TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024013232
公報種別
公開特許公報(A)
公開日
2024-01-31
出願番号
2023117423
出願日
2023-07-19
発明の名称
測距装置及び測距方法
出願人
国立大学法人九州大学
,
国立研究開発法人産業技術総合研究所
,
国立大学法人大阪大学
代理人
個人
主分類
G01S
17/10 20200101AFI20240124BHJP(測定;試験)
要約
【課題】従来よりもノイズに頑健な測距装置等を提供する。
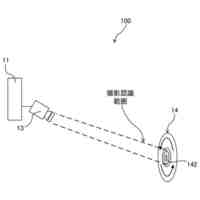
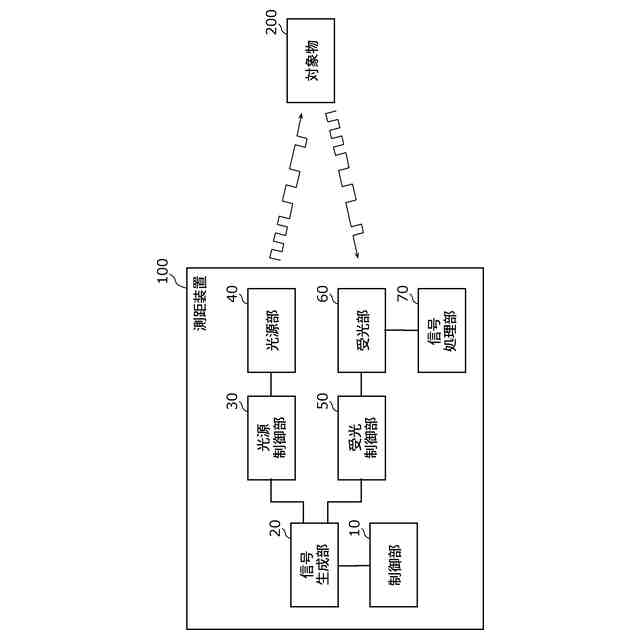
【解決手段】測距装置100は、TOF(Time Of Flight)方式により対象物までの距離を測定する測距装置であって、光源部40と、光源部40が出射した光が対象物200で反射された反射光を受光する受光素子と、受光素子が反射光を受光することにより発生した電荷が振り分けられる第1タップ、第2タップ及び第3タップとを有する受光部60と、光源部40の発光タイミング、並びに、第1タップ、第2タップ及び第3タップに対応する露光タイミングのための制御信号を、基本信号に擬似乱数を用いた変調を加えることで生成する信号生成部20とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
TOF(Time Of Flight)方式により対象物までの距離を測定する測距装置であって、
光源部と、
前記光源部が出射した光が前記対象物で反射された反射光を受光する受光素子と、前記受光素子が前記反射光を受光することにより発生した電荷が振り分けられる第1タップ、第2タップ及び第3タップとを有する受光部と、
前記光源部の発光タイミング、並びに、前記第1タップ、前記第2タップ及び前記第3タップに対応する露光タイミングのための制御信号を、基本信号に擬似乱数を用いた変調を加えることで生成する信号生成部とを備える
測距装置。
続きを表示(約 1,200 文字)
【請求項2】
前記擬似乱数を用いた変調は、ガロア体を用いた変調である
請求項1に記載の測距装置。
【請求項3】
前記ガロア体を用いた変調では、ガロア体として、前記受光部が有するタップの数と同数の位数のガロア体における擬似乱数が用いられる
請求項2に記載の測距装置。
【請求項4】
前記ガロア体を用いた変調では、ガロア体として、前記受光部が有するタップの数より大きい位数のガロア体における擬似乱数が用いられる
請求項2に記載の測距装置。
【請求項5】
前記第1タップ、前記第2タップ及び前記第3タップのそれぞれは、一期間をオンとする第1状態、一期間をオフとする第2状態、及び、一期間内においてオン及びオフの一方から他方へ切り替わる第3状態とを有し、
前記信号生成部は、前記擬似乱数に基づいて、前記第1タップ、前記第2タップ及び前記第3タップのうちの一のタップにおいて、前記第1状態、前記第2状態及び前記第3状態のうちの一の状態の出現確率を、他のタップと異ならせるように当該一のタップの制御信号を生成する
請求項4に記載の測距装置。
【請求項6】
