TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025173745
公報種別
公開特許公報(A)
公開日
2025-11-28
出願番号
2024079467
出願日
2024-05-15
発明の名称
制御装置、制御方法、及びプログラム
出願人
三菱重工業株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B65G
60/00 20060101AFI20251120BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】複数の対象物を同時に掴持して適切に積み付ける。
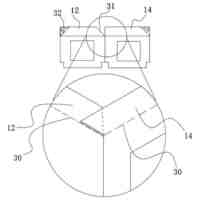
【解決手段】制御装置は、積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、第1パレットにおける積み付け位置を示す配置情報を取得する位置取得部と、配置情報に基づいて、予定対象物のうちから、隣り合う複数個の予定対象物を、同時に複数個を積み付ける予定対象群として選択する第1選択部と、積み付け元となる第2パレットを、対象物が搭載された状態で上方から検出した検出結果を取得する画像取得部と、検出結果に基づいて、第2パレットに搭載されている対象物のうちから、隣り合う複数個の対象物を、予定対象群として積み付ける対象群として選択する第2選択部と、を含む。
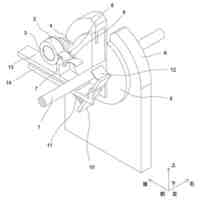
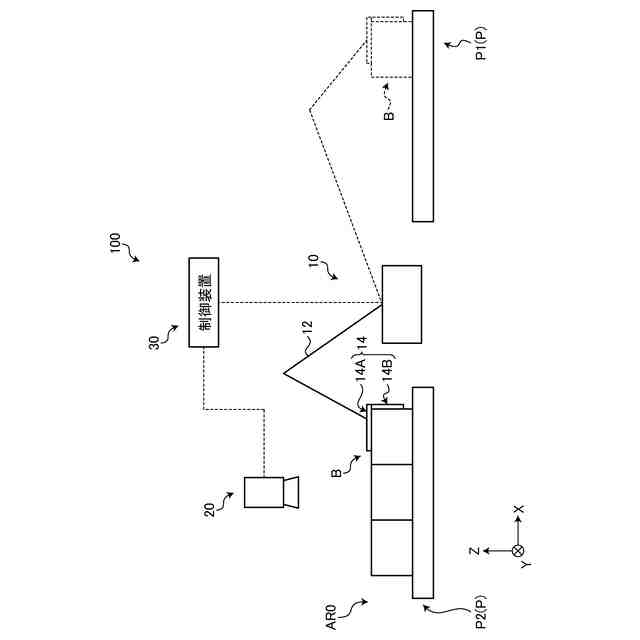
【選択図】図1
特許請求の範囲
【請求項1】
積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、前記第1パレットにおける積み付け位置を示す配置情報を取得する位置取得部と、
前記配置情報に基づいて、前記予定対象物のうちから、隣り合う複数個の前記予定対象物を、同時に複数個を積み付ける予定対象群として選択する第1選択部と、
積み付け元となる第2パレットを、前記対象物が搭載された状態で上方から検出した検出結果を取得する画像取得部と、
前記検出結果に基づいて、前記第2パレットに搭載されている前記対象物のうちから、隣り合う複数個の前記対象物を、前記予定対象群として積み付ける対象群として選択する第2選択部と、
を含む、
制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記対象物は、上面視において矩形状であり、
第1選択部は、前記予定対象物のうちから、上面視において長辺同士が隣り合っており、かつ、互いの距離が所定距離以下となる複数個の前記予定対象物を、前記予定対象群として選択する、
請求項1に記載の制御装置。
【請求項3】
