TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152721
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024054755
出願日
2024-03-28
発明の名称
車両の合流位置評価方法並びに合流位置評価のためのモデル生成方法及び装置
出願人
マツダ株式会社
代理人
弁理士法人三協国際特許事務所
主分類
G08G
1/16 20060101AFI20251002BHJP(信号)
要約
【課題】合流位置を比較的軽い負荷で精度よく評価する。
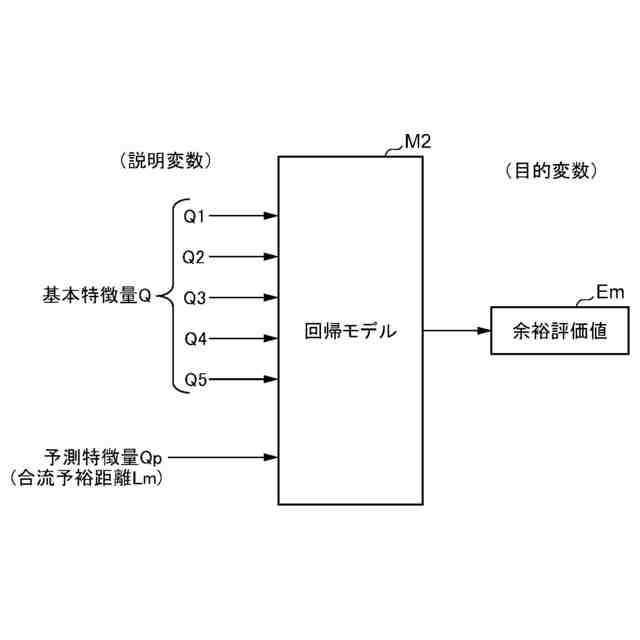
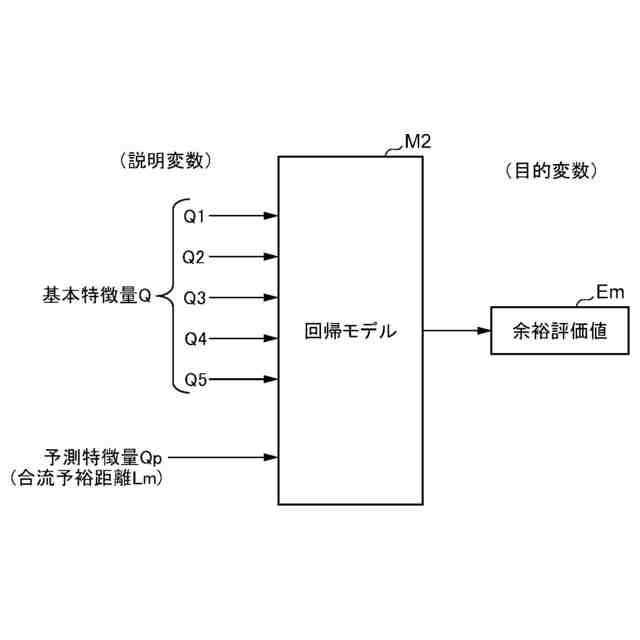
【解決手段】合流位置評価方法は、種々の初期条件を出発点にその後の自車両及び他車群の挙動をシミュレーションするステップと、当該シミュレーションの結果に基づいて、自車両が他車群のギャップに割り込む合流動作の成否に関する評価値(Em)をギャップごとに算出するステップと、算出した評価値(Em)とこれに対応する初期条件とを含むデータセットの集合に基づいて回帰モデル(M2)を生成するステップと、ギャップごとに所定の特徴量を取得し、取得した当該特徴量を説明変数として回帰モデル(M2)に入力することにより、各ギャップの評価値(Em)を同定するステップと、を含む。特徴量は、合流開始時の状態から取得される基本特徴量(Q)と、合流開始時の状態に基づいて予測された将来の状態から取得される予測特徴量(Qp)と、を含む。
【選択図】図5
特許請求の範囲
【請求項1】
他車群が走行する本線に自車両が支線から合流するときの合流位置を評価する方法であって、
前記自車両及び前記他車群の挙動を予測する運転挙動モデルを用いて、交通環境が異なる種々の初期条件を出発点に、その後の前記自車両及び前記他車群の挙動をシミュレーションするシミュレーションステップと、
前記シミュレーションの結果に基づいて、前記自車両が前記他車群のギャップに割り込む合流動作の成否に関する評価値を前記ギャップごとに算出する評価値算出ステップと、
算出した前記評価値とこれに対応する前記初期条件とを含むデータセットの集合に基づいて、前記各ギャップに固有の特徴量を説明変数とし、前記各ギャップの前記評価値を目的変数とする回帰モデルを生成する回帰モデル生成ステップと、
前記ギャップごとに前記特徴量を取得し、取得した当該特徴量を前記説明変数として前記回帰モデルに入力することにより、前記各ギャップの前記評価値を同定するとともに、同定した当該評価値に基づいて、いずれの前記ギャップを合流目標とすべきかを判断する合流位置評価ステップと、を含み、
