TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025147906
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048412
出願日
2024-03-25
発明の名称
物体検知システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
G06T
7/00 20170101AFI20250930BHJP(計算;計数)
要約
【課題】物体検知精度が向上し得る学習データを効率良く収集できる物体検知システムを提供すること。
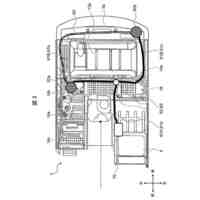
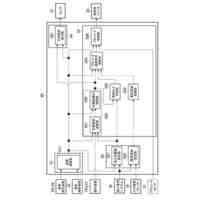
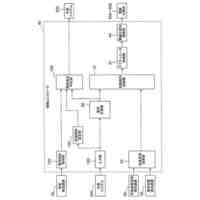
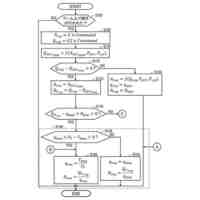
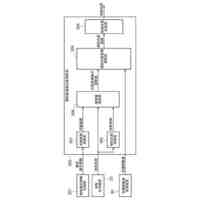
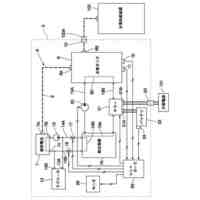
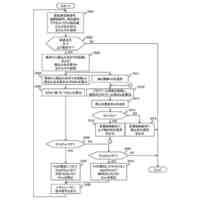
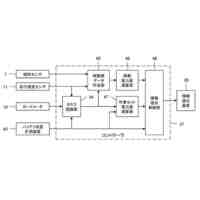
【解決手段】カメラ19で取得された画像を入力して、機械学習された物体検知モデルを用いて画像上における検知対象を検知する制御装置22と、検知対象が写った複数の画像と当該複数の画像上における検知対象の位置情報とを含む教師データに基づいて、物体検知モデルを生成する学習装置23とを備えた物体検知システムにおいて、学習装置23は、教師データに基づいて、複数の画像上における検知対象の位置の分布を示す位置分布データを生成してモニタに表示する。
【選択図】 図1
特許請求の範囲
【請求項1】
カメラと、
前記カメラで取得された画像を入力して、機械学習された物体検知モデルを用いて前記画像上における検知対象を検知する第1制御装置と、
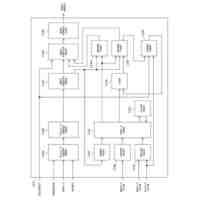
前記カメラにより撮影され前記検知対象が写った複数の画像と当該複数の画像上における前記検知対象の位置情報とを含む教師データに基づいて、前記物体検知モデルを生成する第2制御装置とを備えた物体検知システムにおいて、
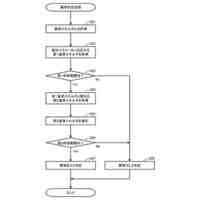
前記第2制御装置は、前記教師データに基づいて、前記複数の画像上における前記検知対象の位置の分布を示す位置分布データを生成し、
生成された前記位置分布データでは、前記検知対象が存在する位置と前記検知対象が存在しない位置とが区別してモニタに表示される
ことを特徴とする物体検知システム。
続きを表示(約 1,200 文字)
【請求項2】
請求項1の物体検知システムにおいて、
前記位置分布データは、前記教師データにおける画像の形状を模したマップ上に、前記複数の画像上における前記検知対象の位置の分布を示した度数分布図である
ことを特徴とする物体検知システム。
【請求項3】
請求項1の物体検知システムにおいて、
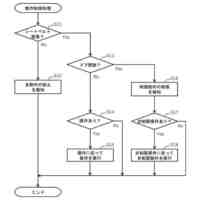
前記第2制御装置は、前記位置分布データが前記モニタに表示された後に入力される学習開始指令に基づいて、前記物体検知モデルを改めて生成する
ことを特徴とする物体検知システム。
【請求項4】
請求項1の物体検知システムにおいて、
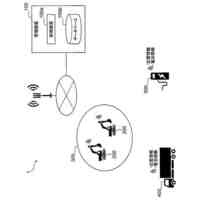
前記カメラと前記第1制御装置と前記モニタとは作業機械に搭載され、
前記第1制御装置と前記第2制御装置とは互いに通信可能に接続され、
前記教師データは、前記カメラによって取得された画像から生成され、
前記第2制御装置は、前記位置分布データが前記モニタに表示された後に前記第1制御装置から入力される学習開始指令に基づいて、前記教師データから前記物体検知モデルを改めて生成する
ことを特徴とする物体検知システム。
【請求項5】
請求項1の物体検知システムにおいて、
前記カメラは、前記第1制御装置と接続して作業現場に設置され、
前記モニタは、前記第1制御装置と互いに通信可能なモバイル端末に搭載され、
前記第1制御装置と前記第2制御装置とは互いに通信可能に接続され、
前記教師データは、前記カメラによって取得された画像から生成され、
前記第2制御装置は、前記位置分布データが前記モニタに表示された後に前記モバイル端末から入力される学習開始指令に基づいて、前記教師データから前記物体検知モデルを改めて生成する
ことを特徴とする物体検知システム。
【請求項6】
請求項1の物体検知システムにおいて、
前記教師データに含まれる前記複数の画像は、センササイズ、焦点距離、設置高さ、及び設置ピッチ角度を含むカメラ仕様が同じ複数のカメラによって撮影された画像であり、
