TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025165326
公報種別
公開特許公報(A)
公開日
2025-11-04
出願番号
2024069377
出願日
2024-04-22
発明の名称
船舶情報測定プログラム、船舶情報測定方法及び船舶情報測定装置
出願人
富士通株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
G08G
3/00 20060101AFI20251027BHJP(信号)
要約
【課題】船舶の寸法、方位、位置等の船舶情報について容易で且つ正確な測定を行う船舶情報測定プログラム、船舶情報測定方法及び船舶情報測定装置を提供する。
【解決手段】所定の船舶を画像取得装置で撮影して所定の船舶の撮影画像を取得し、画像から船舶における特徴点を抽出する機械学習モデルに、取得した撮影画像を入力して得られる出力を基に、撮影画像における所定の船舶の特徴点を抽出し、画像取得装置から所定の船舶が位置する水平面までの距離を取得し、画像取得装置の水平面に対する傾斜角を取得し、撮影画像における特徴点の位置、距離及び傾斜角に基づいて、所定の船舶の船舶情報を特定する処理をコンピュータに実行させる。
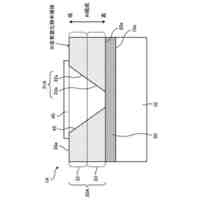
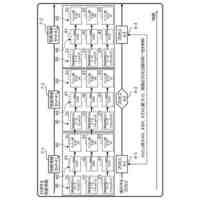
【選択図】図1
特許請求の範囲
【請求項1】
所定の船舶を画像取得装置で撮影して前記所定の船舶の撮影画像を取得し、
画像から船舶における特徴点を抽出する機械学習モデルに、取得した前記撮影画像を入力して得られる出力を基に、前記撮影画像における前記所定の船舶の特徴点を抽出し、
前記画像取得装置から前記所定の船舶が位置する水平面までの距離を取得し、
前記画像取得装置の前記水平面に対する傾斜角を取得し、
前記撮影画像における前記特徴点の位置、前記距離及び前記傾斜角に基づいて、前記所定の船舶の船舶情報を特定する
処理をコンピュータに実行させることを特徴とする船舶情報測定プログラム。
続きを表示(約 1,100 文字)
【請求項2】
前記特徴点として船舶の寸法の定義に応じた点を抽出するように前記機械学習モデルに学習させる処理を前記コンピュータにさらに実行させることを特徴とする請求項1に記載の船舶情報測定プログラム。
【請求項3】
前記特徴点の抽出の処理において、
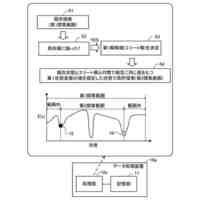
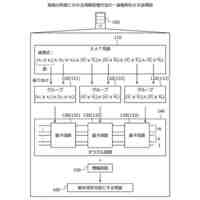
前記機械学習モデルから出力された前記特徴点の前記撮影画像における確率分布を取得し、
前記確率分布を基に前記特徴点の位置を特定する
処理を前記コンピュータに実行させることを特徴とする請求項1に記載の船舶情報測定プログラム。
【請求項4】
前記船舶情報の特定の処理において、
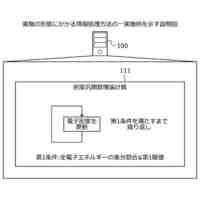
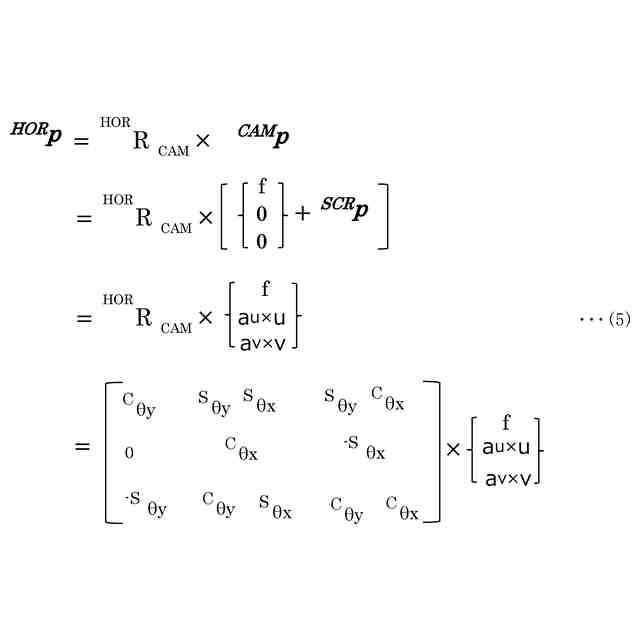
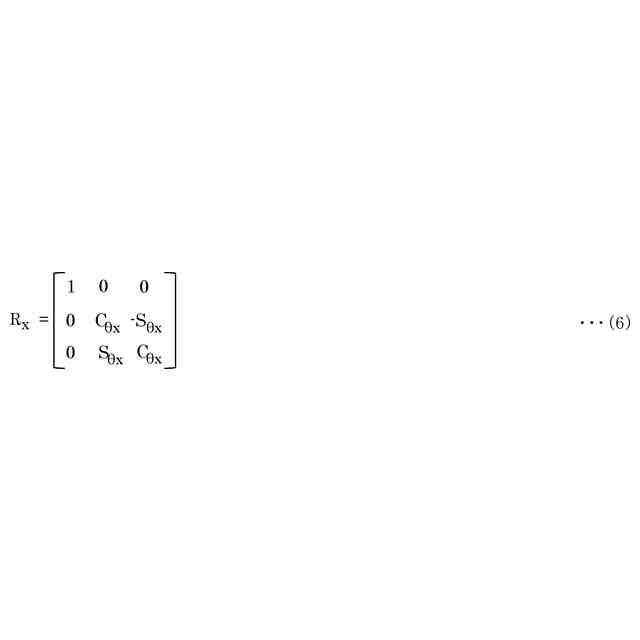
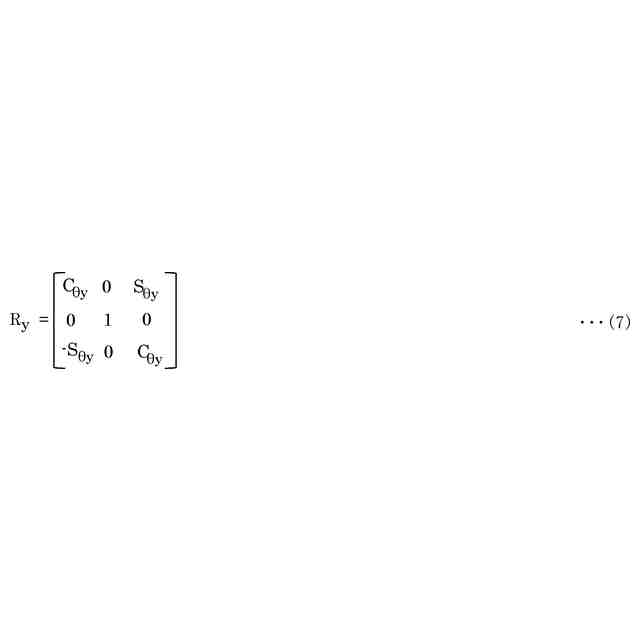
