TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149407
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024050035
出願日
2024-03-26
発明の名称
車両衝突軽減装置
出願人
株式会社SUBARU
代理人
弁理士法人i-MIRAI
,
個人
,
個人
,
個人
主分類
B60W
30/095 20120101AFI20251001BHJP(車両一般)
要約
【課題】車両の走行制御が、操作部材における乗員の操作によらずに、または、操作部材に対する乗員の操作に反して実行する介入制御を、改善する。
【解決手段】車両走行制御装置は、操作部材と、操作部材における乗員の操作情報に応じて車両の加減速制御を実行可能な制御部と、を有する。制御部は、走行中の車両を減速停止させる介入停止制御と、介入停止制御による介入停止制御を解除する介入解除制御と、車両を加速させる駆動制御と、を実行する。介入解除制御により介入停止制御が解除された後の駆動制御では、操作部材に対する乗員の操作量に応じて加速させる第一の駆動制御と比べて加速を抑制する第二の駆動制御により車両を加速させる。
【選択図】図8
特許請求の範囲
【請求項1】
車両の衝突を軽減するために前記車両の制動装置または操舵装置を作動させることができる車両衝突軽減装置であって、
前記車両に設けられて、前記車両の走行状態として少なくとも前記車両の加速度を検出する加速度センサを含む1乃至複数の車載センサと、
1乃至複数の前記車載センサの検出に基づく情報を取得して、前記車両の前記制動装置および前記操舵装置の少なくとも一方を作動させる衝突軽減処理を実行可能な制御部と、を有し、
前記制御部は、
前記車両の中心位置を、旋回中の前記車両の予測進路の演算始点位置とし、
1乃至複数の前記車載センサの検出に基づく情報またはそれに基づいて演算可能な旋回中の前記車両の横滑り角の方向へ向かう旋回中の前記車両の実進行速度を用いて、
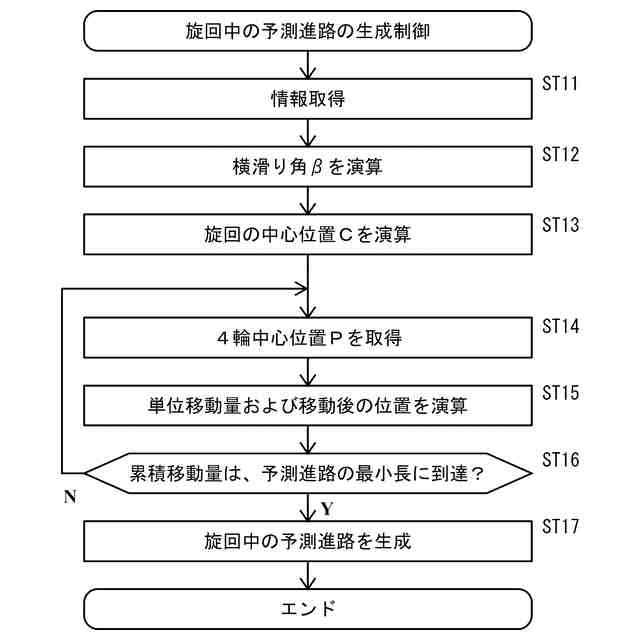
前記演算始点位置からの前記車両の旋回による移動量および移動後の位置を演算することにより、前記車両の旋回中の予測進路を生成し、
旋回中の前記予測進路で前記車両が移動するとした場合での走行障害物との干渉を予測判断し、
前記走行障害物と干渉すると予測判断する場合に、前記制動装置および前記操舵装置の少なくとも一方を作動させる衝突軽減処理を実行する、
車両衝突軽減装置。
続きを表示(約 770 文字)
【請求項2】
