TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025169280
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2025128096,2021199007
出願日
2025-07-31,2021-12-08
発明の名称
オペレータ検出システム
出願人
ヤマハ発動機株式会社
代理人
弁理士法人暁合同特許事務所
主分類
G05B
19/418 20060101AFI20251105BHJP(制御;調整)
要約
【課題】基板に対する作業を行う基板作業装置の周囲にいるオペレータをセンサによって検出する場合に、基板作業装置の配置が変更されてもセンサの位置や角度などを変更する工事を極力不要にすること。
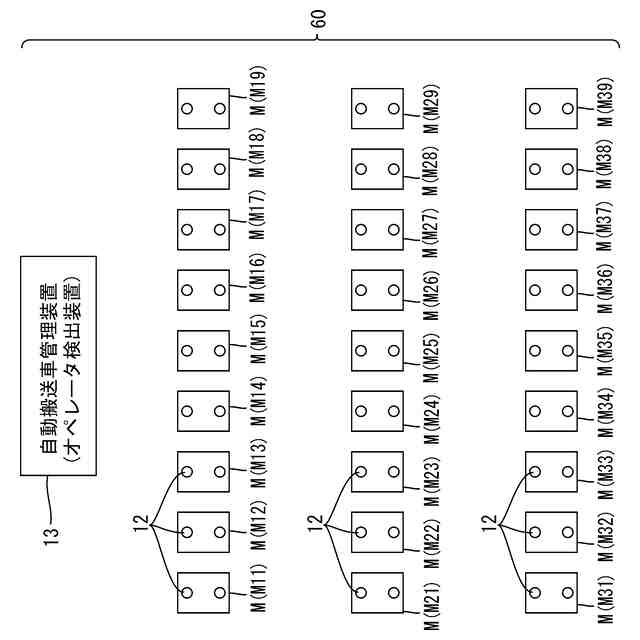
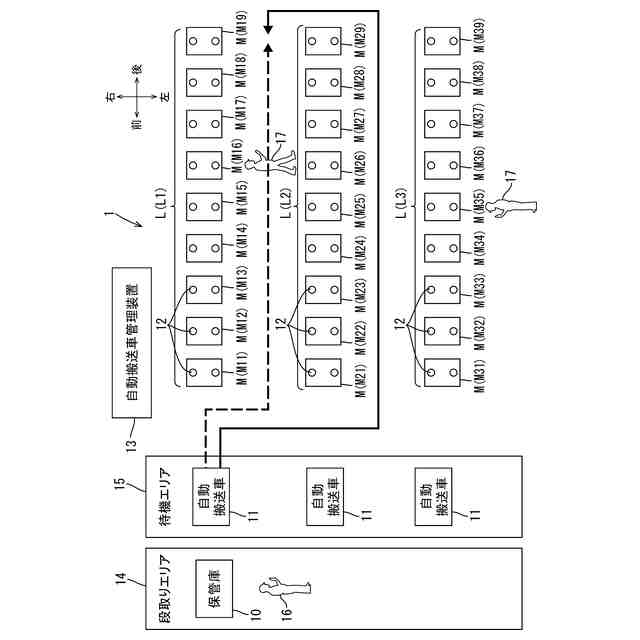
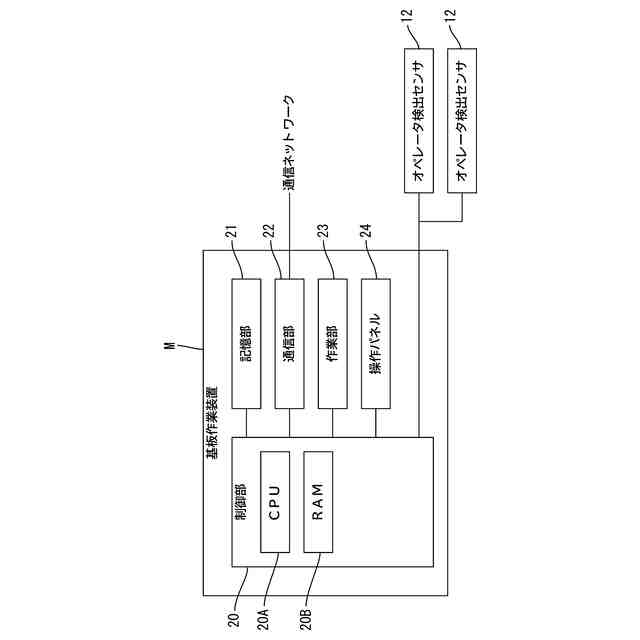
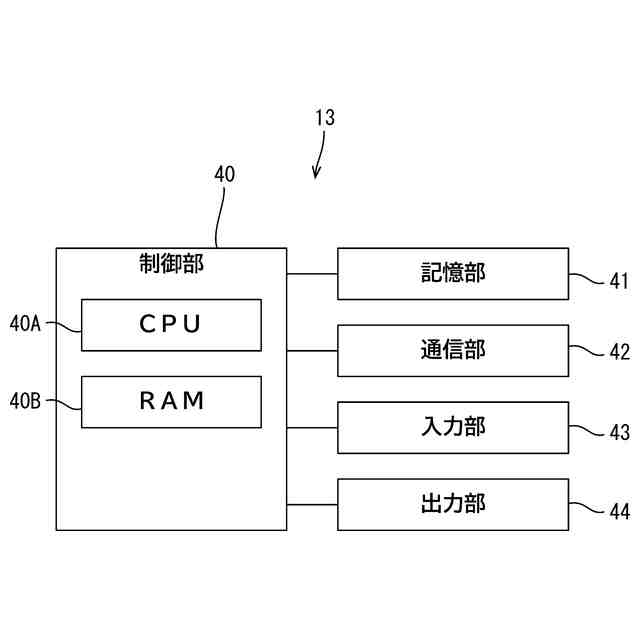
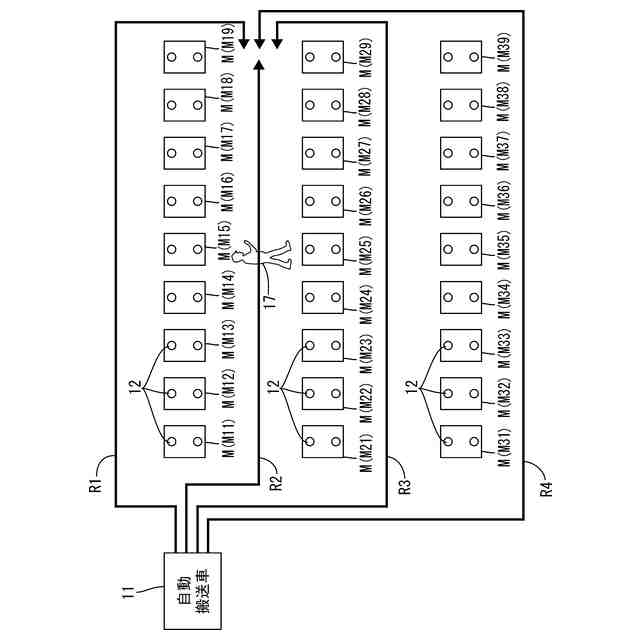
【解決手段】基板に対する作業を行う基板作業装置Mの周囲にいる設備オペレータ17を検出するオペレータ検出システム60であって、設備オペレータ17を検出するためのオペレータ検出センサ12と、オペレータ検出センサ12の検出信号に基づいて設備オペレータ17を検出する自動搬送車管理装置13(オペレータ検出装置)と、を備え、オペレータ検出センサ12が基板作業装置Mに配されている、オペレータ検出システム60。
【選択図】図5
特許請求の範囲
【請求項1】
基板に対する作業を行う基板作業装置の周囲にいるオペレータを検出するオペレータ検出システムであって、
オペレータを検出するための複数のセンサと、
前記センサの検出信号に基づいてオペレータを検出するオペレータ検出装置と、
を備え、
複数の前記基板作業装置にそれぞれ前記センサが配されており、
前記センサはカメラであり、
前記オペレータ検出装置は、前記カメラ毎に当該カメラで撮像された画像上で前記オペレータを検出して当該カメラに対する前記オペレータの角度方向を判断し、当該カメラを起点として前記角度方向に延びる直線を設定し、前記カメラ毎に設定した前記直線の交点を前記オペレータの位置として検出する、オペレータ検出システム。
続きを表示(約 890 文字)
【請求項2】
基板に対する作業を行う基板作業装置の周囲にいるオペレータを検出するオペレータ検出システムであって、
前記基板作業装置と、
オペレータを検出するための複数のセンサと、
前記基板作業装置と通信可能に接続されており、前記センサの検出信号に基づいてオペレータを検出するオペレータ検出装置と、
を備え、
複数の前記基板作業装置にそれぞれ前記センサが配されており、前記センサの検出信号が前記基板作業装置を介して前記オペレータ検出装置に送信され、
前記センサはカメラであり、
