TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025149090
公報種別
公開特許公報(A)
公開日
2025-10-08
出願番号
2024049533
出願日
2024-03-26
発明の名称
走行路認識装置、走行路認識方法及びプログラム
出願人
古河電気工業株式会社
,
古河AS株式会社
代理人
個人
,
個人
主分類
A01B
69/00 20060101AFI20251001BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】農道、圃場等の走行路における死角、段差、または、轍等の障害物に対する距離の検出精度を向上させて、農機等の移動体が農道、圃場等を安全に、かつ効率よく走行することができる走行路認識装置、走行路認識方法及びプログラムを提供すること。
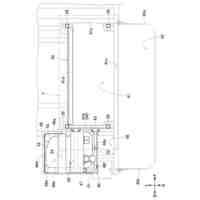
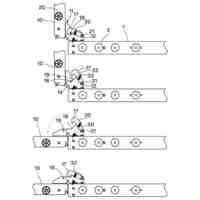
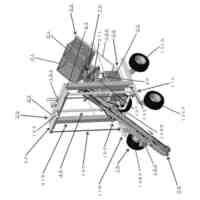
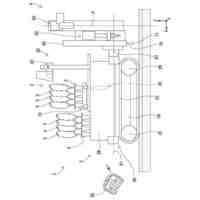
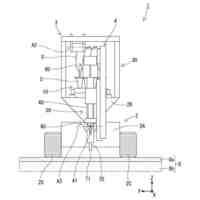
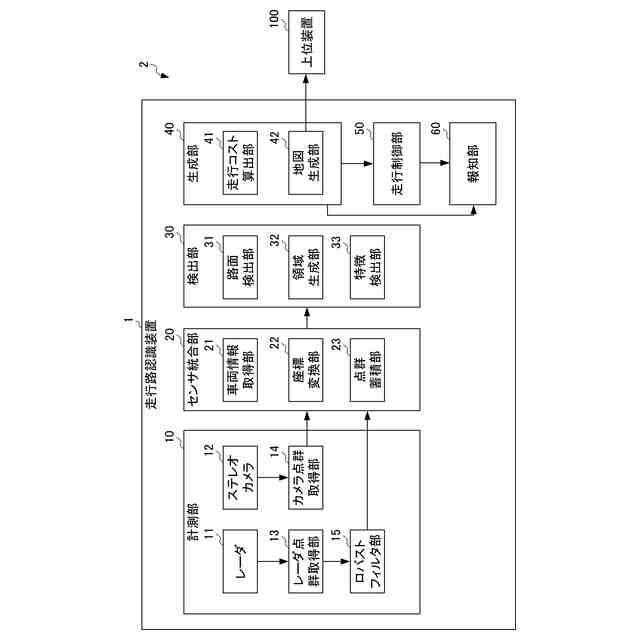
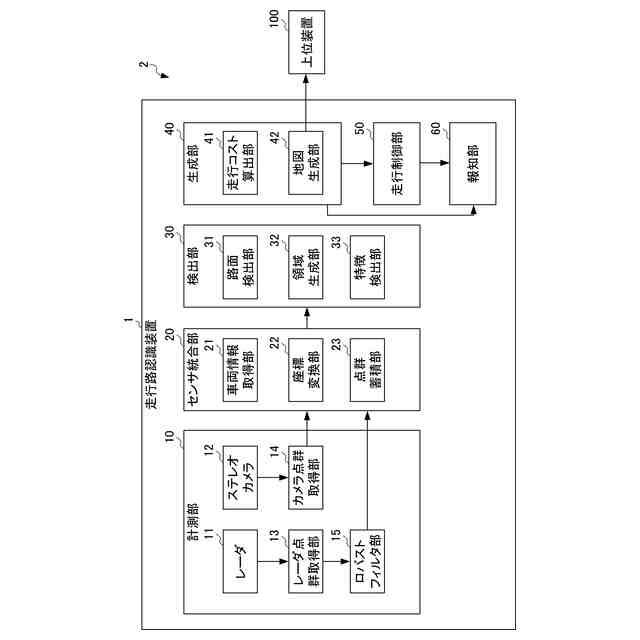
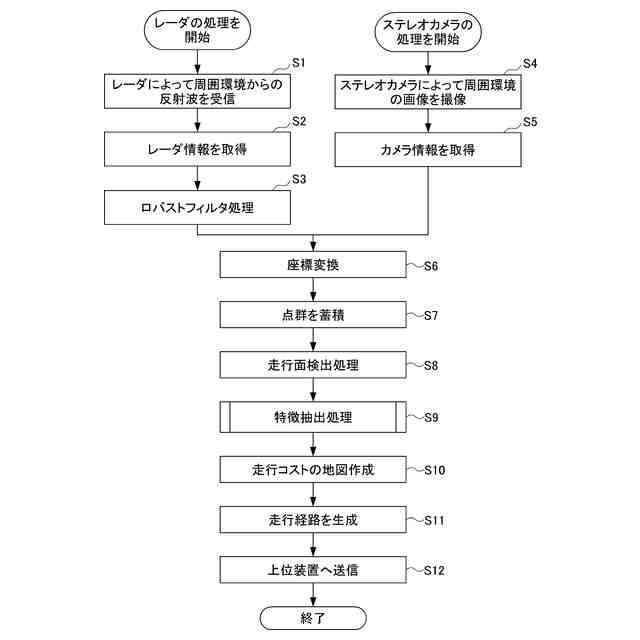
【解決手段】走行路認識装置1は、レーダ11のアンテナの放射方向と、ステレオカメラ12の撮像方向が同一の方向を向くように移動体2に配置されており、当該レーダ11により検出されたレーダ情報と当該ステレオカメラ12により撮像されたカメラ情報とを受信する計測部10と、移動体2が走行する走行路の走行面を仮想的に分割する処理を行う領域生成部32と、計測部10で受信されたレーダ情報とカメラ情報とに基づいて、検出部30によって分割された分割領域ごとに、走行面の特徴を特定する特徴検出部33と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
レーダのアンテナの放射方向と、ステレオカメラの撮像方向が同一の方向を向くように移動体に配置されており、当該レーダにより検出されたレーダ情報と当該ステレオカメラにより撮像されたカメラ情報とを受信する受信部と、
前記移動体が走行する走行路の走行面を仮想的に分割する処理を行う処理部と、
前記受信部で受信された前記レーダ情報と前記カメラ情報とに基づいて、前記処理部によって分割された分割領域ごとに、前記走行面の特徴を特定する特徴検出部と、
を備える走行路認識装置。
続きを表示(約 1,300 文字)
