TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165501
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069569
出願日
2024-04-23
発明の名称
センサマット構造、および、ステアリング装置
出願人
豊田合成株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
1/04 20060101AFI20251028BHJP(鉄道以外の路面車両)
要約
【課題】運転者が把持部を把持していない場合に把持が誤検知されることを抑制する。
【解決手段】移動体に備えられるステアリング装置の把持部に設けられるセンサマット構造は、導電性を有する導電布の層である導電布層を含むセンサ部であって、移動体の運転者の手と導電布層との間の静電容量を利用して、運転者による把持部の把持を検知するためのセンサ部を備える。センサ部は、導電布層を含む第1部分と、導電布層を含む第2部分と、を有し、第2部分における把持の検知の感度が、第1部分における把持の検知の感度よりも低くなるように構成されている。
【選択図】図4
特許請求の範囲
【請求項1】
移動体に備えられるステアリング装置の把持部に設けられるセンサマット構造であって、
導電性を有する導電布の層である導電布層を含むセンサ部であって、前記移動体の運転者の手と前記導電布層との間の静電容量を利用して、前記運転者による前記把持部の把持を検知するためのセンサ部を備え、
前記センサ部は、
前記導電布層を含む第1部分と、前記導電布層を含む第2部分と、を有し、
前記第2部分における前記把持の検知の感度が、前記第1部分における前記把持の検知の感度よりも低くなるように構成されている、センサマット構造。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載のセンサマット構造であって、
前記第1部分は、前記把持部の正面側に配置され、前記第2部分は、前記把持部の背面側に配置される、センサマット構造。
【請求項3】
請求項1に記載のセンサマット構造であって、
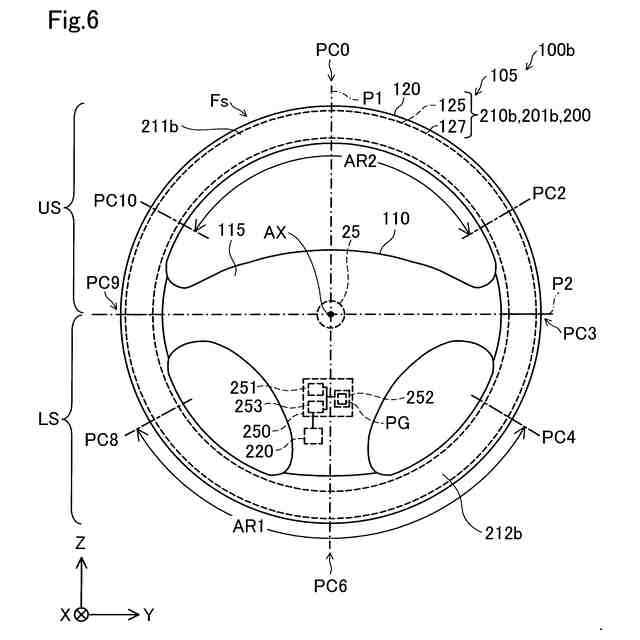
前記第2部分は、前記ステアリング装置が前記移動体の進行方向として直進方向を指定している基本状態において、前記把持部のうち、前記把持部の回転軸を含み前記移動体の左右方向と平行な基準平面よりも下側に位置する下側部分に配置される、センサマット構造。
【請求項4】
請求項3に記載のセンサマット構造であって、
