TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025167267
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024071726
出願日
2024-04-25
発明の名称
イナーシャ推定方法およびイナーシャ推定装置
出願人
オークマ株式会社
代理人
弁理士法人YKI国際特許事務所
主分類
H02P
29/40 20160101AFI20251030BHJP(電力の発電,変換,配電)
要約
【課題】工作機械等の位置制御装置におけるワークイナーシャ推定にて、トルク定数や駆動系のイナーシャのばらつきに起因する推定誤差を除去する。
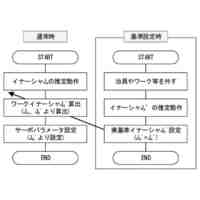
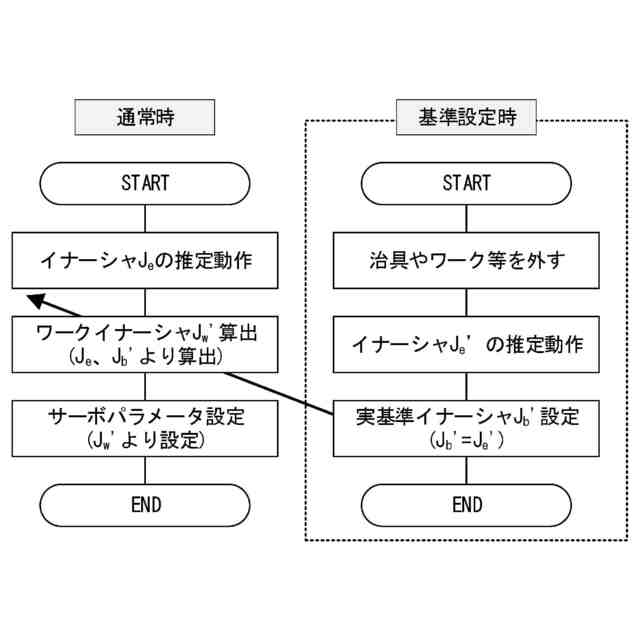
【解決手段】イナーシャの推定方法は、駆動系にワークを取り付けた状態で、前記駆動系を加減速させ、そのときの前記駆動系のトルクおよび加速度に基づいて、前記ワークを含む前記駆動系のイナーシャをモータ軸換算総イナーシャJn≒Jeとして推定し、前記駆動系から前記ワークを取り外した状態で、前記駆動系を加減速させ、そのときの前記駆動系のトルクおよび加速度に基づいて、前記ワークを含まない前記駆動系のイナーシャを、実基準イナーシャJb’として推定し、少なくとも、前記モータ軸換算総イナーシャJeと、前記実基準イナーシャJb’と、に基づいて前記ワークのイナーシャJw’を推定する。
【選択図】図1
特許請求の範囲
【請求項1】
イナーシャ推定方法であって、
駆動系にワークを取り付けた状態で、前記駆動系を加減速させ、そのときの前記駆動系のトルクおよび加速度に基づいて、前記ワークを含む前記駆動系のイナーシャをモータ軸換算総イナーシャとして推定し、
前記駆動系から前記ワークを取り外した状態で、前記駆動系を加減速させ、そのときの前記駆動系のトルクおよび加速度に基づいて、前記ワークを含まない前記駆動系のイナーシャを、実基準イナーシャとして推定し、
少なくとも、前記モータ軸換算総イナーシャと、前記実基準イナーシャと、に基づいて前記ワークのイナーシャを推定する、
ことを特徴とするイナーシャ推定方法。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載のイナーシャ推定方法であって、
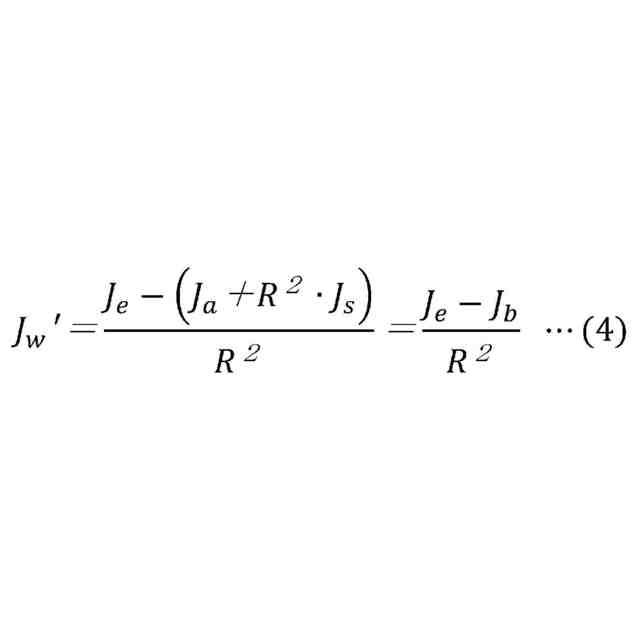
前記実基準イナーシャをJb’、前記モータ軸換算総イナーシャをJe、前記駆動系の総変速比をRとした場合、前記ワークのイナーシャ推定値Jw’は、Jw’=(Je-Jb’)/R
2
として算出する、ことを特徴とするイナーシャ推定方法。
【請求項3】
請求項1または2に記載のイナーシャ推定方法であって、さらに、
前記実基準イナーシャに対する前記ワークのイナーシャの比率をワークイナーシャ相対値として算出し、
前記ワークイナーシャ相対値に基づいて、前記駆動系を制御するためのサーボパラメータを決定する、
ことを特徴とするイナーシャ推定方法。
【請求項4】
請求項3に記載のイナーシャ推定方法であって、
