TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025164413
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068384
出願日
2024-04-19
発明の名称
無人搬送システム
出願人
愛三工業株式会社
代理人
弁理士法人コスモス国際特許商標事務所
主分類
G05D
1/656 20240101AFI20251023BHJP(制御;調整)
要約
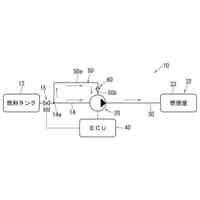
【課題】システム構成の簡素化を図りつつ、荷下ろし場所や荷積み場所が荷物搬送車の経路上でない場合(例えば、床より上に設置される棚が荷下ろし場所や荷積み場所である場合)でも、荷物搬送車に適切な運転指示を与えることができる無人搬送システムを提供すること。
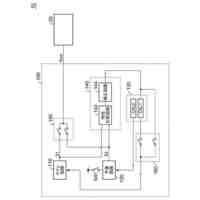
【解決手段】本開示の一態様は、無人搬送システム1において、設定された経路に従って搬送され、経路の前方の障害物を検出する障害物センサ21を搭載するAMR11と、AMR11の経路の前方に設置され、荷物の有無に連動してAMR11の経路の前方に掲出されるセンサ感知棒31を備える完成品シュート12Aおよび/または空箱シュート12Bと、障害物センサ21によるセンサ感知棒31の検出結果に基づいて、AMR11に運転指示を行う制御装置13と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
設定された経路に従って搬送され、前記経路の前方の障害物を検出する障害物センサを搭載する荷物搬送車と、
前記荷物搬送車の前記経路の前方に設置され、荷物の有無に連動して前記荷物搬送車の前記経路の前方に掲出される立体的な表示部を備える荷下ろし場所および/または荷積み場所と、
前記障害物センサによる前記表示部の検出結果に基づいて、前記荷物搬送車に運転指示を行う制御装置と、を有すること、
を特徴とする無人搬送システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、無人搬送システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、障害物センサを搭載する荷物搬送車を備える無人搬送システムにおいて、荷下ろし場所に既に荷物が置いてある場合に、既に置いてある荷物を障害物センサで検出し、検出結果に基づき荷物搬送車に運転指示を与えること、が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平11-180696号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の無人搬送システムにおいては、荷下ろし場所が荷物搬送車の経路上でない場合(例えば、床より上に設置される棚が荷下ろし場所である場合)に、荷物搬送車の障害物センサにより荷物の有無が検出できないので、荷物搬送車に適切な運転指示を与えることができない。
【0005】
そこで、本開示は上記した課題を解決するためになされたものであり、システム構成の簡素化を図りつつ、荷積み場所や荷下ろし場所が荷物搬送車の経路上でない場合(例えば、床より上に設置される棚が荷下ろし場所や荷積み場所である場合)でも、荷物搬送車に適切な運転指示を与えることができる無人搬送システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するためになされた本開示の一形態は、無人搬送システムにおいて、設定された経路に従って搬送され、前記経路の前方の障害物を検出する障害物センサを搭載する荷物搬送車と、前記荷物搬送車の前記経路の前方に設置され、荷物の有無に連動して前記荷物搬送車の前記経路の前方に掲出される立体的な表示部を備える荷下ろし場所および/または荷積み場所と、前記障害物センサによる前記表示部の検出結果に基づいて、前記荷物搬送車に運転指示を行う制御装置と、を有すること、を特徴とする。
