TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025160427
公報種別
公開特許公報(A)
公開日
2025-10-22
出願番号
2025129012,2023564659
出願日
2025-07-31,2022-04-28
発明の名称
多関節型手術用装置
出願人
リブスメド インコーポレーテッド
代理人
SK弁理士法人
,
個人
,
個人
主分類
A61B
34/30 20160101AFI20251015BHJP(医学または獣医学;衛生学)
要約
【課題】腹腔鏡手術または様々な手術に使用するためにロボットアームに取り付けられるか、または手動で作動可能な多関節型手術用装置を提供する。
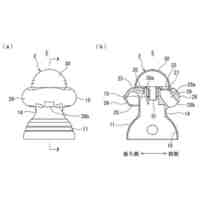
【解決手段】エンドツールのピッチ回転を制御する駆動部を含み、前記駆動部は、ワイヤの少なくとも一部が巻かれるように形成される駆動部ピッチ仲介プーリと、前記駆動部ピッチ仲介プーリに対して一定距離離隔した状態で前記駆動部ピッチ仲介プーリに対して相対的に移動することにより、前記駆動部ピッチ仲介プーリに対する位置が変わり、前記ワイヤの少なくとも一部が巻かれるように形成される駆動部ピッチ衛星プーリとを含み、前記駆動部ピッチ衛星プーリが前記駆動部ピッチ仲介プーリに対して相対的に移動すると、前記駆動部内の前記ワイヤの全長が変更されることで、前記エンドツールのピッチ回転を制御することを特徴とする、多関節型手術用装置。
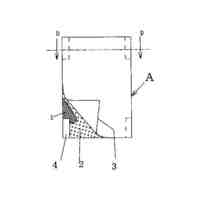
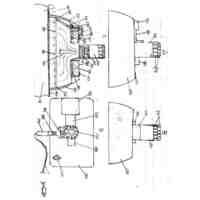
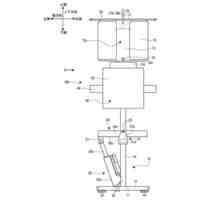
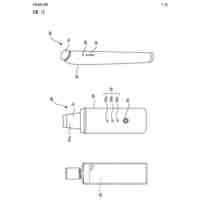
【選択図】図4
特許請求の範囲
【請求項1】
エンドツール(end tool)のピッチ回転を制御する駆動部を含み、
前記駆動部は、
ワイヤの少なくとも一部が巻かれるように形成される駆動部ピッチ仲介プーリと、
前記駆動部ピッチ仲介プーリに対して一定距離離隔した状態で前記駆動部ピッチ仲介プーリに対して相対的に移動することにより、前記駆動部ピッチ仲介プーリに対する位置が変わり、前記ワイヤの少なくとも一部が巻かれるように形成される駆動部ピッチ衛星プーリとを含み、
前記駆動部ピッチ衛星プーリが前記駆動部ピッチ仲介プーリに対して相対的に移動すると、前記駆動部内の前記ワイヤの全長が変更されることで、前記エンドツールのピッチ回転を制御することを特徴とする、多関節型手術用装置。
続きを表示(約 1,600 文字)
【請求項2】
前記駆動部ピッチ衛星プーリが前記駆動部ピッチ仲介プーリに対して相対的に移動すると、前記駆動部ピッチ仲介プーリに巻かれる前記ワイヤの経路長が変化されることで、前記駆動部内の前記ワイヤの全長が変更されることを特徴とする、請求項1に記載の多関節型手術用装置。
【請求項3】
駆動部ピッチ回転軸を中心に回転可能に形成される駆動部ピッチプーリをさらに含み、
前記駆動部ピッチ衛星プーリは、前記駆動部ピッチプーリに対して相対的に移動可能に形成され、
前記駆動部ピッチプーリが回転すると、前記駆動部ピッチ回転軸に対する前記駆動部ピッチ衛星プーリの相対位置が変化するように形成される、請求項1に記載の多関節型手術用装置。
【請求項4】
前記駆動部ピッチ回転軸を中心に前記駆動部ピッチプーリと共に回転する駆動部ピッチコネクタをさらに含み、
前記駆動部ピッチ衛星プーリは、前記駆動部ピッチコネクタの一端部に係合される、請求項3に記載の多関節型手術用装置。
【請求項5】
前記駆動部ピッチプーリは、前記駆動部ピッチ回転軸を中心に自転(rotation)可能に形成され、
前記駆動部ピッチ衛星プーリは、前記駆動部ピッチ回転軸を中心に公転(revolution)可能に形成される、請求項3に記載の多関節型手術用装置。
【請求項6】
前記ワイヤは、前記駆動部ピッチ仲介プーリを通過して前記エンドツールに延びる第1ワイヤと第2ワイヤとを含み、
前記駆動部ピッチ回転軸が回転すると、前記第1ワイヤと前記第2ワイヤは同じ方向に移動する、請求項3に記載の多関節型手術用装置。
【請求項7】
前記駆動部は、前記エンドツールのヨー回転をさらに制御し、
前記駆動部は、
