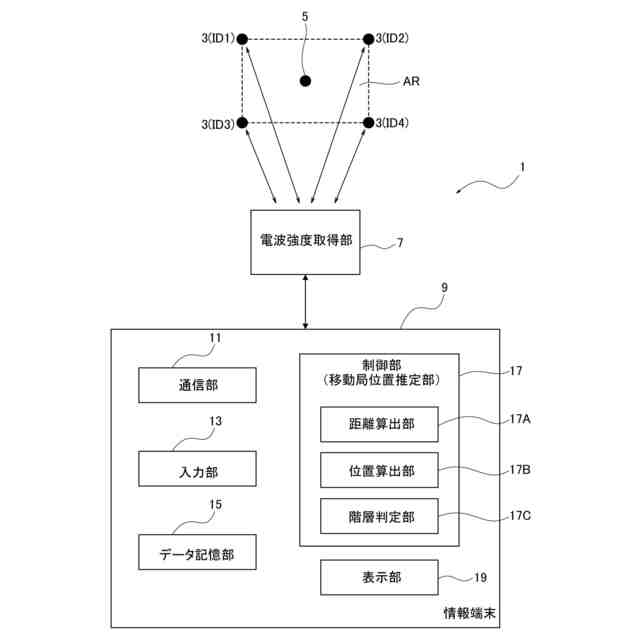
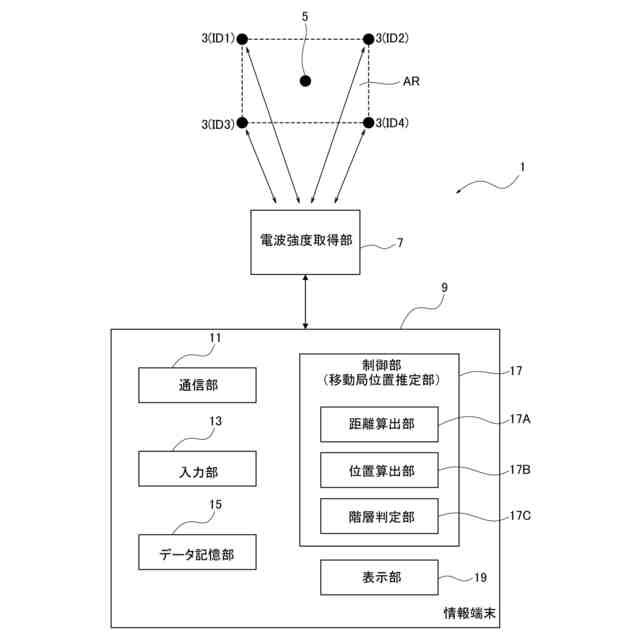
【解決手段】位置推定システム1は、計測対象エリアARの所定の位置座標に配置され、相互に電波を送受信可能な4個以上の固定局3と、固定局3に到達する電波を発信可能な移動局5と、固定局3から、基準電波強度、及び、移動局電波強度を取得する電波強度取得部7と、基準電波強度及び移動局電波強度に基づいて、移動局5のフロア内の位置座標を推定する移動局位置推定部(制御部)17とを備えている。移動局位置推定部17は、基準電波強度を基準にして補正した移動局電波強度に基づいて、4個以上の固定局のそれぞれと移動局5の間の固定局・移動局間距離を算出する距離算出部17Aと、4つ以上の固定局・移動局間距離に基づいて、移動局5の領域内の位置座標を算出する位置算出部17Bを有する。
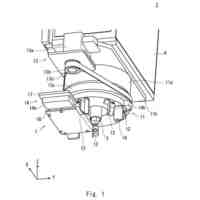
【選択図】図1
特許請求の範囲
【請求項1】
建物内のフロアの計測対象エリアの所定の位置座標に配置され、相互に電波を送受信可能な4個以上の固定局と、
前記4個以上の固定局に到達する電波を発信可能な移動局と、
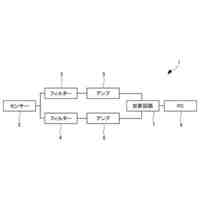
前記4個以上の固定局から、前記固定局のそれぞれが他の前記固定局から受信した電波の電波強度である基準電波強度、及び、前記固定局のそれぞれが前記移動局から受信した電波の電波強度である移動局電波強度を取得する電波強度取得部と、
前記電波強度取得部から取得した前記基準電波強度及び前記移動局電波強度に基づいて、前記移動局の前記フロア内の位置座標を推定する移動局位置推定部とを備え、
前記移動局位置推定部は、
前記基準電波強度を基準にして補正した前記移動局電波強度に基づいて、前記4個以上の固定局のそれぞれと前記移動局の間の固定局・移動局間距離を算出する距離算出部と、
4つ以上の前記固定局・移動局間距離に基づいて、前記移動局の領域内の位置座標を算出する位置算出部と、
を有することを特徴とする位置推定システム。
続きを表示(約 2,600 文字)
【請求項2】
前記距離算出部は、
前記4個以上の固定局のうちの1つを主固定局とし、他の固定局のうちの1つを従固定局とし、前記移動局が、前記主固定局と前記従固定局を結ぶ直線上に存在すると仮定して、前記主固定局が前記従固定局から受信した電波の電波強度に基づく前記基準電波強度と、前記主固定局が前記移動局から受信した電波の電波強度に基づく前記移動局電波強度の比から、前記主固定局と前記移動局の間の距離を算出し、
前記主固定局と残りの固定局との間でも、同様にして、前記主固定局と前記移動局の間の距離を算出し、
前記算出した前記主固定局と前記移動局の間の3つ以上の距離の平均値を、前記主固定局と前記移動局の間の固定局・移動局間距離とする
ことを特徴とする請求項1に記載の位置推定システム。
【請求項3】
前記距離算出部は、前記4個以上の固定局のそれぞれについて、前記固定局・移動局間距離を算出し、
