TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025174475
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024080875
出願日
2024-05-17
発明の名称
経路設定方法、移動体、管理システム、及びプログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G05D
1/622 20240101AFI20251120BHJP(制御;調整)
要約
【課題】演算負荷を低減しつつ、障害物を適切に回避する経路を設定する。
【解決手段】経路設定方法は、移動体の目的位置の情報を取得するステップと、障害物の位置の情報を点群として取得するステップと、移動体の経路計算を実行するステップと、を含み、経路計算を実行するステップにおいては、移動体の第1方向における位置に基づいて、移動体が移動可能な走行可能領域を設定し、走行可能領域に基づいて、走行可能領域内に位置する点群のうちから、解析点群を抽出し、解析点群を第1方向と直交する第2方向に向けて移動体に投影した投影点の、第2方向における座標が、解析点群の第2方向における座標よりも、走行可能領域の第2方向の中央側の値となり、かつ、目的位置に向かう経路を、移動体の経路として設定する。
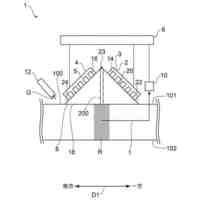
【選択図】図11
特許請求の範囲
【請求項1】
移動体の目的位置の情報を取得するステップと、
障害物の位置の情報を点群として取得するステップと、
移動体の経路計算を実行するステップと、を含み、
前記経路計算を実行するステップにおいては、
前記移動体の第1方向における位置に基づいて、前記移動体が移動可能な走行可能領域を設定し、
前記走行可能領域に基づいて、前記走行可能領域の内部に位置する前記点群のうちから、解析点群を抽出し、
前記解析点群を前記第1方向と直交する第2方向に向けて前記移動体に投影した投影点の、前記第2方向における座標が、前記解析点群の前記第2方向における座標よりも、前記走行可能領域の前記第2方向の中央側の値となり、かつ、前記目的位置に向かう経路を、前記移動体の経路として設定する、
経路設定方法。
続きを表示(約 1,800 文字)
【請求項2】
前記経路計算を実行するステップは、
前記移動体が占める車体領域と、前記移動体の進行方向側の前方領域と、前記移動体の進行方向と反対側の後方領域と、を含む占有領域を設定し、
前記解析点群を前記占有領域の周縁に投影した点を、前記投影点とする、
請求項1に記載の経路設定方法。
【請求項3】
前記経路計算を実行するステップは、
先読みステップ毎の前記移動体の前記第1方向における位置に基づき、前記先読みステップ毎に前記走行可能領域を設定し、
前記先読みステップ毎の前記走行可能領域に基づいて、前記先読みステップ毎に前記解析点群を抽出し、
前記先読みステップ毎の前記投影点の前記第2方向における座標が、前記解析点群の前記第2方向における座標よりも、前記第2方向において前記走行可能領域の中央側の値となることを、制約条件を設定し、
前記先読みステップ毎の前記移動体の位置と前記目的位置との差が小さくなるほど評価が高くなる評価関数と、前記制約条件とに基づき最適化計算を行い、前記移動体の経路を計算する、
請求項1又は請求項2に記載の経路設定方法。
【請求項4】
前記移動体の基準経路を取得するステップをさらに含み、
前記経路計算を実行するステップにおいては、前記基準経路の座標及び向きに基づいて、取得した点群を、前記基準経路を基準とした座標に座標変換して、前記座標変換した前記点群を用いて、前記走行可能領域を設定し、前記解析点群を抽出する、
請求項1又は請求項2に記載の経路設定方法。
【請求項5】
前記経路計算を実行するステップでは、
前記経路の始点位置について、前記第1方向の座標、前記第2方向の座標、及び向きのうちで、前記第1方向の座標のみを固定して、前記経路の設定を行う、
請求項1又は請求項2に記載の経路設定方法。
【請求項6】
前記経路計算を実行するステップでは、
前記移動体の現在位置から前記始点位置までの経路も更に設定する、
請求項5に記載の経路設定方法。
【請求項7】
請求項1又は請求項2に記載の経路設定方法で設定された前記経路に従って前記移動体を移動させる、
移動体。
【請求項8】
投影点の第1方向と直交する第2方向における座標が、解析点群の前記第2方向における座標よりも、走行可能領域の前記第2方向の中央側の値となり、かつ、目的位置に向かう経路を取得する経路取得部と、
前記経路に従って移動体を移動させる移動制御部と、
を含み、
前記走行可能領域は、前記移動体の第1方向における位置に基づいて設定された、前記移動体が移動可能な領域であり、
前記解析点群は、前記走行可能領域に基づいて、前記走行可能領域の内部に位置する、障害物の位置を示す点群のうちから、抽出されるものであり、
前記投影点は、前記解析点群を前記第2方向に向けて前記移動体に投影した点である、
移動体。
【請求項9】
請求項1又は請求項2に記載の経路設定方法により設定した前記経路を前記移動体に送信する、管理システム。
【請求項10】
移動体の目的位置の情報を取得するステップと、
障害物の位置の情報を点群として取得するステップと、
移動体の経路計算を実行するステップと、
を、コンピュータに実行させるプログラムであって、
前記経路計算を実行するステップにおいては、
前記移動体の第1方向における位置に基づいて、前記移動体が移動可能な走行可能領域を設定し、
前記走行可能領域に基づいて、前記走行可能領域の内部に位置する前記点群のうちから、解析点群を抽出し、