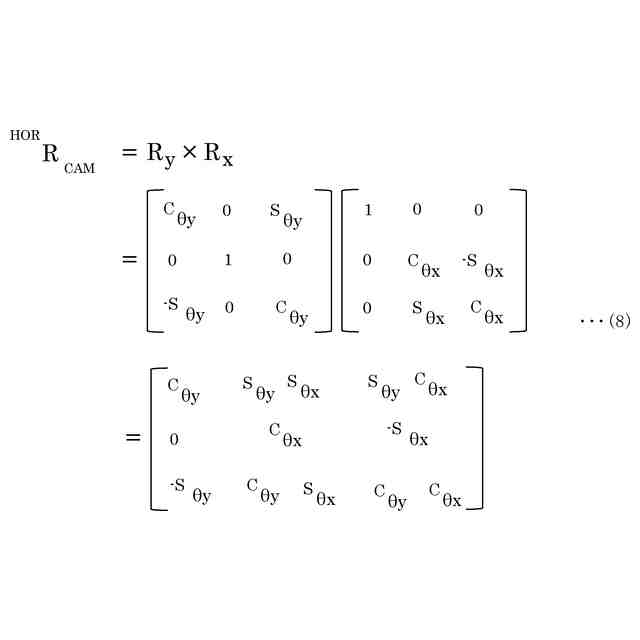
前記撮影画像における前記特徴点の位置を前記画像取得装置の撮影方向を基準とする第1座標系における位置に変換し、
前記第1座標系における前記特徴点の位置を前記水平面に平行な面を基準とする第2座標系における位置に変換し、
前記第2座標系における前記特徴点の位置、前記距離及び前記傾斜角に基づいて、前記所定の船舶の船舶情報を特定する
処理を前記コンピュータに実行させることを特徴とする請求項1に記載の船舶情報測定プログラム。
【請求項5】
船舶情報測定装置が、
所定の船舶を画像取得装置で撮影して前記所定の船舶の撮影画像を取得し、
画像から船舶における特徴点を抽出する機械学習モデルに、取得した前記撮影画像を入力して得られる出力を基に、前記撮影画像における前記所定の船舶の特徴点を抽出し、
前記画像取得装置から前記所定の船舶が位置する水平面までの距離を取得し、
前記画像取得装置の前記水平面に対する傾斜角を取得し、
前記撮影画像における前記特徴点の位置、前記距離及び前記傾斜角に基づいて、前記所定の船舶の船舶情報を特定する
処理を実行することを特徴とする船舶情報測定方法。
【請求項6】
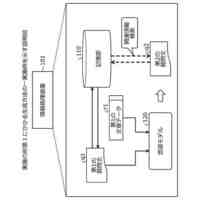
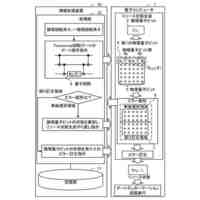
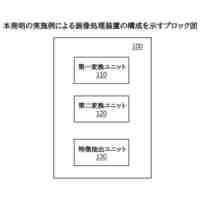
所定の船舶を画像取得装置で撮影して前記所定の船舶の撮影画像を取得する画像取得部と、
画像から船舶における特徴点を抽出する機械学習モデルに、取得した前記撮影画像を入力して得られる出力を基に、前記撮影画像における前記所定の船舶の特徴点を抽出する画像認識部と、
前記画像取得装置から前記所定の船舶が位置する水平面までの距離を取得する距離測定部と、
前記画像取得装置の前記水平面に対する傾斜角を取得する傾斜測定部と、
前記画像認識部により抽出された前記特徴点の前記撮影画像における位置、前記距離測定部により取得された前記距離及び前記傾斜測定部により取得された前記傾斜角に基づいて、前記所定の船舶の船舶情報を特定する算出部と
を備えたことを特徴とする船舶情報測定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、船舶情報測定プログラム、船舶情報測定方法及び船舶情報測定装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
船舶の位置、寸法及び方位は、船舶を表す主要な属性すなわち船舶情報として非常に重要である。これらの情報は、船種等の判断や海上交通における航路選択や衝突防止といった広い応用分野での基礎的な数値として用いられる。
【0003】
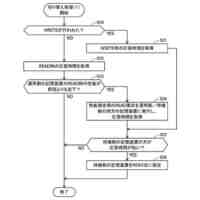
従来、このような船舶を表す主要な属性を得る方法としては、船舶自らその属性を発信するAIS(Automatic Identification System:自動船舶識別装置)を用いることが考えられる。AISは、船舶の識別符号、種類、位置、針路、速力、航行状態及びその他の安全に関する情報を自動的にVHF帯電波で送受信し、船舶局相互間及び船舶局と陸上局の航行援助施設等との間で情報の交換を行うシステムである。AISは、簡便に船舶情報を得る手段として好ましいが、船舶自ら発信することから、発信装置の故障、設定間違い及び設定忘れ等の人為的ミス、並びに、意図的な改ざん及び機器の意図的な切断等により、必ずしも常に正確な情報を得られるわけではないという問題がある。このような場合、以下に示すような直接船舶情報を測定等により得ることが望ましい。
