TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025163449
公報種別
公開特許公報(A)
公開日
2025-10-29
出願番号
2024066712
出願日
2024-04-17
発明の名称
運転支援装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人プロスペック特許事務所
主分類
B60W
50/14 20200101AFI20251022BHJP(車両一般)
要約
【目的】 渋滞が解消された時点での自車両の車速の上限値が、当該渋滞が発生する前に設定された上限値よりも高くなっていることを運転者が容易に認識することができる運転支援装置を提供する。
【解決手段】 運転支援装置1は、自車両の車速sp0の上限値spmaxを上昇させることを要求する操作、及び自車両を発進させることを要求する操作に共用される操作装置を備える。運転支援装置1のプロセッサは、自車両の周辺に渋滞が生じる以前の前記上限値に比べ、当該渋滞が解消された時点の前記上限値が高くなっている場合に、前記上限値が上昇したことを表す情報が運転者に提供されるように報知装置50を制御する。
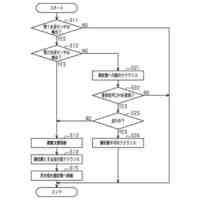
【選択図】 図2
特許請求の範囲
【請求項1】
自車両の挙動に関する情報、及び、自車両の直前を走行している先行車両の挙動に関する情報を取得するための車載センサと、
自車両の車速が所定の上限値にて走行するように自車両を制御する処理、及び、自車両が前記先行車両に追従するように自車両を制御する処理を実行可能なプロセッサであって、自車両及び前記先行車両が停車している状態から前記先行車両が発進したことを検知し、且つ、自車両の運転者が所定の操作を実行したことを検知した場合に、自車両が前記先行車両に追従して発進するように自車両を制御するように構成されたプロセッサと、
を備えた運転支援装置であって、
前記上限値を上昇させることを要求する操作、及び自車両を発進させることを要求する操作に共用される操作装置を備え、
前記プロセッサは、自車両の周辺に渋滞が生じる以前の前記上限値に比べ、当該渋滞が解消された時点の前記上限値が高くなっている場合に、前記上限値が上昇したことを表す情報が運転者に提供されるように報知装置を制御する、ように構成された、運転支援装置。
続きを表示(約 860 文字)
【請求項2】
請求項1に記載の運転支援装置において、
前記プロセッサは、自車両の周辺に渋滞が生じたと判定したタイミングで前記上限値を記憶装置に記憶させ、その後に、当該渋滞が解消されたと判定したタイミングにて、前記上限値の現在値が前記記憶装置に記憶されている値よりも大きい場合に、前記報知処理を実行する、ように構成された、運転支援装置。
【請求項3】
請求項2に記載の運転支援装置において、
前記報知処理は、前記上限値の現在値を、前記記憶装置に記憶されている値に戻すことを要求する復元操作を実行するために用いられる情報を運転者に提供する処理を含み、
前記プロセッサは、運転者が前記復元操作を実行したことを検知した場合に、前記上限値を前記記憶装置に記憶されている値に戻す、ように構成された、運転支援装置。
【請求項4】
請求項1に記載の運転支援装置において、