前記第2部分は、前記基本状態において、前記把持部を前記把持部の正面側から見たときの前記回転軸から直上の方向を0時方向としたときに、前記回転軸を中心とする4時方向から8時方向までの角度範囲に配置されている、センサマット構造。
【請求項5】
請求項3に記載のセンサマット構造であって、
前記第1部分は、前記基本状態において、前記把持部のうち前記基準平面よりも上側に位置する上側部分に配置される、センサマット構造。
【請求項6】
請求項5に記載のセンサマット構造であって、
前記第1部分は、前記基本状態において、前記把持部を前記把持部の正面側から見たときの前記回転軸から直上の方向を0時方向としたときに、前記回転軸を中心とする10時方向から2時方向までの角度範囲に配置されている、センサマット構造。
【請求項7】
請求項1に記載のセンサマット構造であって、
前記第2部分における前記導電布の粗さは、前記第1部分における前記導電布の粗さよりも粗い、センサマット構造。
【請求項8】
請求項1に記載のセンサマット構造であって、
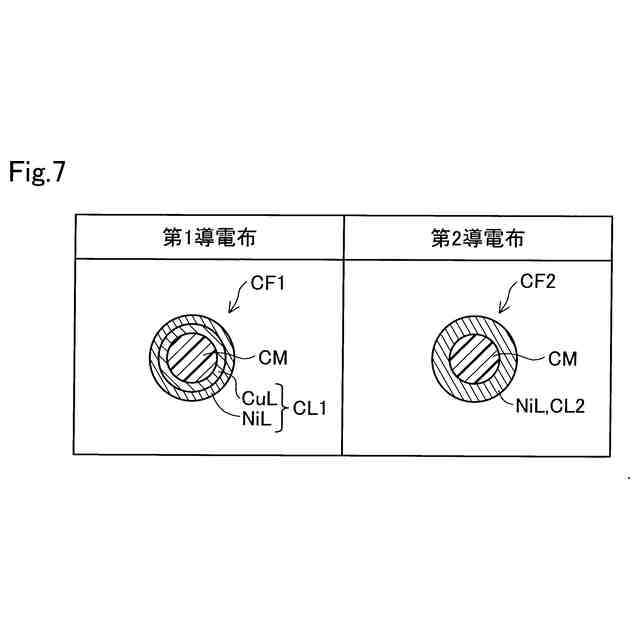
前記導電布は、芯材と、前記芯材の周囲を覆う導電性の導電層と、を有する繊維によって構成され、
前記第1部分における前記導電層は、銅を主成分として含む銅層を有し、
前記第2部分における前記導電層は、前記銅よりも低い導電率を有する導体を主成分として含む層を有し、前記銅層を有しない、センサマット構造。
【請求項9】
請求項1から8のいずれか一項に記載のセンサマット構造であって、
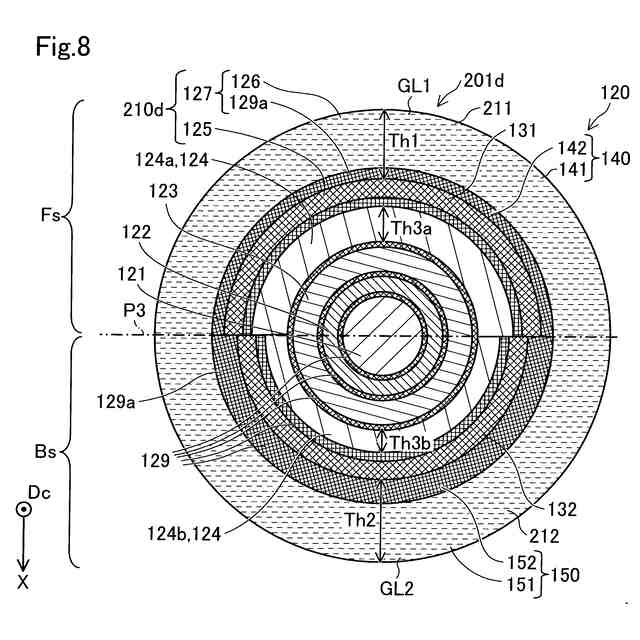
前記センサ部は、前記把持部において前記導電布層の外側に積層される表層部であって、絶縁性を有する表層部を有し、
前記第1部分と前記第2部分とは、前記表層部を含み、
前記第2部分における前記表層部の厚みは、前記第1部分における前記表層部の厚みよりも厚い、センサマット構造。
【請求項10】
移動体に備えられるステアリング装置であって、
回転軸周りに回転可能に構成され、前記移動体の運転者によって把持される把持部と、
導電性を有する導電布の層である導電布層を含み、前記把持部に設けられるセンサ部であって、前記運転者の手と前記導電布層との間の静電容量を利用して、前記運転者による前記把持部の把持を検知するためのセンサ部と、を備え、
前記センサ部は、前記導電布層を含む第1部分と、前記導電布層を含む第2部分とを有し、
前記第2部分における前記把持の検知の感度は、前記第1部分における前記把持の検知の感度よりも低くなるように構成されている、ステアリング装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、センサマット構造、および、ステアリング装置に関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