前記ワイヤの少なくとも一部が巻かれるように形成される駆動部ヨー仲介プーリと、
前記駆動部ヨー仲介プーリに対して一定距離離隔した状態で前記駆動部ヨー仲介プーリに対して相対的に移動することにより、前記駆動部ヨー仲介プーリに対する位置が変わり、前記ワイヤの少なくとも一部が巻かれるように形成される駆動部ヨー衛星プーリとを含み、
前記駆動部ヨー衛星プーリが前記駆動部ヨー仲介プーリに対して相対的に移動すると、前記駆動部内の前記ワイヤの全長が変更されることで、前記エンドツールのヨー回転を制御する、請求項3に記載の多関節型手術用装置。
【請求項8】
前記駆動部ピッチ回転軸とは異なる駆動部ヨー回転軸をさらに含み、
前記駆動部ヨー衛星プーリは、前記駆動部ヨー回転軸に対して相対的に移動可能に形成され、
前記駆動部ヨー回転軸が回転すると、前記駆動部ヨー回転軸に対する前記駆動部ヨー衛星プーリの相対位置が変化するように形成される、請求項7に記載の多関節型手術用装置。
【請求項9】
前記駆動部ヨー衛星プーリは、
前記ワイヤのうちの第1ワイヤの少なくとも一部が巻かれるように形成される駆動部第1ヨー衛星プーリと、
前記ワイヤのうち第2ワイヤの少なくとも一部が巻かれるように形成される駆動部第2ヨー衛星プーリとを含む、請求項8に記載の多関節型手術用装置。
【請求項10】
前記駆動部は、
前記駆動部ヨー回転軸と共に回転するように形成される駆動部ヨー第1コネクタと駆動部ヨー第2コネクタとをさらに含み、
前記駆動部第1ヨー衛星プーリは、前記駆動部ヨー第1コネクタの一端部に係合され、前記駆動部第2ヨー衛星プーリは、前記駆動部ヨー第2コネクタの一端部に係合され、
前記駆動部ヨー回転軸が回転すると、前記駆動部第1ヨー衛星プーリと前記駆動部第2ヨー衛星プーリとが、前記駆動部ヨー回転軸を中心に共に回転する、請求項9に記載の多関節型手術用装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、多関節型手術用装置に関するものであり、詳細には、腹腔鏡手術または様々な手術に使用するためにロボットアームに取り付けられるか、または手動で作動可能な多関節型手術用装置に関するものである。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
医学的に手術とは、皮膚や粘膜、その他の組織を医療機器を使用して切断したり、切開したり、操作を加えて病気を治すことをいう。特に、手術部位の皮膚を切開して開き、その内部にある器官などを治療、成形または除去する開腹手術などは、出血、副作用、患者の痛み、傷跡などの問題を引き起こす。したがって、最近は皮膚に所定の孔を形成して医療機器、例えば腹腔鏡、手術用インストルメント、微細手術用顕微鏡などのみを挿入して行う手術またはロボット(robot)を使用した手術が代替として脚光を浴びている。
【0003】
ここで手術ロボットとは、外科医によって施行されていた手術行為に代わる機能を有するロボットをいう。このような手術ロボットは、人に比べて正確で精密な動作をすることができ、遠隔手術が可能であるという利点を有する。
【0004】
現在、世界中で開発されている手術ロボットには、骨手術ロボット、腹腔鏡手術ロボット、定位手術ロボットなどがある。ここで腹腔鏡手術ロボットは、腹腔鏡と小型手術ツールを用いて最小侵襲的手術を施行するロボットである。
【0005】
腹腔鏡手術は、腹部に一つ以上の小さな穴を開け、腹部の中を覗くための内視鏡である腹腔鏡を入れた後に手術する先端の手術技術として、今後大きな発展が期待される分野である。最近の腹腔鏡は、コンピュータチップが取り付けられ、肉眼で見るよりも鮮明で拡大された映像を得ることができ、また、モニタを通じて画面を見ながら特別に設計された腹腔鏡用手術器具を使用すればどんな手術もできるほど発展が進んでいる。
【0006】
さらに、腹腔鏡手術はその手術範囲が開腹手術とほぼ同じでありながらも、開腹手術に比べ合併症が少なく、施術後はるかに早い時間内に治療を開始することができ、手術患者の体力や免疫機能を維持させる能力に優れているというメリットがある。このため、米国やヨーロッパなどでは、大腸がん治療などにおいては腹腔鏡手術が徐々に標準手術として認識されていく傾向にある。
【0007】