前記第2制御装置は、前記カメラ仕様が同じ教師データに基づいて前記物体検知モデル及び前記位置分布データを生成する
ことを特徴とする物体検知システム。
【請求項7】
請求項1の物体検知システムにおいて、
前記カメラと前記第1制御装置とは作業機械に搭載され、
前記第2制御装置は、前記モニタと接続されたサーバであり、
前記第1制御装置と前記第2制御装置とは互いに通信可能に接続され、
前記教師データは、前記カメラによって取得された画像から生成され、
前記第2制御装置は、前記位置分布データを前記モニタに表示した後に入力される学習開始指令に基づいて、前記教師データから前記物体検知モデルを改めて生成する
ことを特徴とする物体検知システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば現場管理システムや作業機械に適用される物体検知システムに関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
近年、計算機性能の向上より、ディープニューラルネットワーク等を用いた機械学習の画像認識技術が著しく発展している。作業現場においても、油圧ショベル等の作業機械の車載装置や、現場に設置したサイトセンサの形態で、機械学習を用いて画像から物体を検知する技術の導入が進んでいる。
【0003】
機械学習を用いた画像認識技術の検知精度には、学習データが大きく関係し、学習データは極めて重要である。一般に、学習データを取得した環境と類似する環境では検知精度が高く、未学習の環境においては検知精度が低い。
【0004】
作業機械が働く作業現場では、作業の内容や地域の違いなどによって、各現場で取得される画像の背景の種類が極めて多いため、検知精度の良いモデルを作ることは容易ではない。そのため、作業現場の画像データを利用して学習を行い、検知精度を上げる技術が期待されている。
【0005】
特許文献1は、作業現場で学習データを収集し、それらを学習サーバに送信して学習を行い、その学習結果を物体検知に利用できるシステムを提案している。
【先行技術文献】
【特許文献】
【0006】
特開2022-150641号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
物体検知システムの目的は、予め定められた検知対象を画像から精度良く検出することにある。例えば、検知対象として作業員を検知するためには、作業員を含む画像を学習データとして収集して学習を行う必要がある。特許文献1のシステムを利用すれば、作業現場から画像を収集し、その画像データを用いて学習を行い、その学習結果を作業現場での物体検知に用いることができる。
【0008】
しかし、例えば検知対象を含まない背景ばかりの画像データを学習データとして収集した場合には、システムの検知性能が低下するおそれがある。また、カメラ(カメラ)と検知対象との相対位置によって画像における検知対象の形状と大きさが異なる。そのため、様々な形状と大きさの検知対象を精度よく検知するためには、様々な相対位置に置かれた検知対象の画像データを収集する必要がある。
【0009】
ところが、特許文献1のシステムは、検知精度向上のために学習データとしてどのような画像データを収集すれば良いかについては言及がなく、無作為に画像データを取集するだけでは検知精度の向上は期待し難い。
【0010】
本発明の目的は、物体検知精度が向上し得る学習データを効率良く収集できる物体検知システムを提供することにある。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
今日
日立建機株式会社
作業車両
4日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
26日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
建設機械
8日前
日立建機株式会社
作業機械
8日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
建設機械
4日前
日立建機株式会社
建設機械
4日前
日立建機株式会社
建設機械
今日
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
今日
日立建機株式会社
建設機械
今日
日立建機株式会社
作業車両
今日
日立建機株式会社
作業車両
今日
日立建機株式会社
作業機械
4日前
日立建機株式会社
建設機械
4日前
日立建機株式会社
油圧機器
4日前
日立建機株式会社
電動建設機械
今日
日立建機株式会社
動力伝達装置
今日
日立建機株式会社
情報処理装置
2か月前
日立建機株式会社
液冷式抵抗器
4日前
日立建機株式会社
油圧システム
8日前
日立建機株式会社
動力伝達装置
4日前
日立建機株式会社
電動式作業機械
4日前
日立建機株式会社
ダンプトラック
4日前
日立建機株式会社
充電支援システム
1か月前
日立建機株式会社
部品需要予測装置
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