前記特徴量は、合流開始時の状態から取得される基本特徴量と、合流開始時の状態に基づいて予測された将来の状態から取得される予測特徴量と、を含む、車両の合流位置評価方法。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の車両の合流位置評価方法において、
前記予測特徴量は、前記回帰モデルが出力する前記評価値と同種の指標である、車両の合流位置評価方法。
【請求項3】
請求項1に記載の車両の合流位置評価方法において、
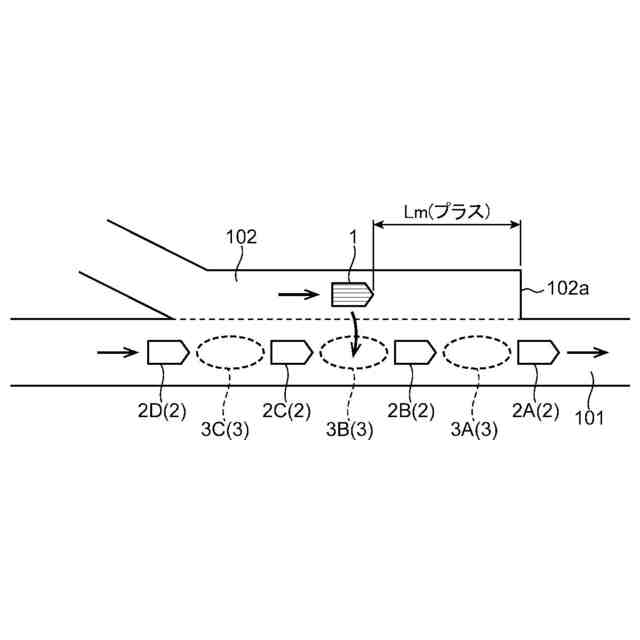
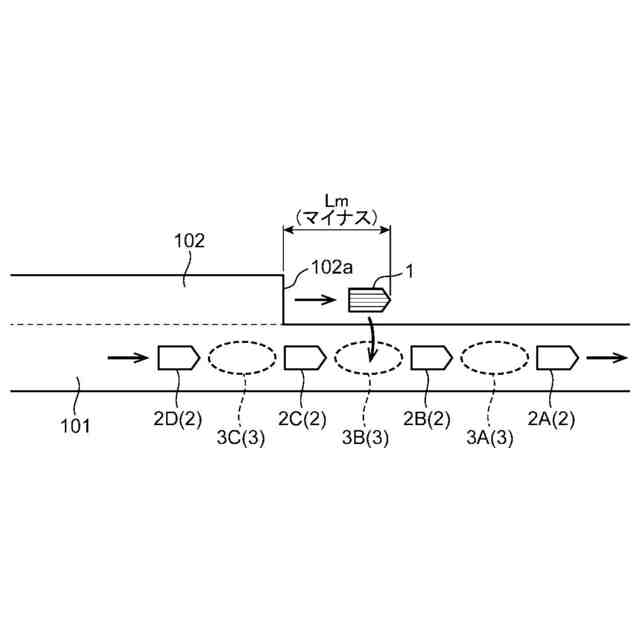
前記評価値算出ステップでは、前記ギャップごとに、前記自車両の合流が完了したか又は合流完了が見込まれた時点における前記支線の終端までの残り距離又は残り時間である合流余裕度を算出するとともに、当該合流余裕度に基づいて前記ギャップごとの前記評価値を算出する、車両の合流位置評価方法。
【請求項4】
請求項3に記載の車両の合流位置評価方法において、
前記合流位置評価ステップでは、前記運転挙動モデルのモデルパラメータを固定した条件で前記シミュレーションを行い、当該シミュレーションの結果から前記ギャップごとに得られる前記合流余裕度を、前記予測特徴量として算出する、車両の合流位置評価方法。
【請求項5】
請求項1~4のいずれか1項に記載の車両の合流位置評価方法において、
前記合流位置評価ステップでは、合流開始時の前記自車両及び前記他車群の位置又は速度と、当該他車群における前記ギャップの位置と、道路形状と、から算出される複数の特徴量を、前記基本特徴量として算出する、車両の合流位置評価方法。
【請求項6】
請求項1~4のいずれか1項に記載の車両の合流位置評価方法において、
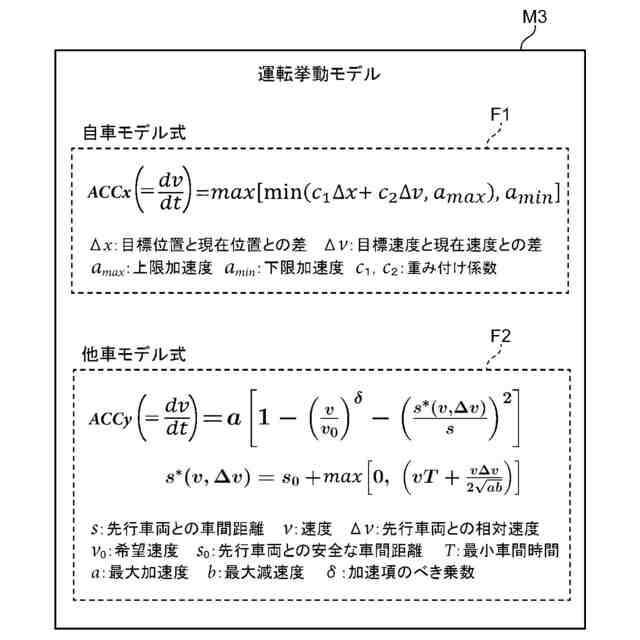
前記運転挙動モデルは、前記他車群の挙動を予測するモデルとして、先行車両との間に適切な車間距離を維持しながら走行するのに必要な加速度を出力する追従走行モデルを含む、車両の合流位置評価方法。
【請求項7】
請求項6に記載の車両の合流位置評価方法において、
前記運転挙動モデルは、前記自車両の挙動を予測するモデルとして、所定の目標位置及び目標速度との差に比例した加速度を出力する比例モデルを含む、車両の合流位置評価方法。
【請求項8】
他車群が走行する本線に自車両が支線から合流するときの合流位置を評価するための回帰モデルを生成する方法であって、
前記自車両及び前記他車群の挙動を予測する運転挙動モデルを用いて、交通環境が異なる種々の初期条件を出発点に、その後の前記自車両及び前記他車群の挙動をシミュレーションするシミュレーションステップと、
前記シミュレーションの結果に基づいて、前記自車両が前記他車群のギャップに割り込む合流動作の成否に関する評価値を前記ギャップごとに算出する評価値算出ステップと、