前記位置算出部は、4つ以上の前記固定局・移動局間距離の中から最小の距離と、2番目及び3番目に小さい距離の3つの距離を選択し、
前記固定局・移動局間距離が最小である第1の固定局を中心にした該固定局・移動局間距離を半径とする第1の円を描き、前記固定局・移動局間距離が2番目に小さい第2の固定局を中心にした該固定局・移動局間距離を半径とする第2の円を描き、前記第1の円と前記第2の円の交点である2点の位置座標を求め、
前記2点の位置座標のうち、前記固定局・移動局間距離が3番目に小さい第3の固定局を中心にした該固定局・移動局間距離を半径とする第3の円に近い方の点の位置座標を前記移動局の位置座標として算出する
ことを特徴とする請求項2に記載の位置推定システム。
【請求項4】
前記位置算出部は、前記第1の円と前記第2の円の交点が無いまたは1点の場合には、
前記第1の固定局と前記第2の固定局を結ぶ線分を、最小の前記固定局・移動局間距離と2番目に小さい前記固定局・移動局間距離の比で内分する第1の内分点の位置座標を求め、
前記第1の固定局と前記第3の固定局を結ぶ線分を、最小の前記固定局・移動局間距離と3番目に小さい前記固定局・移動局間距離の比で内分する第2の内分点の位置座標を求め、
前記第1の内分点及び前記第2の内分点を結ぶ線分の中点の位置座標を前記移動局の位置座標として算出する
ことを特徴とする請求項3に記載の位置推定システム。
【請求項5】
前記フロアを中層フロアとして、
前記中層フロアの上の階の上層フロアの所定の位置座標に配置された4個以上の上層固定局と、
前記中層フロアの下の階の下層フロアの所定の位置座標に配置された4個以上の下層固定局と、をさらに備え、
前記電波強度取得部は、前記4個以上の上層固定局及び前記4個以上の下層固定局からも前記基準電波強度及び前記移動局電波強度を取得可能であり、
前記移動局位置推定部は、
前記上層固定局の前記移動局電波強度と前記下層固定局の前記移動局電波強度の差に基づいて、前記移動局が存在している階層を判定する階層判定部をさらに備えている
ことを特徴とする請求項3または4に記載の位置推定システム。
【請求項6】
前記階層判定部は、
前記4個以上の上層固定局の前記移動局電波強度の平均値、及び、前記4個以上の下層固定局の前記移動局電波強度の平均値を算出し、
前記4個以上の上層固定局の前記移動局電波強度の平均値と前記4個以上の下層固定局の前記移動局電波強度の平均値の差が、所定の数値範囲内であった場合には、前記移動局は前記中層フロアに存在していると判定し、
前記4個以上の上層固定局の前記移動局電波強度の平均値と前記4個以上の下層固定局の前記移動局電波強度の平均値の差が前記所定の数値範囲より大きい場合、前記4個以上の上層固定局の前記移動局電波強度の平均値の方が大きい場合には、前記移動局は前記上層フロアに存在していると判定し、前記4個以上の下層固定局の前記移動局電波強度の平均値の方が大きい場合には、前記移動局は前記下層フロアに存在していると判定する
ことを特徴とする請求項5に記載の位置推定システム。
【請求項7】
前記階層判定部は、
前記4個以上の上層固定局の前記移動局電波強度の最大値、及び、前記4個以上の下層固定局の前記移動局電波強度の最大値を選択し、