【0004】
船舶のような大型構造物の寸法を非接触で測定する方法として、以下の3つの技術が存在する。1つは、3次元レーザ等の装置を用いて測定する方法である。例えば、3次元レーザスキャナ装置を船舶に沿って移動させながらスキャンして船体表面形状3次元位置情報を取得することで船舶の寸法を測定することが可能となる。他の1つは、画像により寸法を測定する方法である。
【0005】
残りの1つは、セグメンテーションの深層学習を用いる方法である。例えば、測定対象が写った画像のうち寸法測定に使用できる領域を囲んでセグメンテーションとし、セグメンテーションを用いて深層学習を行い、その深層学習の結果を用いることで船舶の寸法を求めることが可能となる。
【0006】
なお、物体の寸法を計測する技術として、穀粒を撮像して取得した撮像画像のうち縦方向及び横方向が最大幅となる箇所を特定して、穀粒の最大幅を算出する技術が存在する。また、物体の形状を検出する技術として、物体の撮像画像を用いてLRF(Local Regression Fitting)学習を実行して、取得した撮像画像から物体の部位点を検出する技術が存在する。
【先行技術文献】
【特許文献】
【0007】
特開2005-83775号公報
特開2012-256131号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、3次元レーザ等の装置を用いて寸法を測定する方法は、設備が高価であり、且つ、測定対象に対して反射ターゲットを設置する等の各種作業が発生するため、容易で且つ正確な測定を実現することは困難である。また、画像を用いて寸法を測定する方法は、画像上の測定対象となる地点をマウス等により入力する作業が人手による作業であり、自動的に測定することは難しく、容易で且つ正確な測定を実現することは困難である。さらに、セグメンテーションの深層学習を用いる方法では、深層学習がセグメンテーションという領域を囲むタスクをベースにしているため、外形に関して大まかな寸法を得ることとなり、船舶の全長や最大幅等の定義通りの寸法を得ることは難しい。また、セグメンテーションの深層学習を用いる方法では、船舶を2次元の情報として処理することから、船舶の方位などの姿勢情報を正しく得ることが困難である。したがって、容易で且つ正確な測定を実現することは困難である。
【0009】
また、穀粒の寸法を算出する技術やLRF学習を用いて物体の部位点を検出する技術をそのまま海洋上の船舶に関する情報取得に用いることは難しく、これらの技術では船舶情報について容易で且つ正確な測定を行うことは困難である。
【0010】
開示の技術は、上記に鑑みてなされたものであって、船舶情報について容易で且つ正確な測定を行う船舶情報測定プログラム、船舶情報測定方法及び船舶情報測定装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
富士通株式会社
ダウンサンプリング
6日前
富士通株式会社
OLT及びPONシステム
26日前