前記ギャップごとに算出した前記評価値とこれに対応する前記初期条件とを含むデータセットの集合に基づいて、前記各ギャップに固有の特徴量を説明変数とし、前記各ギャップの前記評価値を目的変数とする回帰モデルを生成する回帰モデル生成ステップと、を含み、
前記特徴量は、合流開始時の状態から取得される基本特徴量と、合流開始時の状態に基づいて予測された将来の状態から取得される予測特徴量と、を含む、合流位置評価のためのモデル生成方法。
【請求項9】
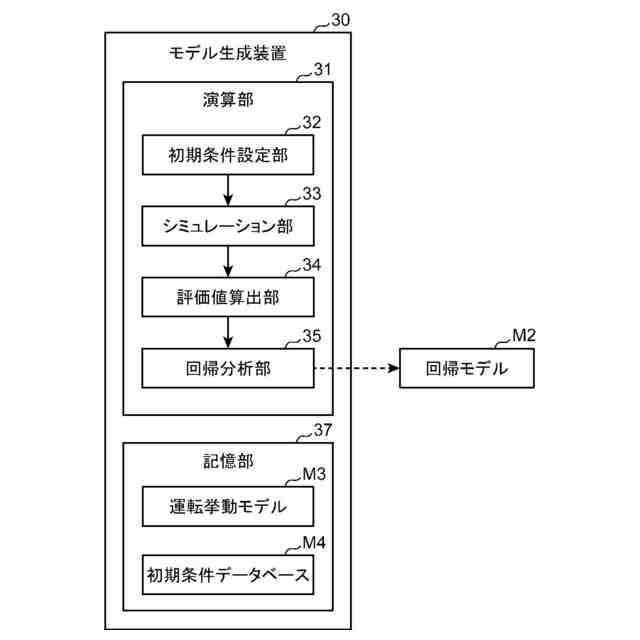
他車群が走行する本線に自車両が支線から合流するときの合流位置を評価するための回帰モデルを生成する装置であって、
前記自車両及び前記他車群の挙動を予測する運転挙動モデルを用いて、交通環境が異なる種々の初期条件を出発点に、その後の前記自車両及び前記他車群の挙動をシミュレーションするシミュレーション部と、
前記シミュレーションの結果に基づいて、前記自車両が前記他車群のギャップに割り込む合流動作の成否に関する評価値を前記ギャップごとに算出する評価値算出部と、
前記ギャップごとに算出した前記評価値とこれに対応する前記初期条件とを含むデータセットの集合に基づいて、前記各ギャップに固有の特徴量を説明変数とし、前記各ギャップの前記評価値を目的変数とする回帰モデルを生成する回帰分析部と、を含み、
前記特徴量は、合流開始時の状態から取得される基本特徴量と、合流開始時の状態に基づいて予測された将来の状態から取得される予測特徴量と、を含む、合流位置評価のためのモデル生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、他車群が走行する本線に自車両が支線から合流するときの合流位置を評価する方法、並びに当該合流位置の評価に用いるモデルを生成する方法及び装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、車両の運転支援もしくは自動運転に関する研究の一環として、車両が支線から本線に合流する合流動作を支援もしくは自動化することが検討されている。例えば、下記特許文献1には、本線に合流する自車両の行動計画を生成する行動計画生成装置において、車両の運転を模擬的に体験することが可能なシミュレータ機能を通じて得られる走行データから生成された学習モデルを用いて、本線を走行する他車両が自車両に対し進路を譲る可能性を表す譲り度合いを算出し、算出した当該譲り度合いに基づいて自車両が本線に合流するときの行動計画を生成することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-146576号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、自車両が本線に合流する際には、本線を走行する他車群における複数のギャップ(車間)のいずれかを目標の合流位置として定める必要がある。