移動体に備えられたステアリング装置の把持部を移動体の運転者が把持しているか否かを検知する技術が知られている。例えば、特許文献1には、ステアリング装置の把持部に設けられたシート状のセンサを用いて、運転者による把持部への接触を検知することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-55420号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術では、運転者の膝や太腿といった運転者の手以外のものが把持部に接触した場合に、実際には運転者の手によって把持部が把持されていないにもかかわらず、把持部が把持されていると誤検知される虞があった。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、移動体に備えられるステアリング装置の把持部に設けられるセンサマット構造が提供される。このセンサマット構造は、導電性を有する導電布の層である導電布層を含むセンサ部であって、前記移動体の運転者の手と前記導電布層との間の静電容量を利用して、前記運転者による前記把持部の把持を検知するためのセンサ部を備える。前記センサ部は、前記導電布層を含む第1部分と、前記導電布層を含む第2部分と、を有し、前記第2部分における前記把持の検知の感度が、前記第1部分における前記把持の検知の感度よりも低くなるように構成されている。
この形態によれば、把持部のうち運転者の手とは異なるものが触れやすい部分に第2部分を位置させることで、運転者が把持部を把持していない場合に把持が誤検知されることを抑制できる。
(2)上記形態において、前記第1部分は、前記把持部の正面側に配置され、前記第2部分は、前記把持部の背面側に配置されてもよい。この形態によれば、把持部の背面側に運転者の膝または太腿が触れることに起因する把持の誤検知を抑制できる。
(3)上記形態において、前記第2部分は、前記ステアリング装置が前記移動体の進行方向として直進方向を指定している基本状態において、前記把持部のうち、前記把持部の回転軸を含み前記移動体の左右方向と平行な基準平面よりも下側に位置する下側部分に配置されてもよい。この形態によれば、把持部の下側部分に運転者の膝または太腿が触れることに起因する把持の誤検知を抑制できる。
(4)上記形態において、前記第2部分は、前記基本状態において、前記把持部を前記把持部の正面側から見たときの前記回転軸から直上の方向を0時方向としたときに、前記回転軸を中心とする4時方向から8時方向までの角度範囲に配置されてもよい。この形態によれば、把持部の下側部分に運転者の膝または太腿が触れることに起因する把持の誤検知をより効果的に抑制できる。