前記ワークイナーシャ相対値を、(Je-Jb’)/(R
2
・Jb’)として算出する、ことを特徴とするイナーシャ推定方法。
【請求項5】
請求項1に記載のイナーシャ推定方法であって、さらに、
前記駆動系にイナーシャが既知の校正用ワークを取り付けた状態で、前記駆動系を加減速させ、そのときの前記駆動系のトルクおよび加速度に基づいて、前記校正用ワークを含む前記駆動系のイナーシャを第2の実基準イナーシャとして推定し、
前記ワークのイナーシャを、前記モータ軸換算総イナーシャと、前記実基準イナーシャと、前記第2の実基準イナーシャと、に基づいて推定する、
ことを特徴とするイナーシャ推定方法。
【請求項6】
請求項5に記載のイナーシャ推定方法であって、
前記実基準イナーシャをJb’、前記モータ軸換算総イナーシャをJe、前記駆動系の総変速比をR、前記第2の実基準イナーシャをJb”、前記校正用ワークのイナーシャをJwbとした場合、前記ワークのイナーシャ推定値Jw’を、Jw’=Jwb(Je-Jb’)/(Jb”-Jb’)として算出する、ことを特徴とするイナーシャ推定方法。
【請求項7】
イナーシャを推定するイナーシャ推定装置であって、
前記駆動系を加減速させたときの前記駆動系のトルクおよび加速度に基づいて、前記駆動系のイナーシャを算出するイナーシャ演算部と、
前記イナーシャ演算部で算出されたイナーシャを一時的に記憶するイナーシャ保存部と、
を備え、前記イナーシャ演算部は、
ワークを取り付けた状態の前記駆動系のイナーシャを推定し、推定された前記イナーシャをモータ軸換算総イナーシャとして前記イナーシャ保存部に保存し、
前記ワークを取り外した状態の前記駆動系のイナーシャを推定し、推定された前記イナーシャを実基準イナーシャとして前記イナーシャ保存部に保存し、
少なくとも、前記モータ軸換算総イナーシャと、前記実基準イナーシャと、に基づいて前記ワークのイナーシャを推定する、
ように構成される、ことを特徴とするイナーシャ推定装置。
【請求項8】
請求項7に記載のイナーシャ推定装置であって、
前記実基準イナーシャをJb’、前記モータ軸換算総イナーシャをJe、前記駆動系の総変速比をRとした場合、前記イナーシャ演算部は、前記ワークのイナーシャ推定値Jw’を、Jw’=(Je-Jb’)/R
2
として算出する、ことを特徴とするイナーシャ推定装置。
【請求項9】
請求項7または8に記載のイナーシャ推定装置であって、
前記イナーシャ演算部は、さらに、
前記実基準イナーシャに対する前記ワークのイナーシャの比率をワークイナーシャ相対値として算出する、ことを特徴とするイナーシャ推定装置。
【請求項10】
請求項9に記載のイナーシャ推定装置であって、
前記イナーシャ演算部は、前記ワークイナーシャ相対値を、(Je-Jb’)/(R
2
・Jb’)として算出する、ことを特徴とするイナーシャ推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書は、工作機械等におけるイナーシャ推定方法、および、イナーシャ推定装置を開示する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