前記第2選択部は、前記予定対象群の上面視における大きさに基づいて、上面視における許容領域を設定し、前記第2パレット上で隣り合う複数個の前記対象物のうちから、上面視において前記許容領域の範囲内にある複数個の対象物を、前記対象群として選択する、
請求項1又は請求項2に記載の制御装置。
【請求項4】
前記第2選択部は、前記第2パレット上で隣り合う複数個の前記対象物のうちから、その対象物と前記第1パレットとの間に他の対象物が存在しない複数個の対象物を、前記対象群として選択する、
請求項1又は請求項2に記載の制御装置。
【請求項5】
前記第1選択部は、前記予定対象群の情報に基づいて、それぞれの前記予定対象物の前記第1パレットへの積み付け順を示す第1積付情報を設定する、
請求項1又は請求項2に記載の制御装置。
【請求項6】
前記第2選択部は、前記積み付け順が早い前記予定対象群から順に、その予定対象群に対応する前記対象群を選択する、
請求項5に記載の制御装置。
【請求項7】
前記第1選択部は、前記第1パレットにおける前記予定対象物の配置パターンが所定のパターンである場合には、前記予定対象群を設定しない、
請求項1又は請求項2に記載の制御装置。
【請求項8】
前記第2選択部は、前記予定対象群に割り当てる前記対象群が存在しない場合には、複数の前記対象物を個別に前記予定対象群に割り当てる、
請求項1又は請求項2に記載の制御装置。
【請求項9】
積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、前記第1パレットにおける積み付け位置を示す配置情報を取得するステップと、
前記配置情報に基づいて、前記予定対象物のうちから、隣り合う複数個の前記予定対象物を、同時に複数個を積み付ける予定対象群として選択するステップと、
積み付け元となる第2パレットを、前記対象物が搭載された状態で上方から検出した検出結果を取得するステップと、
前記検出結果に基づいて、前記第2パレットに搭載されている前記対象物のうちから、隣り合う複数個の前記対象物を、前記予定対象群として積み付ける対象群として選択するステップと、
を含む、
制御方法。
【請求項10】
積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、前記第1パレットにおける積み付け位置を示す配置情報を取得するステップと、
前記配置情報に基づいて、前記予定対象物のうちから、隣り合う複数個の前記予定対象物を、同時に複数個を積み付ける予定対象群として選択するステップと、
積み付け元となる第2パレットを、前記対象物が搭載された状態で上方から検出した検出結果を取得するステップと、
前記検出結果に基づいて、前記第2パレットに搭載されている前記対象物のうちから、隣り合う複数個の前記対象物を、前記予定対象群として積み付ける対象群として選択するステップと、
をコンピュータに実行させる、
プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置、制御方法、及びプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