【請求項2】
前記特徴検出部によって検出された前記分割領域ごとの前記走行面の特徴に基づいて、前記移動体が走行可能かどうかの度合いを示す走行コストを前記分割領域ごとに算出する走行コスト算出部を更に備える請求項1に記載の走行路認識装置。
【請求項3】
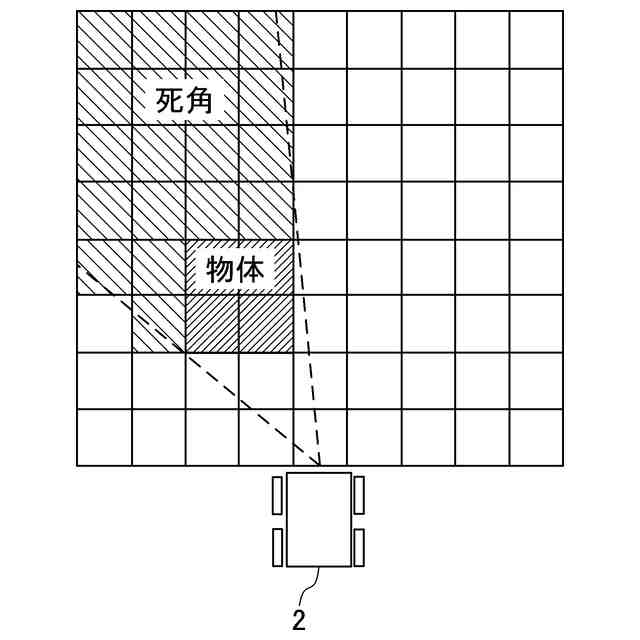
前記走行面の特徴は、段差、前記走行面の状態が変化する境界及び前記ステレオカメラの死角を含み、
前記特徴検出部は、
前記レーダ情報及び前記カメラ情報の少なくとも一方により算出された前記走行面の高さ情報に基づいて、前記分割領域ごとに段差を特定し、
前記カメラ情報により算出された前記走行面の色情報に基づいて、前記走行面の状態が変化する境界を特定し、
前記レーダ情報及び前記カメラ情報により算出された前記走行面の高さ情報に基づいて、前記分割領域ごとの点群の占有率を算出し、当該占有率に基づいて前記ステレオカメラの死角を特定する、
請求項1又は2に記載の走行路認識装置。
【請求項4】
前記特徴検出部は、前記分割領域ごとに前記走行面の高さ情報を算出し、対象となる分割領域の前記走行面の高さ情報と他の分割領域の前記走行面の高さ情報とに基づいて、前記分割領域ごとに前記段差を特定する、請求項3に記載の走行路認識装置。
【請求項5】
前記特徴検出部は、前記分割領域ごとに前記走行面の代表的な高さ情報を算出し、複数の分割領域の代表的な高さ情報から当該複数の分割領域の高さ情報の平均値を算出し、当該複数の分割領域の前記走行面の高さ情報の平均値と前記分割領域ごとの前記走行面の代表的な高さ情報との差分から、前記分割領域ごとに前記段差を特定する、請求項4に記載の走行路認識装置。
【請求項6】
前記特徴検出部は、前記分割領域ごとに前記走行面の代表的な高さ情報を算出し、前記分割領域ごとの高さ情報と、対象となる分割領域の近傍の分割領域の代表的な高さ情報とを比較し、前記段差を特定する、請求項4に記載の走行路認識装置。
【請求項7】
前記走行コスト算出部は、前記走行面の状態が変化する境界と、段差とに基づいて、分割領域ごとに走行コストを算出する、請求項2に記載の走行路認識装置。
【請求項8】
前記特徴検出部は、前記ステレオカメラの死角が検出された場合、前記レーダ情報に基づいて前記分割領域の前記段差を特定する、請求項3に記載の走行路認識装置。
【請求項9】
前記受信部は、前記移動体の前記走行面の位置情報及び強度情報を受信し、
前記受信部における前記レーダの検出範囲と前記ステレオカメラの検出範囲とは、少なくとも一部が重複する、請求項1又は2に記載の走行路認識装置。
【請求項10】