前記4個以上の上層固定局の前記移動局電波強度の最大値と前記4個以上の下層固定局の前記移動局電波強度の最大値の差が、所定の数値範囲内であった場合には、前記移動局は前記中層フロアに存在していると判定し、
前記4個以上の上層固定局の前記移動局電波強度の最大値と前記4個以上の下層固定局の前記移動局電波強度の最大値の差が前記所定の数値範囲より大きい場合、前記4個以上の上層固定局の前記移動局電波強度の最大値の方が大きい場合には、前記移動局は前記上層フロアに存在していると判定し、前記4個以上の下層固定局の前記移動局電波強度の最大値の方が大きい場合には、前記移動局は前記下層フロアに存在していると判定する
ことを特徴とする請求項5に記載の位置推定システム。
【請求項8】
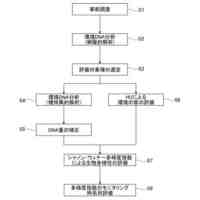
建物内のフロアの計測対象エリアの所定の位置座標に配置され、相互に電波を送受信可能な4個以上の固定局から前記固定局のそれぞれが他の前記固定局から受信した電波の電波強度である基準電波強度、及び、前記固定局のそれぞれが移動局から受信した電波の電波強度である移動局電波強度を取得する電波強度取得ステップと、
前記基準電波強度を基準にして補正した前記移動局電波強度に基づいて、前記4個以上の固定局のそれぞれと前記移動局の間の固定局・移動局間距離を算出する距離算出ステップと、
4つ以上の前記固定局・移動局間距離に基づいて、前記移動局の領域内の位置座標を算出する位置算出ステップと、
を含むことを特徴とする位置推定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置推定システム及び位置推定方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
領域内に複数の固定局を配置し、移動体に電波を発信する移動局を保持させ、領域内に存在する移動体の位置を推定する位置推定システムが知られている。
【0003】
例えば、特許文献1に記載の発明では、領域内に、所定の間隔をあけて複数の固定局を設置して、移動局を保持する対象物の位置を特定している。
【0004】
特許文献2に記載の発明では、電波の到達距離が長いサブギガヘルツ帯の電波を利用している。
【先行技術文献】
【特許文献】
【0005】
特開2019-2850号公報
特開2019-138785号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の発明が利用している固定局及び移動局は、電波の到達距離が短いものが想定されている。そのため、領域が広くなると、設置しなければならない固定局の数が多くなり、設置コストの増加が課題となる。
【0007】
特許文献2に記載の発明のように、サブギガヘルツ帯の電波を利用すれば、設置しなければならない固定局の数を少なくすることができる。しかしながら、利用する電波を単にサブギガヘルツ帯の電波に置き換えただけでは、様々な障害物の状態が日々変化する環境では、移動体の位置推定誤差が大きくなりやすいという課題がある。
【0008】