前記制御部は、
前記車両に設けられる複数の車輪の中心位置を、旋回中の前記車両の予測進路の前記演算始点位置とする、
請求項1記載の、車両衝突軽減装置。
【請求項3】
前記制御部は、
1乃至複数の前記車載センサの検出に基づいて得られる前記車両の横方向の速度である求心横速度と、前記車両の前後方向の速度である前後速度とから、前記車両の前後方向に対する前記横滑り角を演算し、
1乃至複数の前記車載センサの検出に基づいて得られる前記車両の前記演算始点位置のヨーレートと、前記実進行速度とから、前記車両の旋回半径と旋回中心の位置とを演算し、さらに、
旋回中の前記車両が、前記実進行速度の方向へ向けて、前記旋回中心の位置の周囲で前記旋回半径による定常円旋回をするものとして、旋回中の前記車両の予測進路を演算して生成する、
請求項2記載の、車両衝突軽減装置。
【請求項4】
前記制御部は、
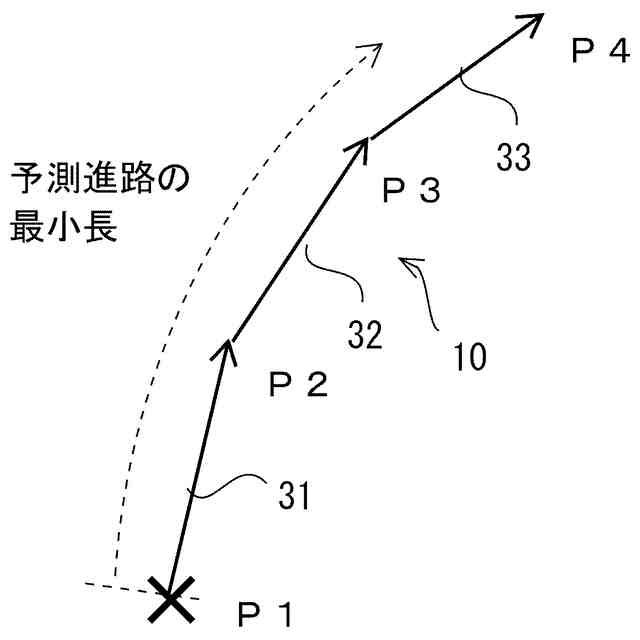
旋回中の前記車両が、前記実進行速度の方向へ向けて、前記旋回中心の位置の周囲で前記旋回半径による定常円旋回をするものとして、単位時間または単位移動量での移動後の位置を繰り返し演算することにより、
所望の長さの旋回中の前記車両の予測進路を生成する、
請求項3記載の、車両衝突軽減装置。
【請求項5】
前記制御部は、
前記車両が、前記実進行速度で旋回中の前記予測進路を走行するとした場合の干渉領域を設定した干渉判定平面を生成し、
生成した前記干渉判定平面における前記走行障害物の位置および移動方向に基づいて、前記走行障害物との干渉を予測判断する、
請求項1から4のいずれか一項記載の、車両衝突軽減装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両衝突軽減装置に関する。
続きを表示(約 3,700 文字)
【背景技術】
【0002】
車両には、たとえば道路を走行する自動車がある。自動車は、ドライバの操作または自動運転により、道路にそって走行するものである。
また、道路は、たとえば他の車両、歩行者、自転車などの他の移動体も使用するものである。車両は、その走行中に、他の移動体などと衝突する可能性がある。
このため、車両では、衝突軽減装置が提案されている(特許文献1)。衝突軽減装置は、他の移動体といった走行障害物との干渉を予測判断し、走行障害物と干渉すると予測判断した場合には衝突軽減処理を実行して車両の制動装置を作動させる。
【先行技術文献】
【特許文献】
【0003】