しかしながら、上記特許文献1では、目標の合流位置に実際に合流できるか否かの判定、つまり合流位置の評価が、シミュレータ機能を用いた被験者の繰り返し実験から得られる学習モデルの出力値(譲り度合い)に基づき行われるので、その評価ロジックの確立に手間と時間がかかるという問題がある。特に、評価精度を十分に確保しようとすると、実験の回数を十分に増やすなどの対応が必要になり、精度の確保と工数の削減とを両立することは困難である。
【0005】
本発明は、上記のような事情に鑑みてなされたものであり、合流位置の評価を比較的軽い負荷で精度よく行うことが可能な車両の合流位置評価装置及び方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
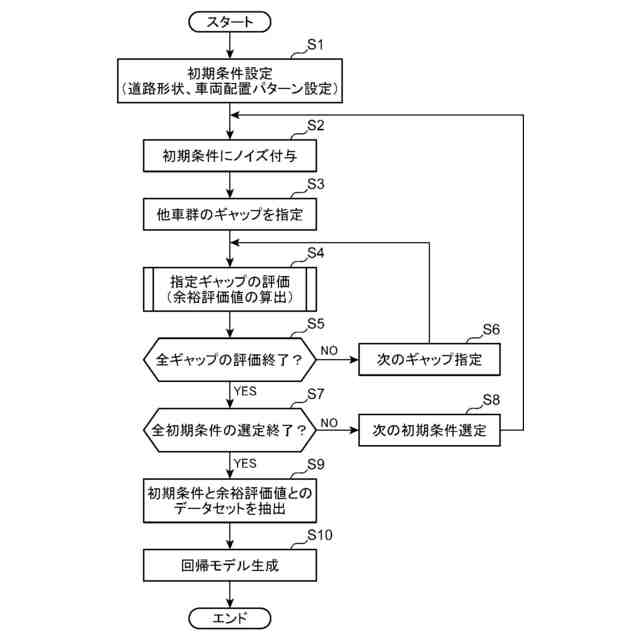
上記課題を解決するためのものとして、本発明の一局面に係る車両の合流位置評価方法は、他車群が走行する本線に自車両が支線から合流するときの合流位置を評価する方法であって、前記自車両及び前記他車群の挙動を予測する運転挙動モデルを用いて、交通環境が異なる種々の初期条件を出発点に、その後の前記自車両及び前記他車群の挙動をシミュレーションするシミュレーションステップと、前記シミュレーションの結果に基づいて、前記自車両が前記他車群のギャップに割り込む合流動作の成否に関する評価値を前記ギャップごとに算出する評価値算出ステップと、算出した前記評価値とこれに対応する前記初期条件とを含むデータセットの集合に基づいて、前記各ギャップに固有の特徴量を説明変数とし、前記各ギャップの前記評価値を目的変数とする回帰モデルを生成する回帰モデル生成ステップと、前記ギャップごとに前記特徴量を取得し、取得した当該特徴量を前記説明変数として前記回帰モデルに入力することにより、前記各ギャップの前記評価値を同定するとともに、同定した当該評価値に基づいて、いずれの前記ギャップを合流目標とすべきかを判断する合流位置評価ステップと、を含み、前記特徴量は、合流開始時の状態から取得される基本特徴量と、合流開始時の状態に基づいて予測された将来の状態から取得される予測特徴量と、を含むものである。
【0007】
本発明によれば、所定の運転挙動モデルを用いて合流時の挙動を予測するシミュレーションが種々の初期条件を出発点に行われるととともに、その結果から得られる初期条件と評価値とのデータセットの集合に基づいて、合流位置を評価するための回帰モデルが生成されるので、強化学習のような複雑な処理を経ることなく、比較的容易に回帰モデルを生成することができる。
【0008】
また、実際の合流シーンにおいては、他車群の各ギャップに対応した固有の特徴量が取得されるとともに、当該特徴量が予め生成された前記回帰モデルに入力されることにより、各ギャップの評価値が同定される。このように、ギャップごとの特徴量を回帰モデルに入力するだけで各ギャップの評価値が得られるので、いずれのギャップを合流目標とすべきかを短時間で判断することができ、十分な計算時間が確保し難い実際の合流シーンにおいても適切に行動計画を決定することができる。