【0007】
この態様によれば、荷下ろし場所や荷積み場所が荷物搬送車の経路の前方の位置に設置される場合に、荷物搬送車に本来備えられる障害物センサを用いて荷物搬送車に荷下ろしや荷積みの運転指示が行えるため、システム構成が簡素化できる、また、コストを低減できる。
【0008】
また、荷下ろし場所や荷積み場所が搬送車の経路上でない場合(例えば床より上に設置される棚が荷下ろし場所や荷積み場所である場合)でも、荷物搬送車の障害物センサを用いて荷物の有無が検出でき、荷物搬送車に適切な運転指示を与えることができる。
【発明の効果】
【0009】
本開示の無人搬送システムによれば、システム構成の簡素化を図りつつ、荷下ろし場所や荷積み場所が荷物搬送車の経路上でない場合(例えば、床より上に設置される棚が荷下ろし場所や荷積み場所である場合)でも、荷物搬送車に適切な運転指示を与えることができる。
【図面の簡単な説明】
【0010】
本実施形態の(完成品シュートを有する)無人搬送システムの構成図である。
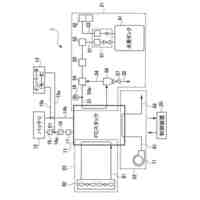
本実施形態の(空箱シュートを有する)無人搬送システムの構成図である。
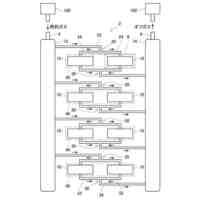
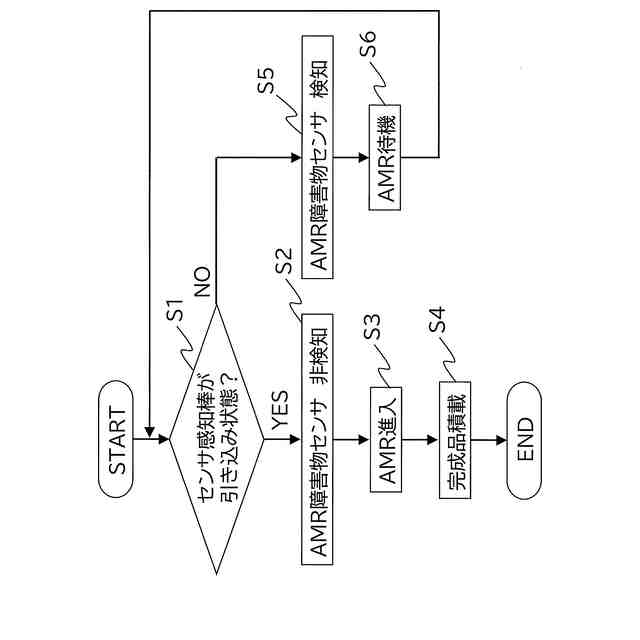
荷下ろし作業に関するフローチャート図である。
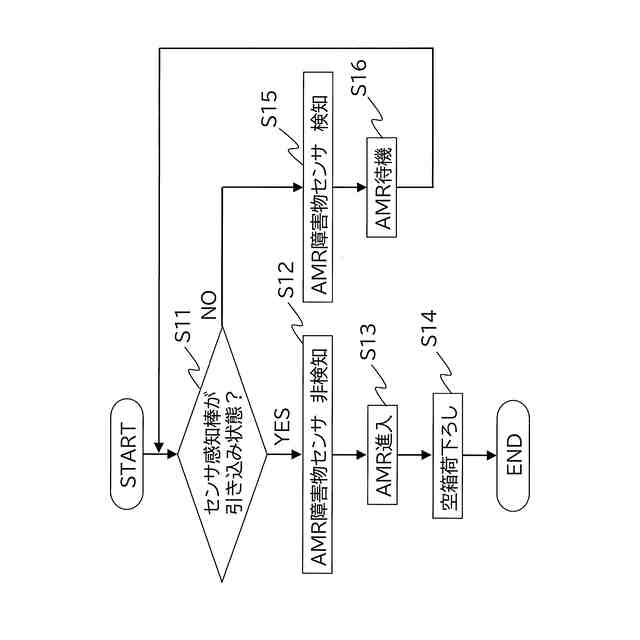
荷積み作業に関するフローチャート図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
愛三工業株式会社
集電体
16日前
愛三工業株式会社
消火剤
8日前
愛三工業株式会社
マスク
1か月前
愛三工業株式会社
冷却器
16日前
愛三工業株式会社
吸着装置
16日前
愛三工業株式会社
樹脂部材
1か月前
愛三工業株式会社
食品容器
29日前
愛三工業株式会社
燃料ポンプ
1日前
愛三工業株式会社
水素分離膜
8日前
愛三工業株式会社
電極構造体
1か月前
愛三工業株式会社
液体ポンプ
1日前
愛三工業株式会社
ガス吸着装置
1か月前
愛三工業株式会社
燃料供給装置
1か月前
愛三工業株式会社
インシュレータ
16日前
愛三工業株式会社
無人搬送システム
1か月前
愛三工業株式会社
燃料電池システム
1か月前
愛三工業株式会社
燃料電池システム
8日前
愛三工業株式会社
射出成形機用金型
3日前
愛三工業株式会社
金型のガス抜き構造
9日前
愛三工業株式会社
水素エンジンシステム
29日前
愛三工業株式会社
ガス燃料用レギュレータ
16日前
愛三工業株式会社
飛行体用気体供給システム
8日前
愛三工業株式会社
ハイブリッド車両の制御装置
1か月前
愛三工業株式会社
吸着体及びこれを用いた吸着装置
1か月前
愛三工業株式会社
アクチュエータ、バルブ及びサーモスイッチ
1か月前
愛三工業株式会社
集電体、集電体を製造するための中間体及び集電体の製造方法
1日前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
ローム株式会社
基準電圧源
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
株式会社クボタ
作業車
1か月前
新電元工業株式会社
作業用ロボット
1か月前
株式会社クボタ
作業車
8日前
豊田合成株式会社
機器制御装置
2か月前
ローム株式会社
半導体集積回路
9日前
株式会社ダイフク
搬送設備
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