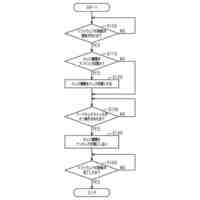
前記プロセッサは、自車両の車速が所定の第一車速以下である状態の継続時間の長さが第一渋滞判定閾値を超えた場合に、自車両の周辺に渋滞が生じたと判定し、自車両の車速が前記第一車速よりも高速の第二車速を超えている状態の継続時間の長さが第二渋滞判定閾値を超えた場合に、前記渋滞が解消されたと判定する、ように構成された、運転支援装置。
【請求項5】
請求項1乃至請求項4のうちのいずれか1つに記載の運転支援装置において、
前記プロセッサは、自車両の車速が「0」より大きい状況又は自車両の車速が「0」である状態の継続時間の長さが停止判定閾値以下である状況下で前記操作装置が操作された場合に、前記上限値を上昇させることを要求する操作が実行されたと判定し、自車両の車速が「0」である状態の継続時間の長さが前記停止判定閾値を超えている状況下で前記操作装置が操作された場合に、自車両を前記先行車両に追従して発進させることを要求する操作が実行されたと判定する、ように構成された運転支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自車両の車速を調整する運転操作を支援する機能を備えた運転支援装置に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
自車両の車速を調整する運転操作を支援する機能を備えた運転支援装置が提案されている(例えば、下記特許文献1を参照。)。この運転支援装置(以下、「従来装置」と称呼する。)は、自車両が高速道路を走行している状況下で、自車両の車速が所定の上限値(運転者によって予め設定された値)に一致するように、自車両の駆動装置、制動装置など(以下、「駆動装置等」と称呼する。)を制御する(定速走行機能)。ただし、先行車両(自車両の直前を走行している他車両)の車速が当該上限値(設定車速)より低速である場合には、従来装置は、自車両と先行車両との車間距離が所定値より大きくなるように駆動装置等を制御する(車間距離調整機能)。従来装置は、先行車両が停止したことを検知した場合、自車両を当該先行車両の後方にて停止させる。その後、従来装置は、先行車両が発進したことを検知し、且つ、所定の操作装置(スイッチ)が操作されたことを検知した場合に、自車両が先行車両に追従して発進するように駆動装置等を制御する。
【先行技術文献】
【特許文献】
【0003】
特開平11-20495号公報
【発明の概要】
【0004】
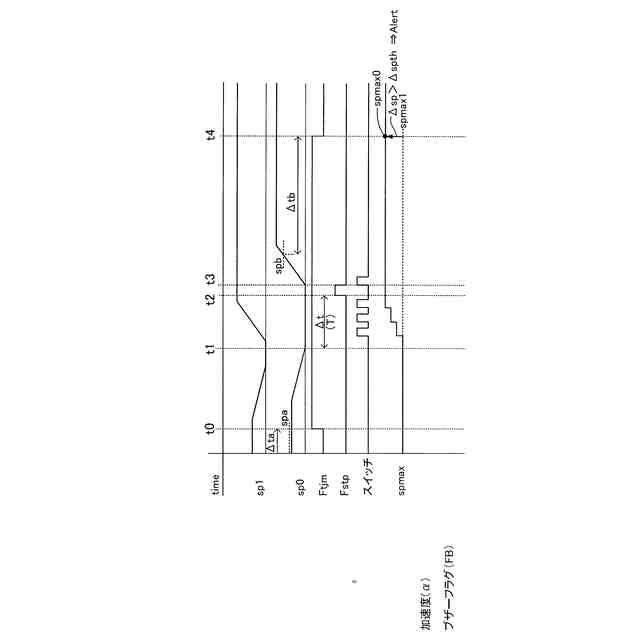
この種の運転支援装置において、前記上限値を上昇させることを要求する操作に用いられるスイッチと、発進した先行車両に追従するように自車両を発進させることを要求する操作に用いられるスイッチとが個別に設けられるのではなく、両操作のための単一のスイッチが設けられる場合がある。この場合、運転支援装置は、自車両が停止していると判定した状態で当該スイッチが操作されたことを検知した場合に、自車両を発進させる。一方、運転支援装置は、自車両が走行していると判定した状態(自車両が停止していると判定していない状態)で当該スイッチが操作されたことを検知した場合、前記上限値を上昇させる。ここで、自車両の車速が「0km/h」である状態が継続した時間Δtが閾値Δtthを超えた時点で自車両が停止したと判定するように運転支援装置が構成される場合がある。