工作機械などの送り軸をサーボモータで駆動する場合、位置・速度制御系を構成し、数値制御装置からの指令に従い、モータやモータに取り付けられた負荷の位置・速度を制御する。モータや負荷の位置・速度を正確に制御するためには、モータや負荷のイナーシャに基づいて制御パラメータを決定する必要がある。負荷のイナーシャは工作物によって変動することから、種々のイナーシャ推定方法が提案されている。
【0003】
イナーシャの推定方法の一例として、駆動軸を加減速させた時の、加速もしくは減速している区間を積算区間とし、積算区間におけるモータ加速度検出値の積算値およびモータトルクの積算値からモータ軸換算の負荷イナーシャを推定する技術が特許文献1等で開示されている。
【0004】
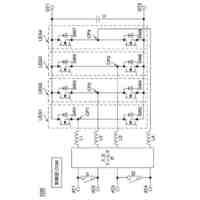
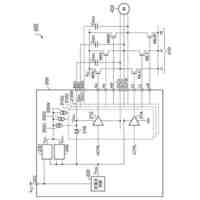
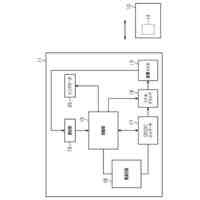
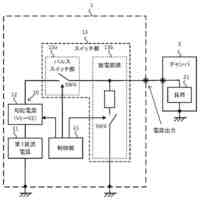
図6は、従来のイナーシャ推定装置のブロック図である。位置指令生成部1で生成した位置指令値Pcと、位置検出器5で検出したモータ4または負荷6の位置検出値Pdの偏差を減算器7にて演算する。減算器7で演算した偏差をFB制御器2に入力すると、FB制御器2はトルク指令Tcを出力する。電流制御器3は、トルク指令Tcに従い、負荷6が取り付けられたモータ4を駆動する。イナーシャ演算部11は、位置指令値Pcの2階微分値から、加速もしくは減速している区間を算出する。また、イナーシャ演算部11は、位置検出値Pdの2階微分値およびトルク指令Tcからイナーシャ演算を行う。イナーシャ演算部11の出力は、後述するワークイナーシャJwである。
【0005】
また、イナーシャに応じて制御パラメータを変更する方法として、特許文献2には、予め複数のワークイナーシャ値毎の基準制御パラメータを記憶しており、実際に取り扱うワークのイナーシャ値に応じて、機械の制御特性にあった制御パラメータを記憶された基準制御パラメータから算出して、前記算出された制御パラメータに変更する技術が開示されている。
【0006】
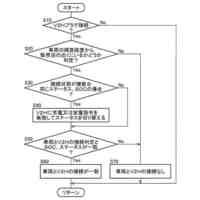
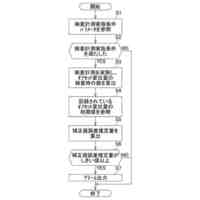
上記特許文献1および特許文献2の技術を用いたサーボパラメータ変更方法の一例を説明する。図5にイナーシャ推定およびサーボパラメータ設定の動作チャートを示す。まず、特許文献1等に記載の技術を用いて駆動系のイナーシャの推定を行う。次に、推定したイナーシャからワークイナーシャを算出する。そして、算出したワークイナーシャに応じたサーボパラメータを設定する。
【先行技術文献】
【特許文献】
【0007】
特許第6009397号公報
特許第6290619号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1では、摩擦分や重力分をキャンセルしてイナーシャ推定を行っている。しかし、特許文献1ではモータのトルク定数や、減速機イナーシャのばらつき等による推定誤差を考慮していない。そのため、特許文献1の技術を用いてワークイナーシャを推定し、特許文献2に記載のサーボパラメータ変更技術を用いると、イナーシャ推定誤差により適切なパラメータが選択できない場合がある。