特開2008-094213号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、車両において実際に生じ得る他の移動体といった走行障害物との干渉を予測判断することは容易ではない。
たとえば、車両が、直線状の道路を安定した速度で走行している場合、車両が実際に移動する実進路とのずれが少ない進路を予測することは比較的容易なことである。
これに対し、車両が、カーブなどを走行している場合には、実進路とのずれが少ない進路を予測することは難しい。特に、平地のカーブではなく、下り坂のカーブや上り坂のカーブを走行している場合、実進路とのずれが少ない車両の旋回進路を予測することは困難である。また、カーブの途中において加減速する場合にも、実進路とのずれが少ない車両の旋回進路を予測することは困難である。これらの走行状態においては、たとえば車両のたとえば重心位置やニュートラルステアポイントの位置を固定的な演算始点位置とし、その演算始点位置から定常円旋回により車両が移動するものとして車両の旋回中の予測進路を演算すると、実進路とのずれは大きくなる可能性がある。
その結果、車両の衝突軽減装置は、走行障害物との干渉を過剰に判断したり、不足して判断したり、し易くなる。車両のスムースで安全な走行が阻害されてしまう可能性が生じ得る。
【0005】
このように車両衝突軽減装置には、旋回中の予測進路の精度を高めて、旋回中の車両のスムースで安全な走行が阻害され難くするように改善することが求められている。
【課題を解決するための手段】
【0006】
本発明の一形態に係る車両衝突軽減装置は、車両の衝突を軽減するために前記車両の制動装置または操舵装置を作動させることができる車両衝突軽減装置であって、前記車両に設けられて、前記車両の走行状態として少なくとも前記車両の加速度を検出する加速度センサを含む1乃至複数の車載センサと、1乃至複数の前記車載センサの検出に基づく情報を取得して、前記車両の前記制動装置および前記操舵装置の少なくとも一方を作動させる衝突軽減処理を実行可能な制御部と、を有し、前記制御部は、前記車両の中心位置を、旋回中の前記車両の予測進路の演算始点位置とし、1乃至複数の前記車載センサの検出に基づく情報またはそれに基づいて演算可能な旋回中の前記車両の横滑り角の方向へ向かう旋回中の前記車両の実進行速度を用いて、前記演算始点位置からの前記車両の旋回による移動量および移動後の位置を演算することにより、前記車両の旋回中の予測進路を生成し、旋回中の前記予測進路で前記車両が移動するとした場合での走行障害物との干渉を予測判断し、前記走行障害物と干渉すると予測判断する場合に、前記制動装置および前記操舵装置の少なくとも一方を作動させる衝突軽減処理を実行する。
【発明の効果】