(5)上記形態において、前記第1部分は、前記基本状態において、前記把持部のうち前記基準平面よりも上側に位置する上側部分に配置されてもよい。この形態によれば、下側部分における把持の誤検知の抑制と、上側部分における適切な把持の検知とを両立できる。
(6)上記形態において、前記第1部分は、前記基本状態において、前記把持部を前記把持部の正面側から見たときの前記回転軸から直上の方向を0時方向としたときに、前記回転軸を中心とする10時方向から2時方向までの角度範囲に配置されていてもよい。この形態によれば、下側部分における把持の誤検知の抑制と、上側部分における適切な把持の検知とをより効果的に両立できる。
(7)上記形態では、前記第2部分における前記導電布の粗さは、前記第1部分における前記導電布の粗さよりも粗くてもよい。この形態によれば、第2部分における導電布の粗さをより粗くすることで、あるいは、第1部分における導電布の粗さをより密にすることで、簡易に、第2部分における検知の感度を第1部分における検知の感度よりも低くできる。
(8)上記形態では、前記導電布は、芯材と、前記芯材の周囲に位置する導電層と、を有する繊維によって構成され、前記第1部分における前記導電層は、銅を主成分として含む銅層を有し、前記第2部分における前記導電層は、前記銅よりも低い導電率を有する金属材料を主成分として含む層を有し、前記銅層を有しなくてもよい。この形態によれば、第2部分における導電布を構成する繊維に銅層を設けないことで、簡易に、第2部分における検知の感度を第1部分における検知の感度よりも低くできる。
(9)上記形態では、前記センサ部は、前記把持部において前記導電布層の外側に積層される表層部であって、絶縁性を有する表層部を有し、前記第1部分と前記第2部分とは、前記表層部を含み、前記第2部分における前記表層部の厚みは、前記第1部分における前記表層部の厚みよりも厚くてもよい。この形態によれば、第2部分における表層部の厚みをより厚くすることで、あるいは、第1部分における表層部の厚みをより薄くすることで、簡易に、第2部分における検知の感度を第1部分における検知の感度よりも低くできる。
本開示は、上述したセンサマット構造としての形態以外にも、例えば、ステアリング装置や、移動体や、センサマット構造の製造方法や、ステアリング装置の製造方法などの種々の形態で実現することが可能である。
【図面の簡単な説明】
【0007】
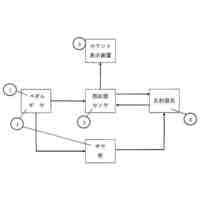
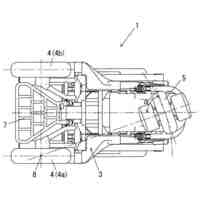
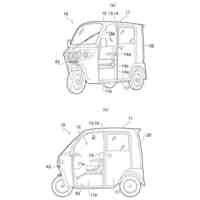