前記オペレータ検出装置は、前記カメラ毎に当該カメラで撮像された画像上で前記オペレータを検出して当該カメラに対する前記オペレータの角度方向を判断し、当該カメラを起点として前記角度方向に延びる直線を設定し、前記カメラ毎に設定した前記直線の交点を前記オペレータの位置として検出する、オペレータ検出システム。
【請求項3】
基板に対する作業を行う基板作業装置の周囲にいるオペレータを検出するオペレータ検出システムであって、
前記基板作業装置と、
オペレータを検出するための複数のセンサと、
を備え、
複数の前記基板作業装置にそれぞれ前記センサが配されており、
前記基板作業装置は、前記センサの検出信号に基づいてオペレータを検出するオペレータ検出装置としても機能し、
前記センサはカメラであり、
前記オペレータ検出装置は、前記カメラ毎に当該カメラで撮像された画像上で前記オペレータを検出して当該カメラに対する前記オペレータの角度方向を判断し、当該カメラを起点として前記角度方向に延びる直線を設定し、前記カメラ毎に設定した前記直線の交点を前記オペレータの位置として検出する、オペレータ検出システム。
【請求項4】
請求項1から請求項3のいずれか一項に記載のオペレータ検出システムであって、
種類の異なる複数の前記センサを備えている、オペレータ検出システム。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術はオペレータ検出システム及び自動搬送車管理システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、工場などにおいて、設備に補給する補給品などを自動搬送車によって自動搬送する場合に、搬送経路上の障害物(オペレータや何らかの物体など)をセンサによって検出することが行われている(例えば、特許文献1参照)。
具体的には、特許文献1には、自律車両の計画経路が横切る領域を監視下におく多数のカメラを配置し、自律車両が領域内の計画経路に沿って動いている間に、カメラを使用して、領域内の物体の存在を検出し、現在の位置における物体が、自律車両の計画経路を妨害している場合、自律車両の動きを変更することが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-109879号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した特許文献1には、工場の内壁、天井、柱、床などにカメラが配置されることが記載されている。しかしながら、工場の内壁、天井、柱、床などにカメラを配置すると、設備の配置が変更されて計画経路が変更になった場合にカメラの位置や角度などが合わなくなり、それらを変更する工事が必要になる。
本明細書では、基板に対する作業を行う基板作業装置の周囲にいるオペレータをセンサによって検出する場合に、基板作業装置の配置が変更されてもセンサの位置や角度などを変更する工事を極力不要にできる技術を開示する。
【課題を解決するための手段】
【0005】