【0007】
本発明では、旋回中の車両が走行障害物と干渉するか否かを予測判断するために用いる、車両の旋回中の予測進路を、旋回による前記車両の横滑り角を用いた演算により生成する。本発明では、具体的には、前記車両の中心位置を、旋回中の前記車両の予測進路の演算始点位置とし、1乃至複数の前記車載センサの検出に基づく情報またはそれに基づいて演算可能な旋回中の前記車両の横滑り角の方向へ向かう旋回中の前記車両の実進行速度を用いて、前記演算始点位置からの前記車両の旋回による移動量および移動後の位置を演算することにより、前記車両の旋回中の予測進路を生成する。
このように旋回による前記車両の横滑り角を用いて演算することにより、旋回中の予測進路は、実際の車両が旋回することになる実進路と良好に対応するようになり、実進路とのずれが抑えられることが期待できる。その結果、本発明では、旋回中の予測進路を用いた走行障害物との干渉判断において、車両が実際に実進路で旋回した場合における走行障害物との干渉を、大きな過不足を生じることなく確からしく判断することができる。本発明では、走行障害物との干渉についての予測精度を高めて、走行障害物との干渉を、過剰に判断をしたり、不足して判断したり、し難くなることが期待できる。
これに対し、仮にたとえば車両のニュートラルステアポイントの位置や重心の位置などを固定的に、旋回進路を予測する際の演算始点位置として用いる場合、または、自動車が演算開始位置からの一定の旋回半径に沿う定常円旋回により移動するとした場合、それらによる予測進路には、旋回中の車両に実際に作用する横滑りなどの車体挙動が考慮されていない。その結果、それらに基づいて予測される旋回中の予測進路は、実進路とのずれが大きくなり易い。このような横滑りなどの車体挙動を考慮していない旋回中の予測進路であっても、一定の実用性を得ることはできるが、実際には干渉することがない走行障害物との干渉を過剰に判断したり、実際には干渉することになる走行障害物との干渉を不足して判断したり、現実にはそぐわない過不足のある判断をしてしまう可能性が高まる。特に、平地のカーブではなく下り坂または上り坂の勾配があるカーブで旋回する場合や、旋回中に加減速する場合においては、大きな車体挙動が生じ易く、ずれが大きくなりやすい。
そして、このように過不足が大きくなり易い判断に基づいて衝突軽減処理を実行してしまうと、車両のスムースで安全な走行を阻害してしまう可能性が高まる。本発明では、このような可能性を良好に削減し得る。本発明では、勾配があるカーブで旋回する場合の車体挙動を横滑り角の演算で補うことができ、また、旋回中に加減速する場合の車体挙動を横滑り角の演算で補うことができ、過不足となる判断が生じ難くなる。