前記走行路の強度情報は、前記ステレオカメラによって計測される前記走行面の色情報と、前記レーダによって計測される前記走行面の振幅情報及びRCS(Radar Cross Section)とを含む、請求項9に記載の走行路認識装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行路認識装置、走行路認識方法及びプログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
果樹園、圃場等の農業環境において移動体が自律走行する際に、農機等の移動体が栽培されている果樹に接触せずに走行でき、また、あぜ道などから外れずに走行できるように、走行路の状態を精度よく把握し、安全かつ効率よく制御することが好ましい。従来、移動体の走行路の状態を検出する技術としては、例えば、特許文献1のような技術が知られている。特許文献1には、3D LiDAR(Light Detection And Ranging)を用いて、車両の周辺における道路面の状態を特定する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特許第7165630号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1は、一般車両が一般道路を走行することを前提としており、農業環境において農機等の移動体が農道、圃場等を走行することを想定していない。このため、特許文献1に記載の技術を利用しても、走行路における死角、段差、または、轍等の障害物に対する距離の検出精度が十分ではなく、農機等の移動体が農道、圃場等を安全に、かつ効率よく走行することが困難である。
【0005】
本願発明の一つの目的は、農道、圃場等の走行路における障害物に対する距離の検出精度を向上させて、農機等の移動体が農道、圃場等を安全に、かつ効率よく走行することができる走行路認識装置、走行路認識方法及びプログラムを提供することである。
【課題を解決するための手段】
【0006】
上記の、及び他の目的を達成するために、本発明に係る走行路認識装置は、レーダのアンテナの放射方向と、ステレオカメラの撮像方向が同一の方向を向くように移動体に配置されており、当該レーダにより検出されたレーダ情報と当該ステレオカメラにより撮像されたカメラ情報とを受信する受信部と、前記移動体が走行する走行路の走行面を仮想的に分割する処理を行う処理部と、前記受信部で受信された前記レーダ情報と前記カメラ情報とに基づいて、前記処理部によって分割された分割領域ごとに、前記走行面の特徴を特定する特徴検出部と、を備える。
【0007】
前記走行路認識装置は、前記特徴検出部によって検出された前記分割領域ごとの前記走行面の特徴に基づいて、前記移動体が走行可能かどうかの度合いを示す走行コストを前記分割領域ごとに算出する走行コスト算出部を更に備える。
【0008】