前記信号生成部は、前記基本信号に第1擬似乱数を用いて変調を加えた第1信号と、前記基本信号に前記第1擬似乱数と異なる第2擬似乱数を用いて変調を加えた第2信号とを時間方向に多重化することで、前記発光タイミングのための前記制御信号を生成し、かつ、前記第1信号に基づく第1の受光信号と、前記第2信号に基づく第2の受光信号とを時間方向に多重化することで、前記露光タイミングのための制御信号を生成する
請求項1~5のいずれか1項に記載の測距装置。
【請求項7】
前記測距装置が配置される空間には、他の測距装置が配置されており、
前記受光部が受光した外乱光に基づいて、当該外乱光を出射するために用いられた擬似乱数を特定し、特定された擬似乱数から前記他の測距装置を識別する信号処理部を備える
請求項1~5のいずれか1項に記載の測距装置。
【請求項8】
前記第1タップ、前記第2タップ、及び、前記第3タップのそれぞれに蓄積された電荷量を用いた比に基づいて、前記距離を算出する算出部を備える
請求項1~5のいずれか1項に記載の測距装置。
【請求項9】
前記基本信号は、単一周波数の信号である
請求項1~5のいずれか1項に記載の測距装置。
【請求項10】
前記発光タイミングのための制御信号の基本信号は、パルス状の信号であり、
前記露光タイミングのための制御信号の基本信号は、前記第1タップ、前記第2タップ及び前記第3タップで位相が異なる台形形状の信号である
請求項1~5のいずれか1項に記載の測距装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、測距装置及び測距方法に関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
従来、対象物までの距離を測定する測距装置として、光の飛行時間を利用したTOF(Time Of Flight)方式の測距装置が知られている。特許文献1には、スペクトラム拡散信号が光パルスの変調基準周波数に印加される測距装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特表2014-522979号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、測距装置では、測定される距離がより外乱ノイズの影響を受けないことが望まれる。つまり、よりノイズに頑健な測距装置が望まれる。
【0005】
そこで、本発明は、従来よりもノイズに頑健な測距装置及び測距方法を提供する。
【課題を解決するための手段】
【0006】
本発明の一形態に係る測距装置は、TOF(Time Of Flight)方式により対象物までの距離を測定する測距装置であって、光源部と、前記光源部が出射した光が前記対象物で反射された反射光を受光する受光素子、及び、前記受光素子が前記反射光を受光することにより発生した電荷が振り分けられる第1タップ、第2タップ及び第3タップを有する受光部と、前記光源部の発光タイミング、並びに、前記第1タップ、前記第2タップ及び前記第3タップに対応する露光タイミングのための制御信号を、基本信号に擬似乱数を用いた変調を加えることで生成する信号生成部とを備える。
【0007】