【0005】
ところで、例えば、高速道路において渋滞が生じているために一時的に先行車両が停止し、その後方にて自車両が停止した直後に、当該先行車両が発進するシーンが想定される。このシーンにおいて、当該先行車両に追従するように自車両を発進させるために運転者がスイッチを操作した時点では、時間Δtが閾値Δtth以下である場合がある。そのため、運転者がスイッチを操作した時点では、運転支援装置は、自車両が停止したと判定していない。すなわち、運転支援装置は、自車両が未だ走行中であると判定する。よって、運転支援装置は、当該スイッチの操作に応答して、自車両を発進させるのではなく、自車両の車速の上限値を上昇させる。運転者は上限値が上昇していることに気付かず、自車両を発進させるために、同スイッチの操作を繰り返す可能性が高い。例えば、運転支援装置は、時間Δtが閾値Δtth以下である期間内に同スイッチが操作されるごとに、前記上限値を所定値だけ上昇させる。そして、運転支援装置は、時間Δtが閾値Δtthを超えた後に同スイッチが操作されたことを検知した時点で、自車両を発進させる。このように、従来装置が適用された車両において、渋滞が発生している期間内に、運転者が意図せず、自車両の車速の上限値を上昇させてしまい、渋滞が解消された後に、運転者の意図していた車速よりも高速で自車両が走行する虞がある。
【0006】
本発明の目的の一つは、渋滞が解消された時点での自車両の車速の上限値が、当該渋滞が発生する前に設定された上限値よりも高くなっていることを運転者が容易に認識することができる運転支援装置を提供することである。
【0007】
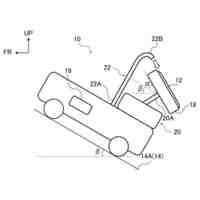
上記の目的を達成するために、本発明の運転支援装置(1)は、
自車両(V0)の挙動(sp0)に関する情報、及び、自車両の直前を走行している先行車両(V1)の挙動(sp1、D)に関する情報を取得するための車載センサ(20)と、
自車両の車速が所定の上限値(spmax)にて走行するように自車両を制御する処理、及び、自車両が前記先行車両に追従するように自車両を制御する処理を実行可能なプロセッサであって、自車両及び前記先行車両が停止している状態から前記先行車両が発進したことを検知し、且つ、自車両の運転者が所定の操作を実行したことを検知した場合に、自車両が前記先行車両に追従して発進するように自車両を制御するように構成されたプロセッサ(10)と、
を備える。
また、当該運転支援装置は、前記上限値を上昇させることを要求する操作、及び自車両を発進させることを要求する操作に共用される操作装置(25)を備える。
前記プロセッサは、自車両の周辺に渋滞が生じる以前の前記上限値に比べ、当該渋滞が解消された時点の前記上限値が高くなっている場合に、前記上限値が上昇したことを表す情報が運転者に提供されるように報知装置(50)を制御する報知処理を実行する。
【0008】
本発明に係る運転支援装置によれば、渋滞中に運転者が自車両の車速の上限値を意図せず上昇させてしまったとしても、当該渋滞が解消された時点で、当該上限値の上昇を表す情報が運転者に提供される。よって、運転者は、当該上限値の上昇を容易に認識できる。
【0009】
本発明の一態様に係る運転支援装置において、