一方、手術用ロボットは、一般にマスターロボットとスレーブロボットとから構成される。手術者がマスターロボットに備えられた操縦レバー(例えば、ハンドル)を操作すると、スレーブロボットのロボットアームに結合されるか、ロボットアームが把持している手術ツールが操作されて手術が行われる。
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、腹腔鏡手術または様々な手術に使用するためにロボットアームに取り付けられるか、または手動で作動可能な多関節型手術用装置において、ピッチ動作時に発生するジョーワイヤの動きを補償してピッチ動作とヨー動作/アクチュエーション動作が独立して円滑に行われる多関節型手術用装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
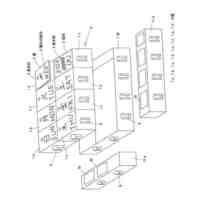
本発明の一実施形態は、1つ以上のジョー(jaw)及び前記ジョーと結合し、第1軸を中心に前記ジョーと共に回転可能に形成されるエンドツールジョープーリを含み、少なくともピッチ回転及びヨー回転が可能であるように形成されるエンドツール(end tool)と、前記エンドツールジョープーリに結合されて前記エンドツールジョープーリの回転に応じて移動するジョーワイヤと、一方向に延びて形成され、内部に前記ジョーワイヤが通過し、一端部に前記エンドツールが結合される接続部と、前記接続部の他端部に結合され、前記エンドツールの前記ピッチ回転及び前記ヨー回転を制御する駆動部と、を含み、前記駆動部は、第2軸を中心に回転可能に形成され、前記ジョーワイヤと結合される駆動部ジョー(jaw)プーリと、前記駆動部ジョープーリに隣接して形成され、位置が固定された軸を中心に自転(rotation)可能に形成され、前記ジョーワイヤの少なくとも一部が巻き付けられるように形成される駆動部仲介プーリと、前記駆動部仲介プーリに隣接して形成され、前記駆動部仲介プーリに対して相対的に移動可能で前記駆動部仲介プーリに対する位置が変化できるように形成され、前記ジョーワイヤの少なくとも一部が巻き付けられるように形成される駆動部衛星プーリと、を含み、前記駆動部ジョープーリの回転によって前記ジョーワイヤが移動することで前記エンドツールジョープーリ及び前記ジョーが回転され、前記駆動部ジョープーリに巻き出される2本の前記ジョーワイヤは、前記駆動部仲介プーリ、前記駆動部衛星プーリ、及び前記駆動部仲介プーリに順次巻き付けられた後に前記エンドツール側に延び、前記駆動部衛星プーリが前記駆動部仲介プーリに対して相対的に移動すると、前記駆動部内の前記ジョーワイヤの全長が変更されることで、前記エンドツールが前記ピッチ回転することを特徴とする、多関節型手術用装置を提供する。
【発明の効果】
【0010】
このような本発明により、ピッチ動作時に発生するジョーワイヤの動きを補償してピッチ動作とヨー動作/アクチュエーション動作が独立して円滑に行われる効果を得ることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
貼付剤
9日前
個人
健康器具
8か月前
個人
鼾防止用具
8か月前
個人
短下肢装具
3か月前
個人
嚥下鍛錬装置
4か月前
個人
洗井間専家。
7か月前
個人
脈波測定方法
8か月前
個人
前腕誘導装置
3か月前
個人
脈波測定方法
8か月前
個人
排尿補助器具
22日前
個人
白内障治療法
7か月前
個人
ウォート指圧法
20日前
個人
汚れ防止シート
1か月前
個人
ホバーアイロン
7か月前
個人
バッグ式オムツ
4か月前
個人
アイマスク装置
2か月前
個人
腰ベルト
12日前
個人
歯の修復用材料
4か月前
個人
矯正椅子
5か月前
個人
胸骨圧迫補助具
2か月前
個人
哺乳瓶冷まし容器
3か月前
個人
湿布連続貼り機。
2か月前
個人
車椅子持ち上げ器
7か月前
個人
口内洗浄具
8か月前
個人
陣痛緩和具
4か月前
三生医薬株式会社
錠剤
7か月前
個人
シャンプー
6か月前
個人
歯の保護用シール
5か月前
個人
美容セット
今日
個人
服薬支援装置
7か月前
株式会社大野
骨壷
4か月前
株式会社結心
手袋
8か月前
個人
性行為補助具
3か月前
株式会社八光
剥離吸引管
5か月前
株式会社コーセー
化粧料
19日前
個人
治療用酸化防御装置
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