このように本発明では、旋回中の予測進路の精度を高めて、旋回中の車両のスムースで安全な走行が阻害され難くするようにできる。
【図面の簡単な説明】
【0008】
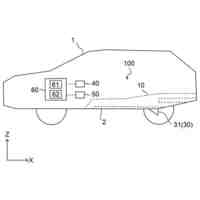
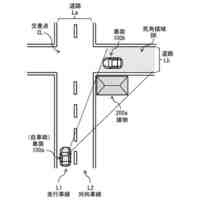
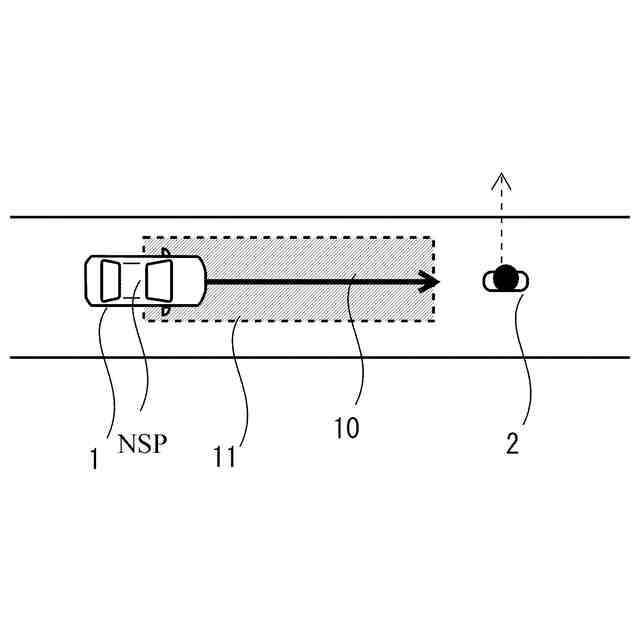
図1は、本発明に係る車両衝突軽減装置を適用可能な自動車が直線状の道路を走行している状態と、その場合での一般的な衝突軽減制御の一例の説明図である。
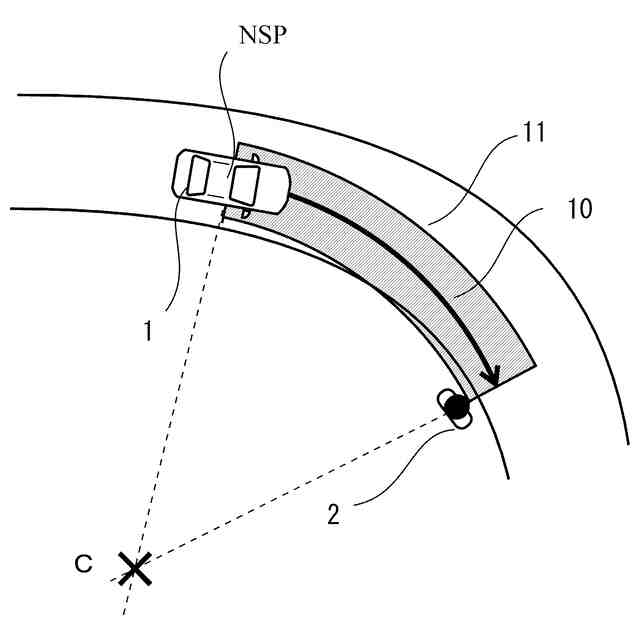
図2は、図1の自動車が湾曲したカーブの道路を走行している状態と、その場合での一般的な衝突軽減制御の一例の説明図である。
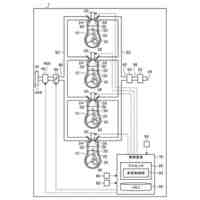
図3は、本発明の実施形態に係る車両衝突軽減装置として機能する自動車の制御系の基本的な構成図である。
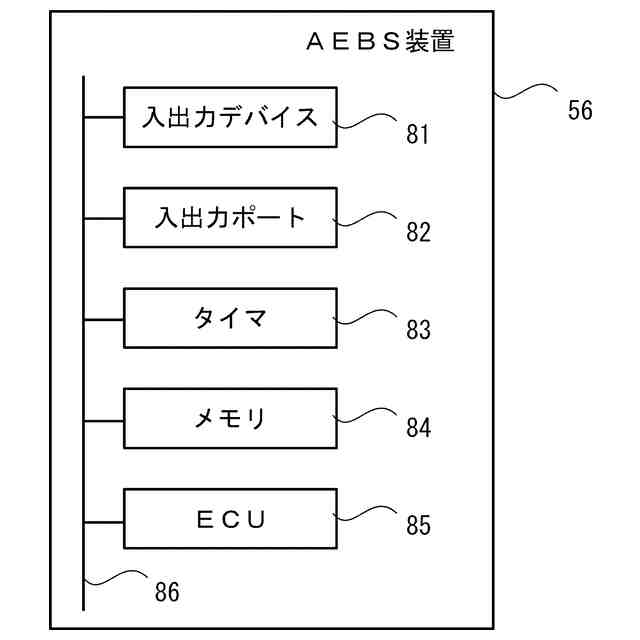
図4は、図3において衝突軽減制御を実行するAEBS装置の基本的な構成図である。
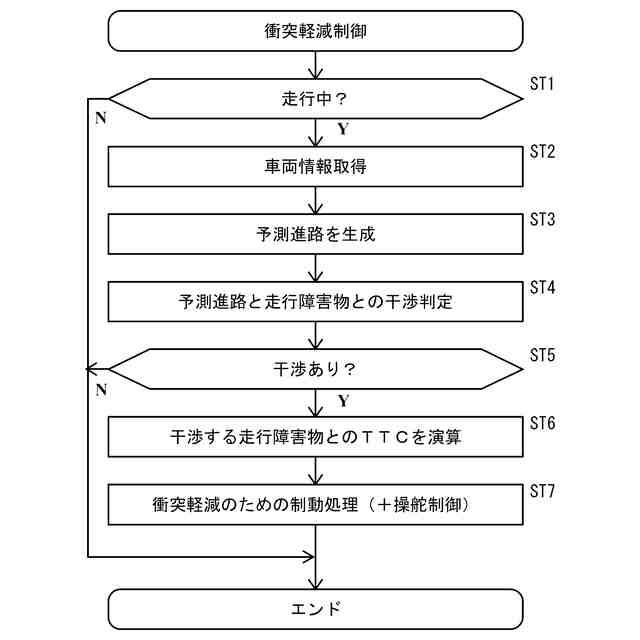
図5は、図4のAEBS装置のCPUが実行する衝突軽減制御の基本的な流れを示すフローチャートである。
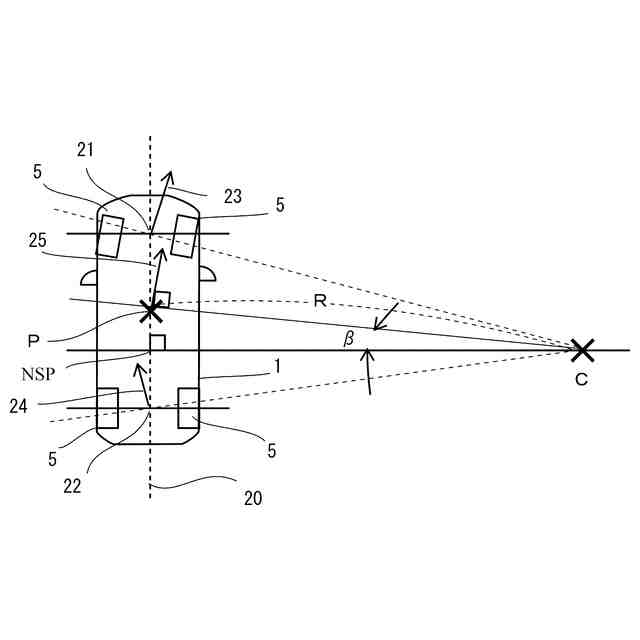
図6は、旋回中の自動車における各種の幾何学的な事項についての説明図である。
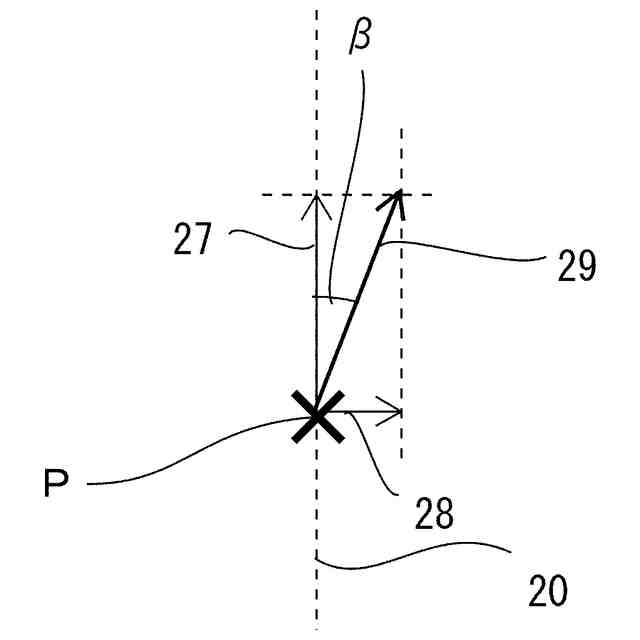
図7は、横滑り角βの演算方法の幾何学的な説明図である。
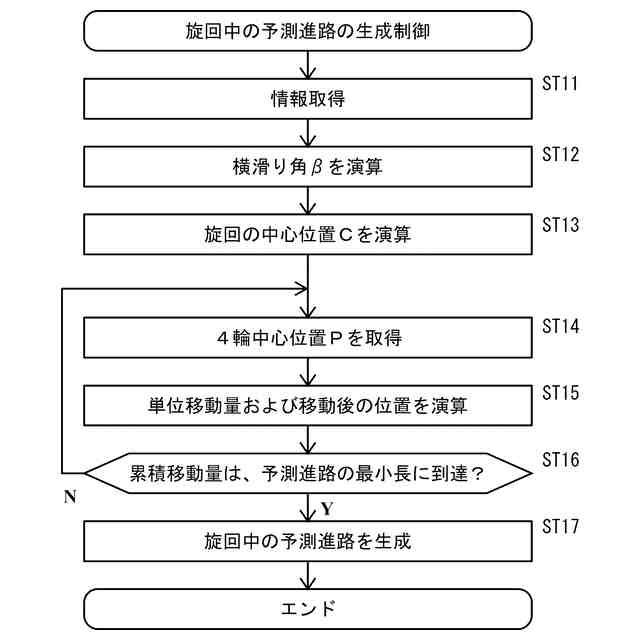
図8は、本実施形態における旋回中の予測進路の生成制御のフローチャートである。
図9は、本実施形態での旋回中の予測進路の一例の説明図である。
図10は、本実施形態における旋回中の予測進路と走行障害物との干渉判定に係る制御のフローチャートである。
図11は、干渉判断に用いる、旋回中の予測進路に対応する干渉判定平面の一例の説明図である。
図12は、本実施形態の制御の下で自動車が湾曲したカーブの道路を走行している状態と、その場合での衝突軽減制御の一例の説明図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を、図面に基づいて説明する。