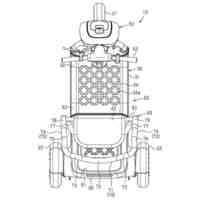
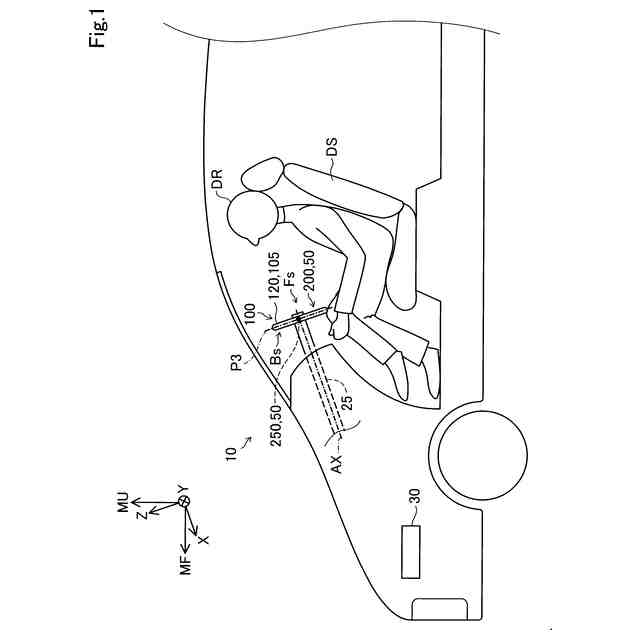
第1実施形態における把持検知システムの概略構成を示す説明図。
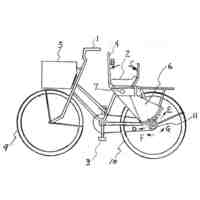
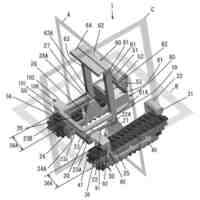
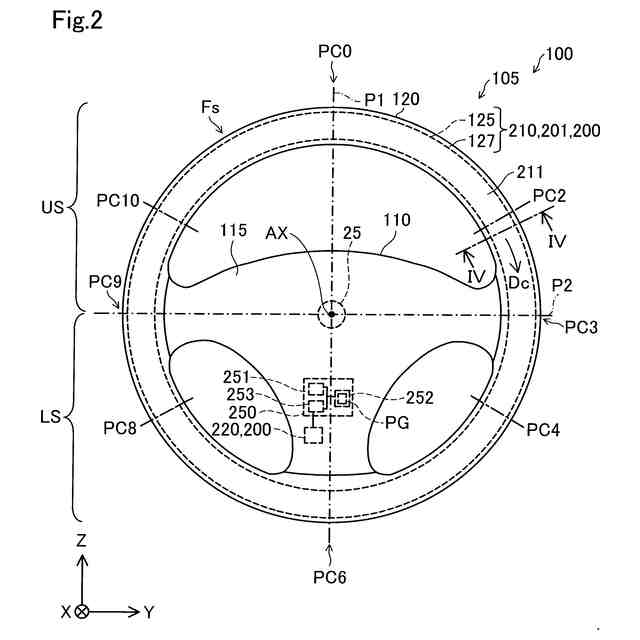
第1実施形態におけるステアリング装置の概略構成を示す第1の説明図。
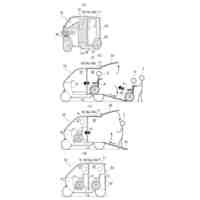
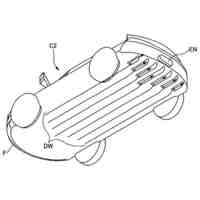
第1実施形態におけるステアリング装置の概略構成を示す第2の説明図。
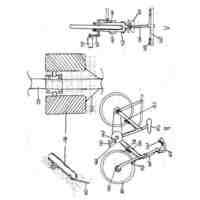
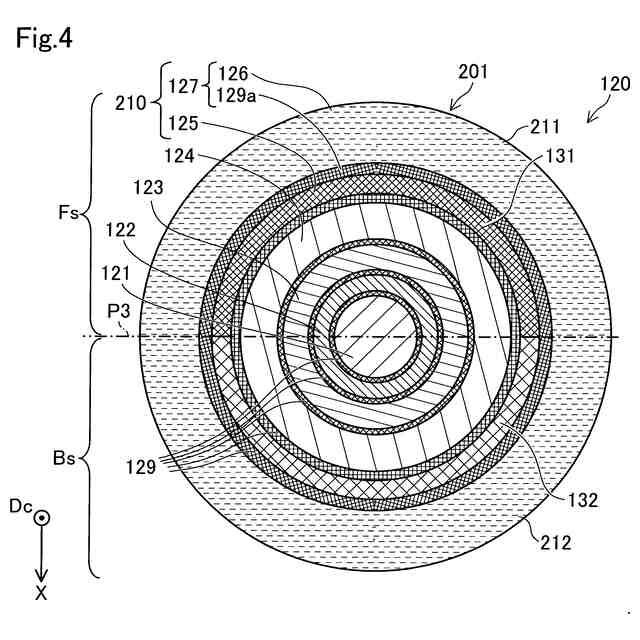
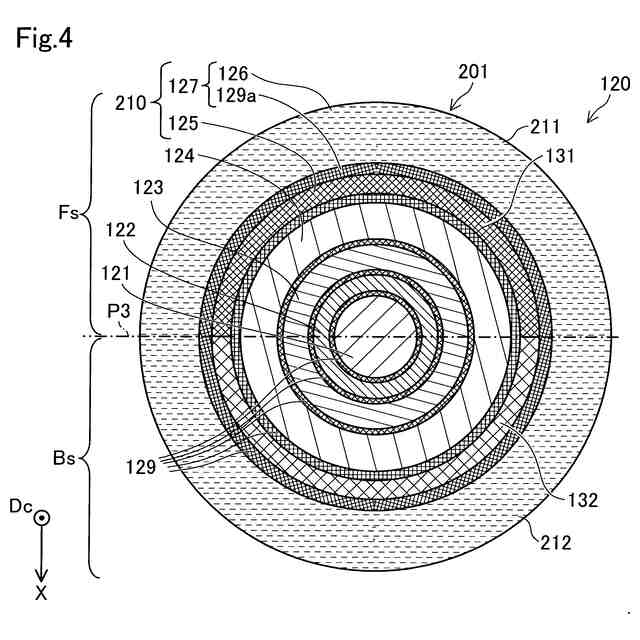
図2および図3のIV-IV断面図。
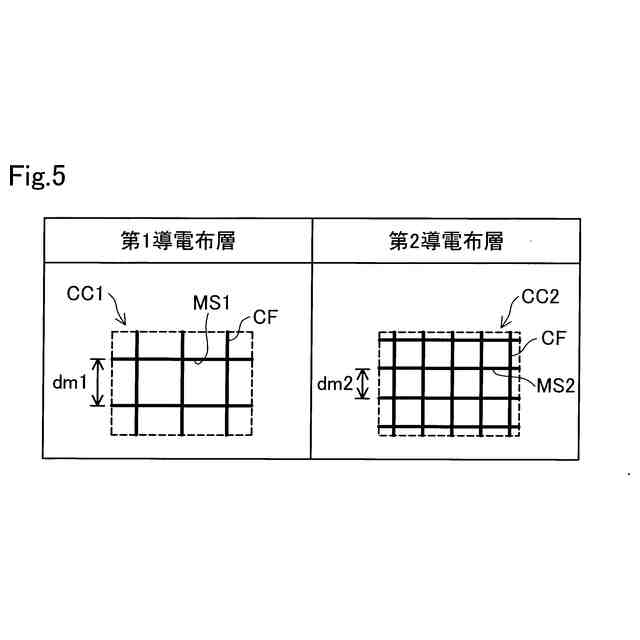
第1実施形態における第1導電布と第2導電布とを説明する図。
第2実施形態におけるステアリング装置を示す説明図。
第3実施形態における第1繊維および第2繊維を示す説明図。
第4実施形態における把持部の断面図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
図1は、第1実施形態における把持検知システム50の概略構成を示す説明図である。把持検知システム50は、移動体としての車両10に備えられている。車両10は、ステアリング装置100を備える。
【0009】
把持検知システム50は、車両10の運転者DRによるステアリング装置100の把持を検知するために用いられる。「ステアリング装置100の把持」とは、具体的には、後述する把持部120の把持を意味する。また、本開示において、「把持」は、運転者DRが手で把持部120を握ることだけではなく、運転者DRの手が把持部120に接触することを含む。把持検知システム50は、タッチセンサ200と、検知装置250とを備える。タッチセンサ200および検知装置250の詳細については後述する。
【0010】