前記走行面の特徴は、段差、前記走行面の状態が変化する境界及び前記ステレオカメラの死角を含み、前記特徴検出部は、前記レーダ情報及び前記カメラ情報の少なくとも一方により算出された前記走行面の高さ情報に基づいて、前記分割領域ごとに段差を特定し、前記カメラ情報により算出された前記走行面の色情報に基づいて、前記走行面の状態が変化する境界を特定し、前記レーダ情報及び前記カメラ情報により算出された前記走行面の高さ情報に基づいて、前記分割領域ごとの点群の占有率を算出し、当該占有率に基づいて前記ステレオカメラの死角を特定してもよい。
【0009】
前記特徴検出部は、前記分割領域ごとに前記走行面の高さ情報を算出し、対象となる分割領域の高さ情報と他の分割領域の前記走行面の高さ情報とに基づいて、前記分割領域ごとに前記段差を特定してもよい。
【0010】
前記特徴検出部は、前記分割領域ごとに前記走行面の代表的な高さ情報を算出し、複数の分割領域の代表的な高さ情報から当該複数の分割領域の高さ情報の平均値を算出し、当該複数の分割領域の高さ情報の平均値と分割領域ごとの代表的な高さ情報との差分から、前記分割領域ごとに前記段差を特定してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
7日前
個人
四足動物用装着具
今日
大栄工業株式会社
捕獲器
7日前
井関農機株式会社
作業車両
今日
みのる産業株式会社
茎葉処理装置
1日前
株式会社小川農具製作所
穴明け装置
8日前
グローブライド株式会社
釣竿
8日前
グローブライド株式会社
釣竿
7日前
グローブライド株式会社
魚釣用リール
6日前
株式会社クボタ
移植機
今日
株式会社クボタ
移植機
今日
株式会社クボタ
コンバイン
8日前
株式会社クボタ
コンバイン
8日前
花王株式会社
硬質表面用拭浄シート
2日前
株式会社ユシロ
光徐放性組成物、及び物品
8日前
株式会社クボタ
コンバイン
8日前
株式会社スズテック
播種装置の移送台
6日前
株式会社クボタ
生育管理システム
1日前
株式会社神鋼環境ソリューション
供試魚保持装置
8日前
株式会社神鋼環境ソリューション
供試魚投入装置
8日前
住化エンバイロメンタルサイエンス株式会社
抗ウイルス剤
6日前
一般社団法人ペットエンバーミングラボ
遺体保存液
7日前
日本製紙クレシア株式会社
ペット用吸収性物品
6日前
井関農機株式会社
作業車両
6日前
本田技研工業株式会社
除草装置
6日前
井関農機株式会社
作業車両
7日前
井関農機株式会社
作業車両
8日前
個人
鳥獣忌避具
7日前
住化エンバイロメンタルサイエンス株式会社
害虫防除用組成物
6日前
トヨタ自動車株式会社
伐倒支援装置
2日前
カヤバ株式会社
苗木植付装置
6日前
オーティス株式会社
釣り用のおもり
1日前
大和ハウス工業株式会社
栽培システム及び栽培方法
今日
カヤバ株式会社
苗木植付装置
6日前
カヤバ株式会社
苗木植付装置
6日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