【0010】
図1は、本発明に係る車両衝突軽減装置を適用可能な自動車1が直線状の道路を走行している状態と、その場合での一般的な衝突軽減制御の一例の説明図である。
図1の自動車1は、直線状の道路を走行している。自動車1は、車両の一例である。車両には、この他にもたとえば、大型のトラック、バス、モータサイクル、自転車、パーソナルモビリティ、がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社SUBARU
車両
1か月前
株式会社SUBARU
車両
27日前
株式会社SUBARU
車両用シート
6日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
整流システム
1か月前
株式会社SUBARU
運転支援装置
27日前
株式会社SUBARU
車両用シート
6日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車両前部構造
21日前
株式会社SUBARU
車体前部構造
1か月前
株式会社SUBARU
車体前部構造
20日前
株式会社SUBARU
車体前部構造
20日前
株式会社SUBARU
操作システム
19日前
株式会社SUBARU
車両用シート
6日前
株式会社SUBARU
シフト制御装置
6日前
株式会社SUBARU
エンジン制御装置
19日前
株式会社SUBARU
電動式全輪駆動車
1か月前
株式会社SUBARU
車両用電池パック
6日前
株式会社SUBARU
車両用周辺監視装置
1か月前
株式会社SUBARU
車両の降車補助装置
1か月前
株式会社SUBARU
ドアロック制御装置
20日前
株式会社SUBARU
電波吸収体の製造方法
12日前
株式会社SUBARU
運転支援装置および車両
1か月前
株式会社SUBARU
車体構造部材の結合構造
1か月前
株式会社SUBARU
運転支援装置および車両
1か月前
株式会社SUBARU
カーテンエアバッグ装置
22日前
株式会社SUBARU
車両の車高自動調整装置
1か月前
株式会社SUBARU
運転補助装置および車両
27日前
株式会社SUBARU
インフレータブル構造体
6日前
株式会社SUBARU
車両用高圧燃料配管構造
6日前
株式会社SUBARU
乗物用遮音構造体、及び車両
1か月前
株式会社SUBARU
フロントピラートリムの取付構造
12日前
株式会社SUBARU
車両および車両用忘れ物防止システム
27日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