本発明の一形態に係る測距方法は、TOF(Time Of Flight)方式により対象物までの距離を測定する測距装置で実行される測距方法であって、前記測距装置は、光源部と、前記光源部が出射した光が前記対象物で反射された反射光を受光する受光素子、及び、前記受光素子が前記反射光を受光することにより発生した電荷が振り分けられる第1タップ、第2タップ及び第3タップを有する受光部とを備え、前記測距方法は、前記光源部の発光タイミング、前記受光素子の露光タイミング、並びに、前記第1タップ、前記第2タップ及び前記第3タップへの電荷の振り分けのそれぞれを制御するための制御信号を、基本信号に擬似乱数を用いた変調を加えることで生成する。
【発明の効果】
【0008】
本発明の一形態によれば、従来よりもノイズに頑健な測距装置等を実現することができる。
【図面の簡単な説明】
【0009】
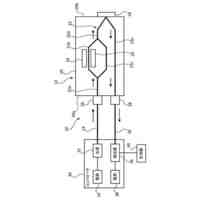
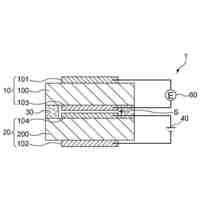
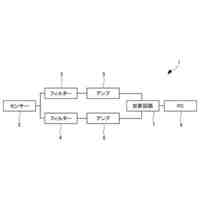
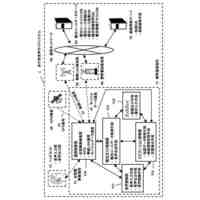
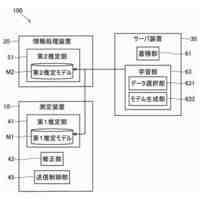
図1は、実施の形態1に係る測距装置の機能構成を示すブロック図である。
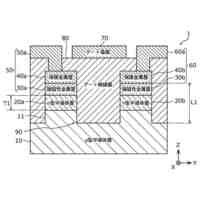
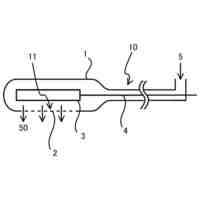
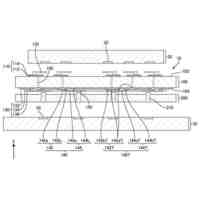
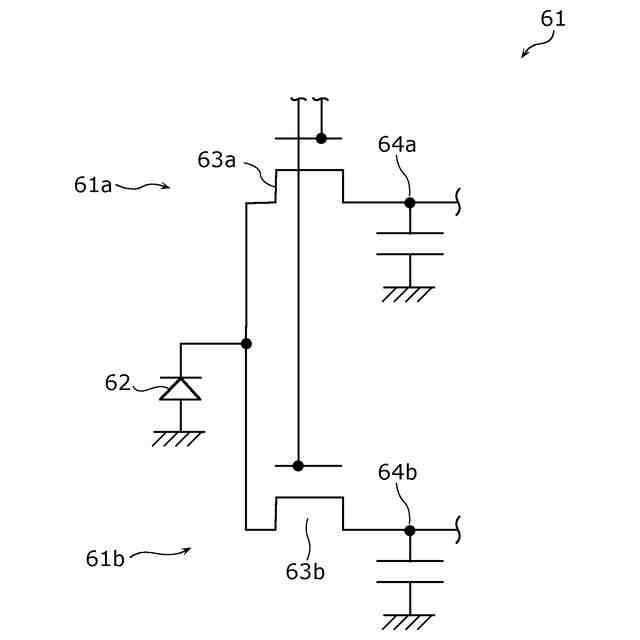
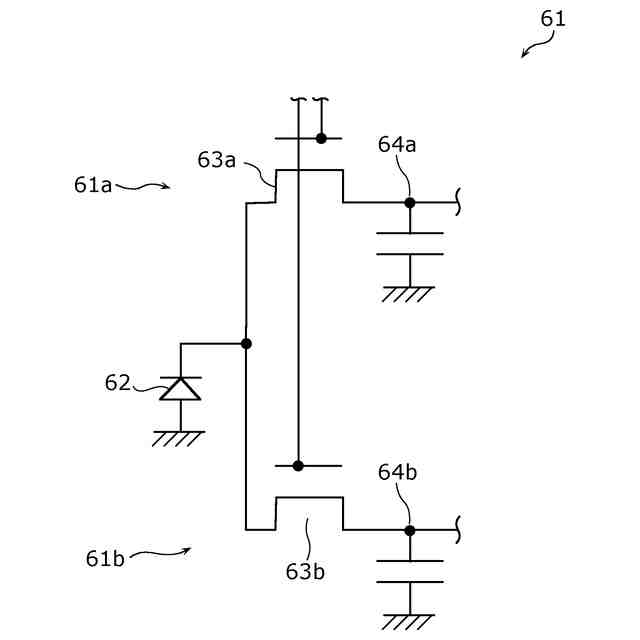
図2は、実施の形態1に係る受光部の画素の回路構成の一部を示す図である。
図3は、各種信号の一例を示す図である。
図4は、実施の形態1に係る発光制御信号及び露光制御信号の一例を示す図である。
図5は、実施の形態1に係る検出信号及び距離の算出方法の一例を示す図である。
図6は、実施の形態1に係る測距装置の動作を示すフローチャートである。
図7Aは、距離の測定結果の比較を示す第1図である。
図7Bは、距離の測定結果の比較を示す第2図である。
図8は、比較例の測距装置の測定結果を示す図である。
図9は、実施の形態1に係る測距装置の測定結果を示す図である。
図10は、実施の形態1の変形例に係る発光制御信号及び露光制御信号の一例を示す図である。
図11は、実施の形態1の変形例に係る測距装置の動作を示すフローチャートである。
図12は、実施の形態1の変形例に係る測距装置の測定結果を示す図である。
図13は、実施の形態2に係る受光部の画素の回路構成の一部を示す図である。
図14は、実施の形態2に係る発光制御信号及び露光制御信号の一例を示す図である。
図15は、実施の形態2に係る検出信号及び距離の算出方法の一例を示す図である。
図16は、実施の形態2に係る測距装置の動作を示すフローチャートである。
図17Aは、比較例の測距装置の測定結果を示す図である。
図17Bは、実施の形態2に係る測距装置の測定結果を示す第1図である。
図18は、実施の形態2に係る測距装置の測定結果を示す第2図である。
図19は、動作例1に係る発光制御信号及び露光制御信号の一例を示す図である。
図20Aは、図19のタイミングチャートを用いてシミュレーションして得られたグラフを示す図である。
図20Bは、図19のタイミングチャートを用いて実際に測定して得られたグラフを示す図である。