所定の物品を選別して出庫する場合、特定のパレットに載置された対象物をパレタイザが掴み取り、出庫用のパレットに積み付けを行う。例えば特許文献1には、複数の対象オブジェクトを同時に掴持して転置する輸送ロボットが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-9120号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、複数の対象物を同時に掴持して適切に積み付けるには、改善の余地がある。
【0005】
本開示は、複数の対象物を同時に掴持して適切に積み付けることが可能な制御装置、制御方法、及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る制御装置は、積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、前記第1パレットにおける積み付け位置を示す配置情報を取得する位置取得部と、前記配置情報に基づいて、前記予定対象物のうちから、隣り合う複数個の前記予定対象物を、同時に複数個を積み付ける予定対象群として選択する第1選択部と、積み付け元となる第2パレットを、前記対象物が搭載された状態で上方から検出した検出結果を取得する画像取得部と、前記検出結果に基づいて、前記第2パレットに搭載されている前記対象物のうちから、隣り合う複数個の前記対象物を、前記予定対象群として積み付ける対象群として選択する第2選択部と、を含む。
【0007】
本開示に係る制御方法は、積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、前記第1パレットにおける積み付け位置を示す配置情報を取得するステップと、前記配置情報に基づいて、前記予定対象物のうちから、隣り合う複数個の前記予定対象物を、同時に複数個を積み付ける予定対象群として選択するステップと、積み付け元となる第2パレットを、前記対象物が搭載された状態で上方から検出した検出結果を取得するステップと、前記検出結果に基づいて、前記第2パレットに搭載されている前記対象物のうちから、隣り合う複数個の前記対象物を、前記予定対象群として積み付ける対象群として選択するステップと、を含む。
【0008】
本開示に係るプログラムは、積み付け先の第1パレットで積み付けが予定されている対象物である予定対象物についての、前記第1パレットにおける積み付け位置を示す配置情報を取得するステップと、前記配置情報に基づいて、前記予定対象物のうちから、隣り合う複数個の前記予定対象物を、同時に複数個を積み付ける予定対象群として選択するステップと、積み付け元となる第2パレットを、前記対象物が搭載された状態で上方から検出した検出結果を取得するステップと、前記検出結果に基づいて、前記第2パレットに搭載されている前記対象物のうちから、隣り合う複数個の前記対象物を、前記予定対象群として積み付ける対象群として選択するステップと、をコンピュータに実行させる。