基板に対する作業を行う基板作業装置の周囲にいるオペレータを検出するオペレータ検出システムであって、オペレータを検出するためのセンサと、前記センサの検出信号に基づいてオペレータを検出するオペレータ検出装置と、を備え、前記センサが前記基板作業装置に配されている。
【発明の効果】
【0006】
上記の構成によれば、基板に対する作業を行う基板作業装置の周囲にいるオペレータをセンサによって検出する場合に、基板作業装置の配置が変更されてもセンサの位置や角度などを変更する工事を極力不要にできる。
【図面の簡単な説明】
【0007】
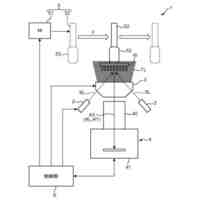
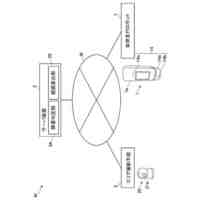
実施形態1に係る製造工場の模式図
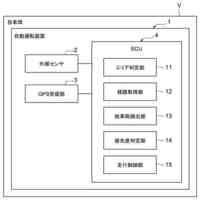
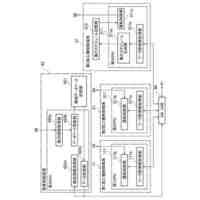
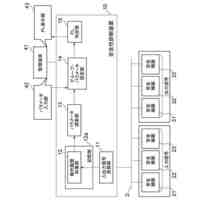
基板作業装置の電気的構成を示すブロック図
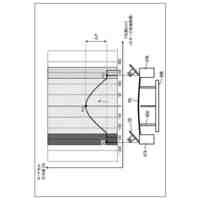
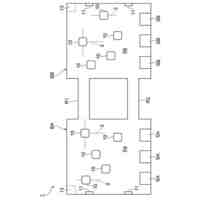
基板作業装置、オペレータ検出センサ及び設備オペレータを上側から見た模式図
自動搬送車管理装置の電気的構成を示すブロック図
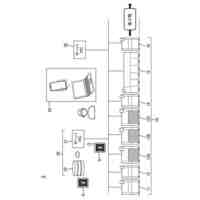
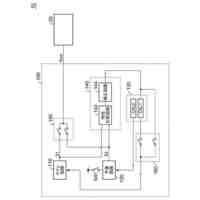
オペレータ検出システム(自動搬送車管理システを兼ねる)の模式図
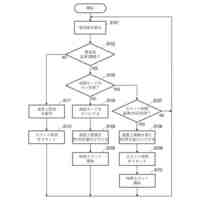
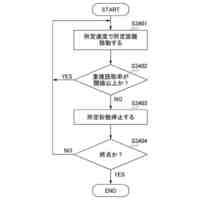
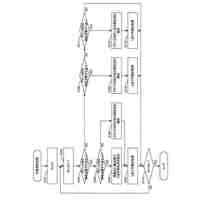
経路計画の作成のシーケンスチャート
経路計画の作成の具体例を示す模式図
実施形態2に係るオペレータ検出システム(自動搬送車管理システを兼ねる)の模式図
基板作業装置、オペレータ検出センサ及び設備オペレータを上側から見た模式図
全方位カメラによって撮像された360度画像の模式図
全方位カメラによって撮像された360度画像の模式図
実施形態3に係るオペレータ検出システムの模式図
実施形態4に係るオペレータ検出システム(自動搬送車管理システを兼ねる)の模式図
実施形態5に係る経路計画の具体例を示す模式図
実施形態6に係る基板作業装置への補給品の搬送の指示の具体例を示す模式図
実施形態7に係る基板作業装置の電気的構成を示すブロック図
【発明を実施するための形態】
【0008】
(本実施形態の概要)
(1)本開示に係るオペレータ検出システムは、基板に対する作業を行う基板作業装置の周囲にいるオペレータを検出するオペレータ検出システムであって、オペレータを検出するためのセンサと、前記センサの検出信号に基づいてオペレータを検出するオペレータ検出装置と、を備え、前記センサが前記基板作業装置に配されている。
【0009】