車両10は、例えば、乗用車や、バスや、トラックなどである。車両10は、車両10の推進力を発生させる駆動用アクチュエータと、車両10の制動力を発生させる制動用アクチュエータと、車両10の進行方向を変更する操舵用アクチュエータと、これらを制御する運転制御装置30とを備えている。運転制御装置30は、動作モードとして、手動運転モードと自動運転モードとを有している。手動運転モードでは、運転制御装置30は、アクセルペダルやブレーキペダルやステアリング装置100に対する運転者DRの操作に応じて駆動用アクチュエータと制動用アクチュエータと操舵用アクチュエータとを制御することにより、車両10を走行させる。自動運転モードでは、運転制御装置30は、駆動用アクチュエータと制動用アクチュエータと操舵用アクチュエータとの少なくとも一つを自動で制御することにより、車両10を走行させることができる。こうした各アクチュエータの自動制御により、運転制御装置30は、米国自動車技術者協会(SAE:Society of Automotive Engineers)により定義されたレベル1からレベル5までの自動運転を実現することができる。運転制御装置30は、例えば、自動運転から手動運転への移行に際して、運転者DRに把持部120を把持していることを要求する。なお、SAEにより定義されたレベル1からレベル2までの自動運転のことを運転支援ともいう。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
5か月前
個人
走行装置
5か月前
個人
三輪バイク
1か月前
個人
台車
17日前
個人
乗り物
7か月前
個人
電動走行車両
5か月前
個人
閂式ハンドル錠
5か月前
個人
電動モビリティ
9か月前
個人
駐輪設備
3か月前
個人
自転車用歩数計
1か月前
個人
発音装置
9か月前
個人
ボギー・フレーム
3か月前
個人
“zen-go.”
4か月前
個人
ルーフ付きトライク
4か月前
個人
三輪電動車両
1か月前
個人
ルーフ付きトライク
3か月前
個人
自由方向乗車自転車
9か月前
個人
車の室内高温防止屋根
1か月前
個人
パワーアシスト自転車
3か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
10か月前
個人
ステアリングの操向部材
10か月前
個人
電動式ルーフ付きトライク
9日前
個人
電動式ルーフ付きトライク
9日前
個人
フロントフットブレーキ。
5か月前
個人
電動式ルーフ付きトライク
9日前
井関農機株式会社
収穫作業車両
3日前
株式会社豊田自動織機
産業車両
6か月前
個人
乗用自動車のディフューザー
2か月前
豊田鉄工株式会社
小型車両
5か月前
個人
ホイールハブ駆動構造
6か月前
学校法人千葉工業大学
車両
11か月前
学校法人千葉工業大学
車両
11か月前
学校法人千葉工業大学
車両
11か月前
ヤマハ発動機株式会社
自転車
5か月前
船井電機株式会社
車両
3か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