【発明の効果】
【0009】
本開示によれば、複数の対象物を同時に掴持して適切に積み付けることができる。
【図面の簡単な説明】
【0010】
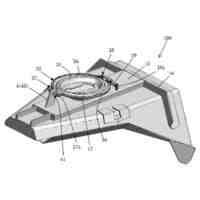
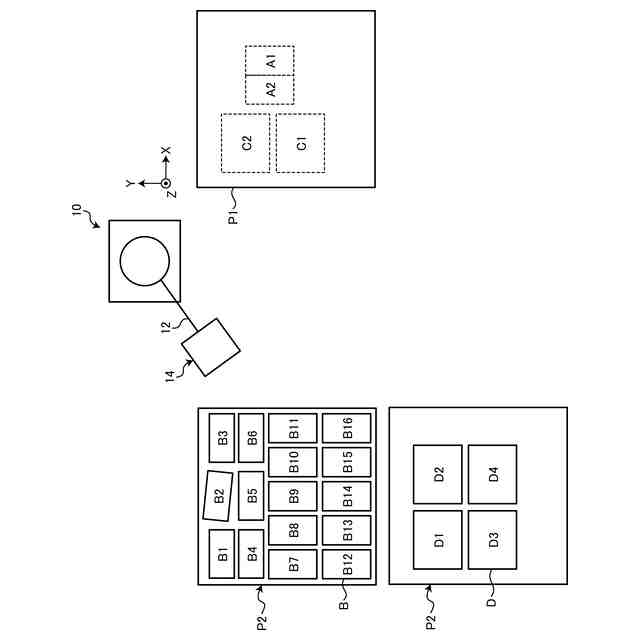
図1は、本実施形態に係る積付システムの模式図である。
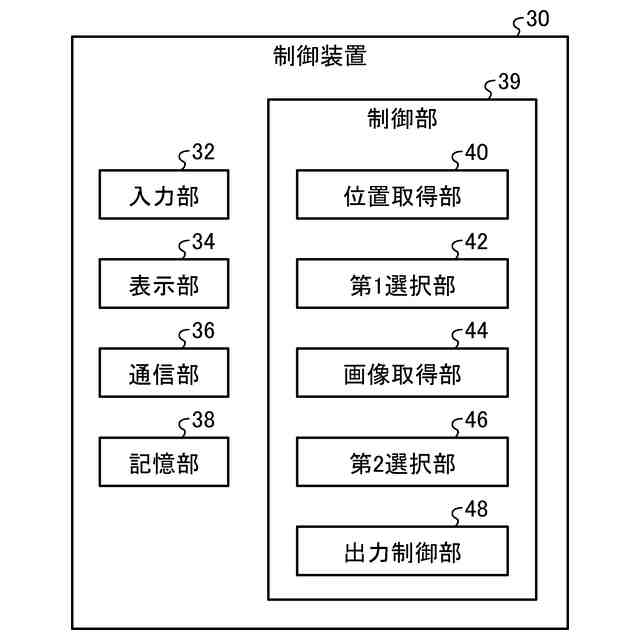
図2は、制御装置の模式的なブロック図である。
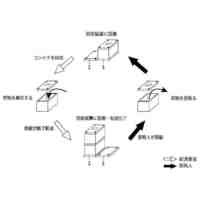
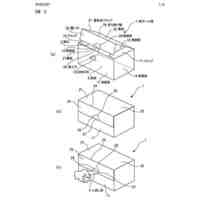
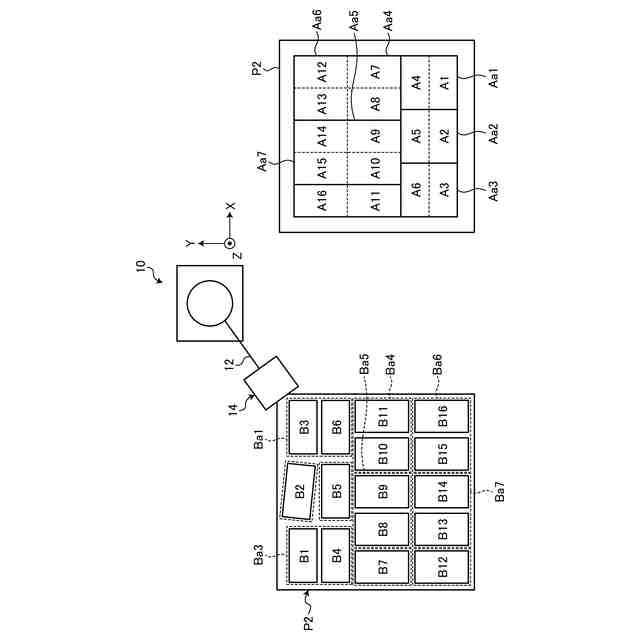
図3は、積付計画の設定の一例を示す模式図である。
図4は、予定対象群の選択の一例を説明するための模式図である。
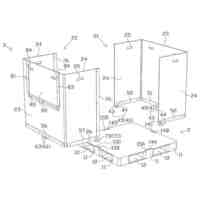
図5は、対象群の選択方法の一例を示す模式図である。
図6は、対象群の選択方法の一例を示す模式図である。
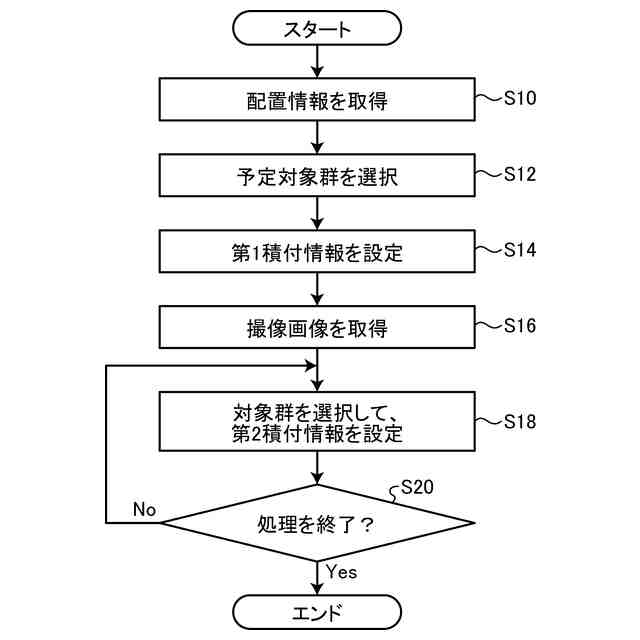
図7は、積付計画の設定の処理フローを説明するフローチャートである。
図8は、他の例を示す模式図である。
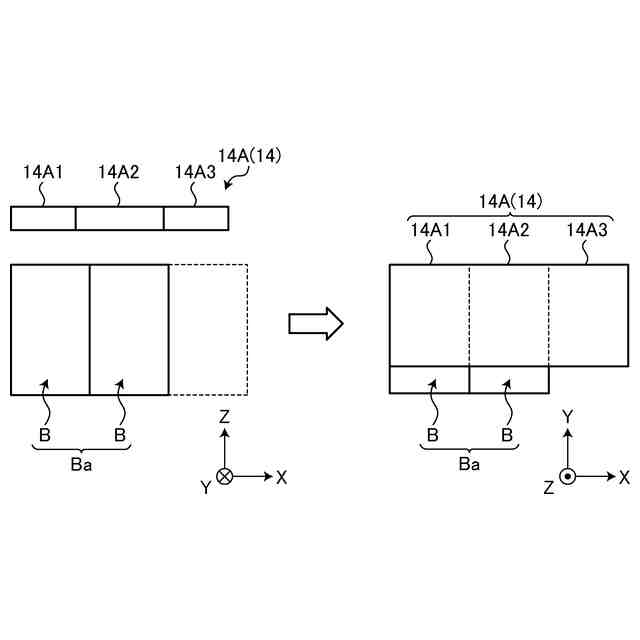
図9は、掴持位置の例を説明する模式図である。
図10は、掴持位置の例を説明する模式図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
収容箱
4か月前
個人
束ね具
18日前
個人
コンベア
6か月前
個人
段ボール箱
8か月前
個人
ゴミ収集器
8か月前
個人
段ボール箱
8か月前
個人
容器
10か月前
個人
楽ちんハンド
6か月前
個人
土嚢運搬器具
9か月前
個人
テープ引出機
18日前
個人
バンド
3か月前
個人
宅配システム
8か月前
個人
角筒状構造体
6か月前
個人
棒状体収容容器
22日前
個人
包装容器
2か月前
個人
閉塞装置
11か月前
個人
お薬の締結装置
7か月前
個人
コード類収納具
9か月前
個人
廃棄物収容容器
3か月前
個人
貯蔵サイロ
8か月前
個人
積み重ね用補助具
3か月前
個人
把手付米袋
5か月前
株式会社和気
包装用箱
10か月前
個人
ゴミ処理機
10か月前
個人
蓋閉止構造
5か月前
株式会社和気
包装用箱
1か月前
株式会社コロナ
梱包材
6か月前
株式会社バンダイ
物品
1か月前
個人
蓋閉止構造
5か月前
三甲株式会社
容器
7か月前
三甲株式会社
蓋体
9か月前
株式会社新弘
容器
4か月前
三甲株式会社
容器
7か月前
三甲株式会社
蓋体
10か月前
個人
袋入り即席麺
8か月前
株式会社イシダ
搬送装置
7か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