上記のオペレータ検出システムによると、基板作業装置にセンサが配されているので、基板作業装置の配置が変更されるとセンサの位置や角度も変更される。このため、基板作業装置の周囲にいるオペレータをセンサによって検出する場合に、基板作業装置の配置が変更されてもセンサの位置や角度などを変更する工事を極力不要にできる。
【0010】
(2)本開示に係るオペレータ検出システムは、基板に対する作業を行う基板作業装置の周囲にいるオペレータを検出するオペレータ検出システムであって、前記基板作業装置と、オペレータを検出するためのセンサと、前記基板作業装置と通信可能に接続されており、前記センサの検出信号に基づいてオペレータを検出するオペレータ検出装置と、を備え、前記センサが前記基板作業装置に配されており、前記センサの検出信号が前記基板作業装置を介して前記オペレータ検出装置に送信される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ヤマハ発動機株式会社
ワーク計測装置
18日前
ヤマハ発動機株式会社
挿抜装置および部品実装システム
3日前
ヤマハ発動機株式会社
部品実装装置およびテープフィーダ
4日前
ヤマハ発動機株式会社
基板の生産システム、及び画像解析装置
10日前
ヤマハ発動機株式会社
印刷機、表面実装機及び基板の反り測定方法
3日前
ヤマハ発動機株式会社
操船システム、操船システムの制御方法及び船舶
10日前
ヤマハ発動機株式会社
駆動システム、電動車椅子、制御方法およびコンピュータプログラム
5日前
ヤマハ発動機株式会社
ワーク面取得装置、ワーク面取得方法、ワーク面取得プログラムおよび記録媒体
5日前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社熊谷組
障害物の検出方法
2か月前
ローム株式会社
基準電圧源
3か月前
株式会社クボタ
作業車
10日前
株式会社クボタ
作業車
1か月前
新電元工業株式会社
作業用ロボット
1か月前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
11日前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社アサヒエンタープライズ
調整弁
26日前
カヤバ株式会社
減圧弁
2か月前
トヨタ自動車株式会社
クラッチペダル
3か月前
株式会社ダイフク
物品搬送設備
18日前
トヨタ自動車株式会社
制御装置
2か月前
キヤノン株式会社
配送システム
3か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
エイブリック株式会社
電流補償回路及び半導体装置
1か月前
日野自動車株式会社
自動運転装置
2か月前
株式会社アマダ
工作機械制御装置
2か月前
RFルーカス株式会社
自動棚卸ロボット
5日前
株式会社CAOS
移動体の制御システム
3か月前
村田機械株式会社
搬送車システム
2か月前
株式会社TMEIC
安全性診断装置
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