【0009】
本課題について、数式を用いて説明する。まず、運動している対象物のトルクτ、対象物のイナーシャJ、対象物の角加速度αは、以下の(1)式で表される。
JPEG
2025167267000002.jpg
16
170
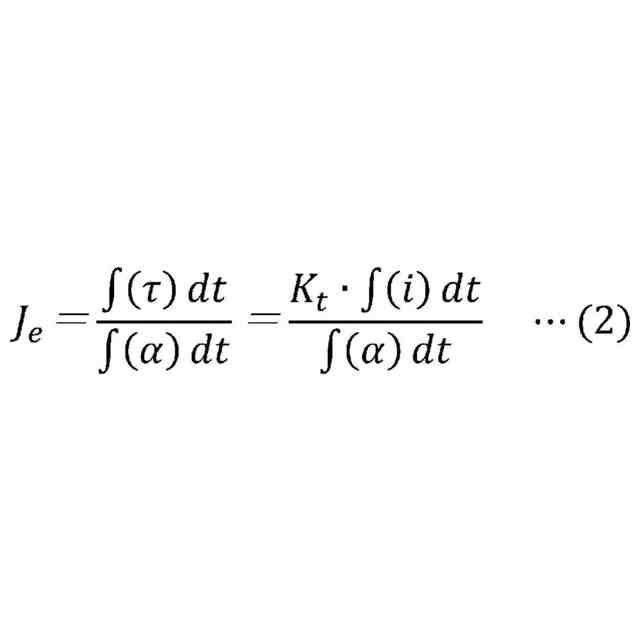
【0010】
イナーシャ推定では、上記関係式を利用し、対象物を加減速動作させた時の加速もしくは減速している区間を積算区間とし、積算区間におけるモータトルクの積算値、およびモータの加速度検出値の積算値から、モータ軸換算総イナーシャの推定値Jeを算出する。
JPEG
2025167267000003.jpg
22
170
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
オークマ株式会社
主軸旋回装置
1か月前
オークマ株式会社
イナーシャ推定方法およびイナーシャ推定装置
16日前
オークマ株式会社
タッチプローブの補正値検査システム及び補正値検査方法
18日前
個人
高圧電気機器の開閉器
4日前
個人
電気を重力で発電装置
17日前
キヤノン電子株式会社
モータ
16日前
キヤノン電子株式会社
モータ
24日前
コーセル株式会社
電源装置
25日前
トヨタ自動車株式会社
モータ
16日前
株式会社アイドゥス企画
減反モータ
4日前
トヨタ自動車株式会社
固定子の加熱装置
27日前
矢崎総業株式会社
電源回路
3日前
ローム株式会社
モータドライバ回路
11日前
日産自動車株式会社
ロータシャフト
11日前
日産自動車株式会社
ロータシャフト
11日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
11日前
トヨタ自動車株式会社
ステータの製造装置
17日前
株式会社明治ゴム化成
ワイヤレス給電用部品
26日前
株式会社アイシン
電力変換装置
16日前
京商株式会社
模型用非接触電力供給システム
4日前
株式会社マキタ
電動作業機
24日前
トヨタ紡織株式会社
ロータの製造装置
25日前
個人
電線盗難防止方法及び電線盗難防止装置
24日前
トヨタ自動車株式会社
可変界磁ロータ
19日前
トヨタ自動車株式会社
車両照合システム
24日前
本田技研工業株式会社
回転電機用ロータ
4日前
大阪瓦斯株式会社
充放電中継装置
17日前
大阪瓦斯株式会社
充放電中継装置
17日前
ニデック株式会社
回転電機
16日前
株式会社豊田自動織機
電力供給システム
16日前
ルネサスエレクトロニクス株式会社
半導体装置
16日前
豊田合成株式会社
車両用非接触充電装置
16日前
株式会社豊田中央研究所
分散電源システム
11日前
個人
電動自動車用同期電動機の変速方法と駆動制御装置
18日前
日動電工株式会社
壁内配線用のブランクプレート
3日前
株式会社京三製作所
パルス電源装置
3日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