富士通株式会社
光受信装置及び光受信方法
6日前
富士通株式会社
プログラム及びデータ処理装置
20日前
富士通株式会社
情報処理装置及び情報処理方法
12日前
富士通株式会社
情報処理装置および情報処理方法
6日前
富士通株式会社
書き込みアシスト回路及びSRAM
4日前
富士通株式会社
不正検知プログラム、方法、及び装置
12日前
富士通株式会社
受光デバイス及び受光デバイスの製造方法
25日前
富士通株式会社
通知プログラム、通知方法および通知装置
25日前
富士通株式会社
コンパイルプログラムおよびコンパイル方法
20日前
富士通株式会社
半導体装置、半導体装置の製造方法及び電子装置
18日前
富士通株式会社
生成プログラム、生成方法、および情報処理装置
4日前
富士通株式会社
プログラム、情報処理方法およびクラスタシステム
4日前
富士通株式会社
データ処理装置、データ処理方法およびプログラム
1か月前
富士通株式会社
量子計算制御プログラム、および量子計算制御方法
4日前
富士通株式会社
情報処理プログラム、情報処理方法及び情報処理装置
25日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
1か月前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
25日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
12日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
4日前
富士通株式会社
画像処理装置、画像処理方法及びコンピュータプログラム
20日前
富士通株式会社
情報処理プログラム、情報処理方法、および情報処理装置
13日前
富士通株式会社
障害支援プログラム、障害支援方法および障害支援システム
27日前
富士通株式会社
性能情報収集プログラム、性能情報収集方法、及び情報処理装置
18日前
富士通株式会社
量子計算支援プログラム、量子計算支援方法、および情報処理装置
12日前
富士通株式会社
量子計算制御プログラム、量子計算制御方法、および情報処理装置
12日前
富士通株式会社
量子計算制御プログラム、量子計算制御方法、および情報処理装置
12日前
富士通株式会社
量子計算支援プログラム、量子計算支援方法、および情報処理装置
25日前
富士通株式会社
量子化学計算プログラム、量子化学計算方法、および情報処理装置
4日前
富士通株式会社
船舶情報測定プログラム、船舶情報測定方法及び船舶情報測定装置
28日前
富士通株式会社
疑似乱数生成装置、疑似乱数生成プログラム、及び疑似乱数生成方法
12日前
富士通株式会社
スケジューリングプログラム,情報処理装置およびスケジューリング方法
25日前
富士通株式会社
スケジューリングプログラム,情報処理装置およびスケジューリング方法
25日前
富士通株式会社
予測プログラム、訓練プログラム、予測方法、訓練方法および情報処理装置
26日前
富士通株式会社
オンライン予測モデルによる使用のためにエンコーダニューラルネットワークを訓練する、コンピュータにより実施される方法、データ処理装置、及びコンピュータプログラム
20日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