特に、建物の建設現場では、足場や資材の置き場の変化、大型車両の移動・停車、工程の進展による建物の変化等、電波の伝搬を遮る障害物の変化が大きい。また、大型車両等の大きな障害物等によって電波が遮られ、受信する電波の電波強度が極端に低くなり、位置の誤差が大きくなる、という課題もある。
【0009】
本発明の目的は、建物の建設現場のように、電波の伝搬を遮る障害物存在し、その位置や状態が時間的に変化する環境においても位置推定誤差を低減可能な位置推定システム及び位置推定方法を提供することである。
【課題を解決するための手段】
【0010】
前記目的を達成するために、本発明の位置推定システムは、建物内のフロアの計測対象エリアの所定の位置座標に配置され、相互に電波を送受信可能な4個以上の固定局と、前記4個以上の固定局に到達する電波を発信可能な移動局と、前記4個以上の固定局から、前記固定局のそれぞれが他の前記固定局から受信した電波の電波強度である基準電波強度、及び、前記固定局のそれぞれが前記移動局から受信した電波の電波強度である移動局電波強度を取得する電波強度取得部と、前記電波強度取得部から取得した前記基準電波強度及び前記移動局電波強度に基づいて、前記移動局の前記フロア内の位置座標を推定する移動局位置推定部とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
東急建設株式会社
複合構造体の構築方法
11日前
東急建設株式会社
生物多様性の評価方法
25日前
東急建設株式会社
位置推定システム及び位置推定方法
3か月前
東急建設株式会社
有圧換気扇及び電動シャッターの有圧換気扇の施工方法
1か月前
オンキヨー株式会社
システム
13日前
株式会社ヨコオ
検査治具
25日前
個人
歩行者音声ガイドシステム
24日前
横河電機株式会社
光学プローブ
13日前
株式会社豊田自動織機
無人走行体
28日前
昭電工業株式会社
測定装置
26日前
太陽誘電株式会社
検出装置
20日前
大和製衡株式会社
重量選別機
18日前
村田機械株式会社
変位検出装置
28日前
キーコム株式会社
試験システム
1か月前
キーコム株式会社
試験システム
1か月前
株式会社ニシヤマ
物品取付装置
21日前
トヨタ自動車株式会社
測定治具
28日前
株式会社東芝
センサ
5日前
矢崎総業株式会社
センサ
20日前
株式会社ニシヤマ
物品取付装置
21日前
TDK株式会社
磁気センサ
25日前
個人
氷河融雪水流出量の推定方法
12日前
大同特殊鋼株式会社
形状検出装置
20日前
三菱マテリアル株式会社
温度センサ
21日前
三晶エムイーシー株式会社
試料容器
6日前
トヨタ自動車株式会社
温度計測装置
今日
株式会社島津製作所
分析装置
20日前
株式会社不二越
X線測定装置
28日前
株式会社ミツトヨ
光学式エンコーダ
26日前
三菱マテリアル株式会社
温度センサ
今日
トヨタ自動車株式会社
劣化推定装置
21日前
オムロン株式会社
スイッチング装置
1か月前
三菱マテリアル株式会社
温度センサ
13日前
株式会社フジキン
濃度測定装置
25日前
東海電子株式会社
アルコール測定装置
13日前
株式会社ダイヘン
異常検出装置
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