図21は、動作例2に係る発光制御信号及び露光制御信号の一例を示す図である。
図22Aは、図21のタイミングチャートを用いてシミュレーションして得られたグラフを示す図である。
図22Bは、図21のタイミングチャートを用いて実際に測定して得られたグラフを示す図である。
図23は、動作例3に係る発光制御信号及び露光制御信号の一例を示す図である。
図24は、図23のタイミングチャートを用いて得られたグラフを示す図である。
図25は、追加で行った第1距離計測の様子を示す図である。
図26Aは、従来手法における距離計測結果を示す図である。
図26Bは、擬似乱数変調を用いた手法における距離計測結果を示す図である。
図27Aは、図3の(b)に示す基本信号に擬似乱数変調を加えた制御信号を用いた場合の距離計測結果を示す図である。
図27Bは、図3の(f)に示す基本信号に擬似乱数変調を加えた制御信号を用いた場合の距離計測結果を示す図である。
図28は、基本信号の違いによる距離計測の比較結果を示す図である。
図29Aは、図3の(b)に示す基本信号を用いた場合のコーディング曲線を説明するための図である。
図29Bは、図3の(f)に示す基本信号を用いた場合のコーディング曲線を説明するための図である。
図30は、追加で行った第2距離計測の様子を示す図である。
図31Aは、従来手法における距離計測結果を示す図である。
図31Bは、擬似乱数変調を用いた手法における距離計測結果を示す図である。
図32Aは、ノイズがない環境において、図3の(d)に示す基本信号を用いた場合の距離推定精度の評価結果を示す図である。
図32Bは、ノイズがない環境において、図3の(b)に示す基本信号を用いた場合の距離推定精度の評価結果を示す図である。
図32Cは、ノイズがない環境において、図3の(f)に示す基本信号を用いた場合の距離推定精度の評価結果を示す図である。
図32Dは、ノイズがない環境において、基本信号に対してDSSS変調を加えた場合の距離推定精度の評価結果を示す図である。
図32Eは、ノイズがない環境において、図3の(d)に示す基本信号に対して擬似乱数変調を加えた場合の距離推定精度の評価結果を示す図である。
図32Fは、ノイズがない環境において、図3の(b)に示す基本信号に対して擬似乱数変調を加えた場合の距離推定精度の評価結果を示す図である。
図32Gは、ノイズがない環境において、図3の(f)に示す基本信号に対して擬似乱数変調を加えた場合の距離推定精度の評価結果を示す図である。
図33Aは、ノイズがある環境において、図3の(d)に示す基本信号を用いた場合の距離推定精度の評価結果を示す図である。
図33Bは、ノイズがある環境において、図3の(b)に示す基本信号を用いた場合の距離推定精度の評価結果を示す図である。
図33Cは、ノイズがある環境において、図3の(f)に示す基本信号を用いた場合の距離推定精度の評価結果を示す図である。
図33Dは、ノイズがある環境において、基本信号に対してDSSS変調を加えた場合の距離推定精度の評価結果を示す図である。
図33Eは、ノイズがある環境において、図3の(d)に示す基本信号に対して擬似乱数変調を加えた場合の距離推定精度の評価結果を示す図である。
図33Fは、ノイズがある環境において、図3の(b)に示す基本信号に対して擬似乱数変調を加えた場合の距離推定精度の評価結果を示す図である。
図33Gは、ノイズがある環境において、図3の(f)に示す基本信号に対して擬似乱数変調を加えた場合の距離推定精度の評価結果を示す図である。
図34は、距離推定精度の比較結果を示す図である。
【発明を実施するための形態】
【0010】
本発明の一態様に係る測距装置は、TOF(Time Of Flight)方式により対象物までの距離を測定する測距装置であって、光源部と、前記光源部が出射した光が前記対象物で反射された反射光を受光する受光素子と、前記受光素子が前記反射光を受光することにより発生した電荷が振り分けられる第1タップ、第2タップ及び第3タップとを有する受光部と、前記光源部の発光タイミング、並びに、前記第1タップ、前記第2タップ及び前記第3タップに対応する露光タイミングのための制御信号を、基本信号に擬似乱数を用いた変調を加えることで生成する信号生成部とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人九州大学
梁貫通孔補強構造
13日前
国立大学法人九州大学
スピンMOSFET
15日前
株式会社リコー
化合物
6日前
国立大学法人九州大学
ゲル、及びゲルの製造方法
1か月前
トヨタ自動車株式会社
光電界センサ装置
6日前
株式会社ブリヂストン
積層体及びタイヤ
14日前
国立大学法人九州大学
水電解セル用アノード構造及び水電解セル
1か月前
東亞合成株式会社
細胞分離材及び診断機器
26日前
国立大学法人九州大学
ジカルボン酸誘導体構造を有する化合物の製造方法
1か月前
国立大学法人九州大学
ジカルボン酸誘導体構造を有する化合物の製造方法
1か月前
三菱瓦斯化学株式会社
金属錯体および過酸化水素の製造方法
1か月前
ジャパン・リニューアブル・エナジー株式会社
風況予測システム、および風況予測方法
1か月前
独立行政法人国立高等専門学校機構
プラズマ発生装置及びそれを用いた治療装置並びに植物処理装置
1か月前
三井金属鉱業株式会社
酸素センサ及びそれを具備する微小機械電気素子
1か月前
日本電信電話株式会社
編集ラベル表現ベクトル生成装置、学習装置、編集ラベル表現ベクトル生成方法、学習方法及びプログラム
1か月前
国立大学法人九州大学
微生物油産生ラビリンチュラ類、微生物油、ならびにそれらの作成方法およびそれらの使用
5日前
株式会社オートネットワーク技術研究所
熱伝導性フィラー、熱伝導性複合材料、ワイヤーハーネス、および熱伝導性フィラーの製造方法
5日前
オンキヨー株式会社
システム
15日前
個人
歩行者音声ガイドシステム
26日前
横河電機株式会社
光学プローブ
15日前
個人
回転動作検出システム
1日前
太陽誘電株式会社
検出装置
22日前
大和製衡株式会社
重量選別機
20日前
アズビル株式会社
流量センサ
今日
矢崎総業株式会社
センサ
22日前
株式会社ニシヤマ
物品取付装置
23日前
株式会社ニシヤマ
物品取付装置
23日前
株式会社東芝
センサ
7日前
株式会社ヨコオ
接続装置
今日
個人
氷河融雪水流出量の推定方法
14日前
株式会社テイエルブイ
流量推定システム
1日前
大同特殊鋼株式会社
形状検出装置
22日前
トヨタ自動車株式会社
温度計測装置
2日前
三菱マテリアル株式会社
温度センサ
15日前
三晶エムイーシー株式会社
試料容器
8日前
株式会社島津製作所
分析装置
22日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