前記解析点群を前記第1方向に直交する第2方向において前記移動体に投影した投影点の、前記第2方向における座標が、前記解析点群の前記第2方向における座標よりも、前記走行可能領域の前記第2方向の中央側の値となり、かつ、前記目的位置に向かう経路を、前記移動体の経路として設定する、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、経路設定方法、移動体、管理システム、及びプログラムに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
移動体を目的位置まで自律的に移動させるために、様々な計算を行うことによって移動体の移動経路が設定され、それに基づいて移動体が自律的に動作することにより、移動体が自律的に移動する。このような移動体は、経路の近傍に存在する障害物を回避しつつ、目的位置まで到達することが求められる。
【0003】
例えば、下記の特許文献1には、自律移動体の占有領域を単一の楕円で近似し、その楕円内にすべての障害物が内包されないことを制約とし、一定時刻先までの将来に渡って制約を守るように最適化問題を解くことで、障害物回避経路を生成している。
【先行技術文献】
【特許文献】
【0004】
特開2022-134905号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、演算負荷を低減しつつ、障害物を適切に回避する経路を設定することが求められている。
【0006】
本開示は上記課題を鑑み、演算負荷を低減しつつ、障害物を適切に回避する経路を設定することができる経路設定方法、移動体、管理システム及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本開示に係る移動体の経路設定方法は、移動体の目的位置の情報を取得するステップと、障害物の位置の情報を点群として取得するステップと、移動体の経路計算を実行するステップと、を含み、前記経路計算を実行するステップにおいては、前記移動体の第1方向における位置に基づいて、前記移動体が移動可能な走行可能領域を設定し、前記走行可能領域に基づいて、前記走行可能領域の内部に位置する前記点群のうちから、解析点群を抽出し、前記解析点群を前記第1方向と直交する第2方向に向けて前記移動体に投影した投影点の、前記第2方向における座標が、前記解析点群の前記第2方向における座標よりも、前記走行可能領域の前記第2方向の中央側の値となり、かつ、前記目的位置に向かう経路を、前記移動体の経路として設定する。
【0008】
本開示に係る移動体は、前記経路設定方法で設定された前記経路に従って前記移動体を移動させる。
【0009】
本開示に係る移動体は、投影点の第1方向と直交する第2方向における座標が、解析点群の前記第2方向における座標よりも、走行可能領域の前記第2方向の中央側の値となり、かつ、目的位置に向かう経路を取得する経路取得部と、前記経路に従って移動体を移動させる移動制御部と、を含み、前記走行可能領域は、前記移動体の第1方向における位置に基づいて設定された、前記移動体が移動可能な領域であり、前記解析点群は、前記走行可能領域に基づいて、前記走行可能領域の内部に位置する、障害物の位置を示す点群のうちから、抽出されるものであり、前記投影点は、前記解析点群を前記第2方向に向けて前記移動体に投影した点である。
【0010】
本開示に係る管理システムは、前記経路設定方法により設定した前記経路を前記移動体に送信する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱重工業株式会社
原子炉
16日前
三菱重工業株式会社
ボイラ壁
1か月前
三菱重工業株式会社
施工方法
22日前
三菱重工業株式会社
遠心圧縮機
今日
三菱重工業株式会社
原子力システム
1日前
三菱重工業株式会社
石膏脱水システム
22日前
三菱重工業株式会社
燃焼筒の取付方法
1か月前
三菱重工業株式会社
ガスタービン起動方法
1か月前
三菱重工業株式会社
蒸気タービンシステム
1か月前
三菱重工業株式会社
ガス処理装置および方法
29日前
三菱重工業株式会社
アンモニア除害システム
22日前
三菱重工業株式会社
シール装置及び回転機械
21日前
三菱重工業株式会社
原子炉炉心および原子炉
16日前
三菱重工業株式会社
燃焼設備および制御方法
1か月前
三菱重工業株式会社
評価装置および評価方法
1日前
三菱重工業株式会社
軸流圧縮機、及びその動翼
23日前
三菱重工業株式会社
計測システムおよび計測方法
29日前
三菱重工業株式会社
レドックスフロー電池システム
1か月前
三菱重工業株式会社
水素吸蔵材料および原子力設備
1か月前
三菱重工業株式会社
支持部材及び接着剤の監視方法
22日前
三菱重工業株式会社
インバータ装置及びその保護方法
29日前
三菱重工業株式会社
水位制御方法および水位制御装置
1日前
三菱重工業株式会社
インバータ基板及びインバータ装置
29日前
三菱重工業株式会社
演算方法、プログラム及び演算装置
1か月前
三菱重工業株式会社
電動ファンおよび電動垂直離着陸機
1か月前
三菱重工業株式会社
排ガス処理触媒及び排ガス処理方法
今日
三菱重工業株式会社
圧縮機の静翼セグメント、及び圧縮機
22日前
三菱重工業株式会社
燃料製造システム、及び燃料製造方法
24日前
三菱重工業株式会社
RPB装置及び酸性ガス回収システム
29日前
三菱重工業株式会社
制御装置、制御方法、及びプログラム
今日
三菱重工業株式会社
油圧防振装置および構造物の支持構造
2日前
三菱重工業株式会社
補修方法、プログラム、及び補修装置
23日前
三菱重工業株式会社
合流支援システム、および合流支援方法
24日前
三菱重工業株式会社
検査システム、検査方法及びプログラム
8日前
三菱重工業株式会社
超音波探傷装置、および超音波探傷方法
21日前
三菱重工業株式会社
ダスト除去システムおよびダスト除去方法
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