【0009】
しかも、本発明では、回帰モデルに入力される特徴量(説明変数)として、合流開始時の状態から取得される基本特徴量と将来の状態から取得される予測特徴量との組合せが用いられるので、回帰精度を向上させることができる。すなわち、本願発明者の研究によれば、合流開始時の状態に基づく特徴量だけでなく、将来の状態に基づく特徴量も説明変数に含ませた方が、回帰モデルによる予測精度つまり回帰精度が向上することが分かっている。したがって、前記のとおり基本特徴量及び予測特徴量の組合せが説明変数として用いられる本発明によれば、回帰モデルの回帰精度を向上させることができ、各ギャップの評価値を精度よく同定することができる。
【0010】
好ましくは、前記予測特徴量は、前記回帰モデルが出力する前記評価値と同種の指標である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
マツダ株式会社
二次電池
2か月前
マツダ株式会社
二次電池
1か月前
マツダ株式会社
エンジン
1か月前
マツダ株式会社
車載機器
1か月前
マツダ株式会社
二次電池
1か月前
マツダ株式会社
排気システム
1か月前
マツダ株式会社
排気システム
1か月前
マツダ株式会社
車体後部構造
13日前
マツダ株式会社
運転支援装置
1か月前
マツダ株式会社
運転支援装置
1か月前
マツダ株式会社
運転支援装置
1か月前
マツダ株式会社
インバータ装置
1か月前
マツダ株式会社
インバータ装置
1か月前
マツダ株式会社
インバータ装置
1か月前
マツダ株式会社
車両の前部構造
1か月前
マツダ株式会社
インバータ装置
1か月前
マツダ株式会社
車両の上部構造
20日前
マツダ株式会社
バッテリユニット
12日前
マツダ株式会社
バッテリユニット
12日前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
エンジンの制御装置
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
バッテリの制御装置
1か月前
マツダ株式会社
モータ軸受システム
1か月前
マツダ株式会社
二次電池の制御装置
1か月前
マツダ株式会社
モータ軸受システム
1か月前
マツダ株式会社
車両の下部車体構造
1か月前
マツダ株式会社
二次電池の制御装置
1か月前
マツダ株式会社
被覆金属材の試験方法
1か月前
マツダ株式会社
バッテリ状態推定装置
1か月前
マツダ株式会社
車両運転支援システム
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