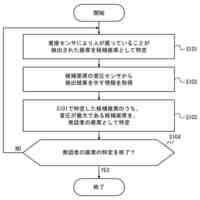
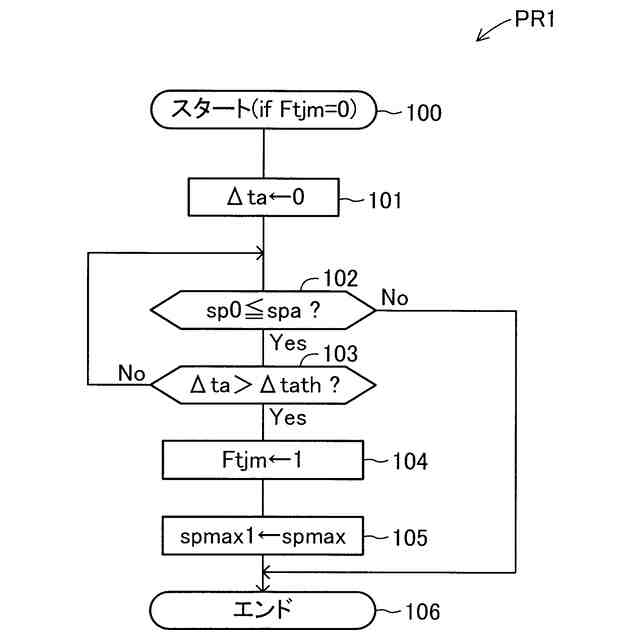
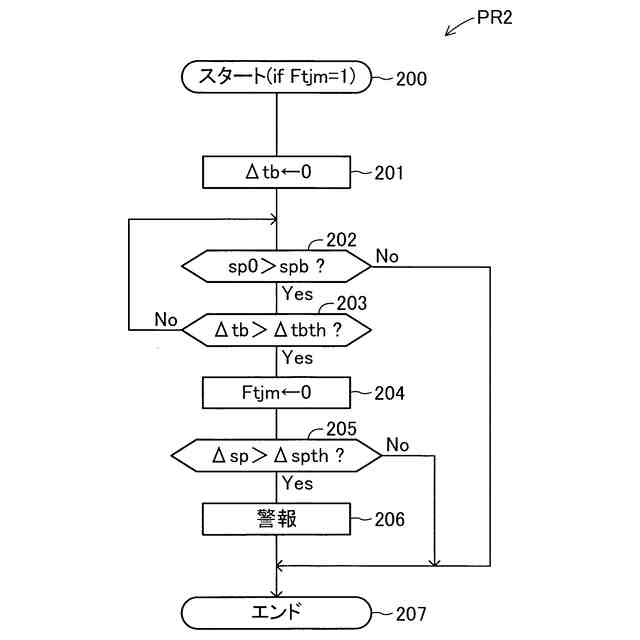
前記プロセッサは、自車両の周辺に渋滞が生じたと判定したタイミングで前記上限値を記憶装置(10c)に記憶させ、その後に、当該渋滞が解消されたと判定したタイミングにて、前記上限値の現在値(spmax0)が前記記憶装置に記憶されている値(spmax1)よりも高い場合に、前記報知処理を実行する。
【0010】
これによれば、プロセッサは、渋滞が解消された時点での車速の上限値が、当該渋滞が生じる以前に比べて高くなっていることを比較的簡単に検知できる。なお、プロセッサは、前記渋滞が解消されたと判定したタイミングにて、前記上限値の現在値と前記記憶装置に記憶されている値との差分(Δsp)が閾値(Δspth)を超えている場合に、前記報知処理を実行してもよい。これによれば、上限値が比較的大きく上昇した場合にのみ、当該上限値の上昇を表す情報が運転者に提供される。すなわち、上限値の変化が僅かである場合(その後の自車両の走行に支障がない場合)には、当該情報の提供が抑制される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
方法
11日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
車体
12日前
トヨタ自動車株式会社
治具
4日前
トヨタ自動車株式会社
車両
11日前
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
車両
10日前
トヨタ自動車株式会社
方法
10日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
方法
19日前
トヨタ自動車株式会社
方法
19日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
椅子
19日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
電池
9日前
トヨタ自動車株式会社
方法
9日前
トヨタ自動車株式会社
車両
23日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
飛行体
16日前
トヨタ自動車株式会社
電動機
9日前
トヨタ自動車株式会社
自動車
10日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
サーバ
6日前
トヨタ自動車株式会社
正極層
9日前
トヨタ自動車株式会社
モータ
11日前
トヨタ自動車株式会社
電動車
19日前
トヨタ自動車株式会社
加熱器
23日前
トヨタ自動車株式会社
電磁弁
19日前
トヨタ自動車株式会社
モータ
17日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
車載装置
23日前
トヨタ自動車株式会社
通知装置
9日前
トヨタ自動車株式会社
蓄電セル
9日前
トヨタ自動車株式会社
蓄電装置
9日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