TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025147861
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048339
出願日
2024-03-25
発明の名称
計測方法、計測装置、計測システム及び計測プログラム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
G01G
19/03 20060101AFI20250930BHJP(測定;試験)
要約
【課題】鉄道車両の橋梁に対する進入時刻及び進出時刻を精度よく算出可能な計測方法を提供すること。
【解決手段】橋梁の観測点の観測データに基づいて得られる前記橋梁の変位に基づいて、前記鉄道車両の前記橋梁に対する仮の進入時刻及び仮の進出時刻を算出する工程と、前記橋梁のたわみの近似式と、前記仮の進入時刻及び前記仮の進出時刻と、予め作成された環境情報とに基づいて、前記鉄道車両による前記橋梁のたわみ量を算出する工程と、前記変位と前記たわみ量とに基づいて、前記仮の進入時刻の誤差を補正するための進入時刻補正値、及び前記仮の進出時刻の誤差を補正するための進出時刻補正値を算出する工程と、前記仮の進入時刻に前記進入時刻補正値を加算して前記鉄道車両の前記橋梁に対する進入時刻を算出し、前記仮の進出時刻に前記進出時刻補正値を加算して前記鉄道車両の前記橋梁に対する進出時刻を算出する工程と、を含む、計測方法。
【選択図】図18
特許請求の範囲
【請求項1】
橋梁の観測点を観測する観測装置から出力される、前記橋梁を走行する鉄道車両の前記観測点への作用に対する応答を含む観測データを取得する観測データ取得工程と、
前記観測データに基づいて得られる前記橋梁の変位に基づいて、前記鉄道車両の前記橋梁に対する仮の進入時刻及び仮の進出時刻を算出する仮進入進出時刻算出工程と、
前記橋梁のたわみの近似式と、前記仮の進入時刻及び前記仮の進出時刻と、予め作成された前記鉄道車両の寸法及び前記橋梁の寸法を含む環境情報とに基づいて、前記鉄道車両による前記橋梁のたわみ量を算出するたわみ量算出工程と、
前記変位と前記たわみ量とに基づいて、前記仮の進入時刻の誤差を補正するための進入時刻補正値、及び前記仮の進出時刻の誤差を補正するための進出時刻補正値を算出する補正値算出工程と、
前記仮の進入時刻に前記進入時刻補正値を加算して前記鉄道車両の前記橋梁に対する進入時刻を算出し、前記仮の進出時刻に前記進出時刻補正値を加算して前記鉄道車両の前記橋梁に対する進出時刻を算出する進入進出時刻算出工程と、
を含む、計測方法。
続きを表示(約 1,300 文字)
【請求項2】
請求項1において、
前記環境情報は、前記鉄道車両の車両数を含む、計測方法。
【請求項3】
請求項1において、
前記観測データに基づいて、前記鉄道車両の車両数を算出する車両数算出工程をさらに含み、
前記たわみ量算出工程では、前記車両数に基づいて前記たわみ量を算出する、計測方法。
【請求項4】
請求項1において、
前記仮進入進出時刻算出工程では、所定のハイパスフィルターを用いて前記変位をハイパスフィルター処理して変位波形を算出し、
前記補正値算出工程は、
前記ハイパスフィルターを用いて前記たわみ量をハイパスフィルター処理してたわみ波形を算出する工程と、
前記変位波形と前記たわみ波形とを比較して、前記進入時刻補正値及び前記進出時刻補正値を算出する工程と、
を含む、計測方法。
【請求項5】
請求項4において、
前記ハイパスフィルターのカットオフ周波数は、前記鉄道車両による前記橋梁の走行に起因して生じる前記橋梁の振動の基本周波数よりも低い、計測方法。
【請求項6】
請求項1において、
前記補正値算出工程は、
前記たわみ量の振幅を前記変位の振幅に合わせるように調整してたわみ波形を算出する工程と、
前記変位の波形と前記たわみ波形とを比較して、前記進入時刻補正値及び前記進出時刻補正値を算出する工程と、
を含む、計測方法。
【請求項7】
請求項1において、
前記観測装置は、加速度センサー、変位計又は画像測定装置である、計測方法。
【請求項8】
請求項1において、
前記橋梁は、BWIM(Bridge Weigh in Motion)が機能する構造である、計測方法。
【請求項9】
橋梁の観測点を観測する観測装置から出力される、前記橋梁を走行する鉄道車両の前記観測点への作用に対する応答を含む観測データを取得する観測データ取得部と、
前記観測データに基づいて得られる前記橋梁の変位に基づいて、前記鉄道車両の前記橋梁に対する仮の進入時刻及び仮の進出時刻を算出する仮進入進出時刻算出部と、
前記橋梁のたわみの近似式と、前記仮の進入時刻及び前記仮の進出時刻と、予め作成された前記鉄道車両の寸法及び前記橋梁の寸法を含む環境情報とに基づいて、前記鉄道車両による前記橋梁のたわみ量を算出するたわみ量算出部と、
前記変位と前記たわみ量とに基づいて、前記仮の進入時刻の誤差を補正するための進入時刻補正値、及び前記仮の進出時刻の誤差を補正するための進出時刻補正値を算出する補正値算出部と、
前記仮の進入時刻に前記進入時刻補正値を加算して前記鉄道車両の前記橋梁に対する進入時刻を算出し、前記仮の進出時刻に前記進出時刻補正値を加算して前記鉄道車両の前記橋梁に対する進出時刻を算出する進入進出時刻算出部と、
を含む、計測装置。
【請求項10】
請求項9に記載の計測装置と、
前記観測装置と、
を備えた、計測システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測方法、計測装置、計測システム及び計測プログラムに関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
特許文献1には、鉄道橋梁に装着された加速度センサーと、鉄道橋梁が無載荷状態であるときの加速度センサーの出力を加速度のゼロ点として設定し、鉄道橋梁が載荷状態であるときに加速度センサーが出力した加速度のゼロ点を補正し、ゼロ点補正後に2回積分、ベイズ推定、カルマンフィルター等の適用により、ドリフトを抑制して鉄道橋梁のたわみ量を推定するたわみ測定装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-049095号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、橋梁に設けられた加速度センサーが検出する加速度は、鉄道車両の各車両の荷重の印加により発生する振動だけでなく環境振動などによっても変化するため、鉄道車両の橋梁への進入時や進出時に、加速度センサーの出力に明瞭な変化があるとは限らない。したがって、特許文献1に記載のたわみ測定装置では、鉄道車両の鉄道橋梁に対する進入時刻及び進出時刻を精度よく算出することができないおそれがある。
【課題を解決するための手段】
【0005】
本発明に係る計測方法の一態様は、
橋梁の観測点を観測する観測装置から出力される、前記橋梁を走行する鉄道車両の前記観測点への作用に対する応答を含む観測データを取得する観測データ取得工程と、
前記観測データに基づいて得られる前記橋梁の変位に基づいて、前記鉄道車両の前記橋梁に対する仮の進入時刻及び仮の進出時刻を算出する仮進入進出時刻算出工程と、
前記橋梁のたわみの近似式と、前記仮の進入時刻及び前記仮の進出時刻と、予め作成された前記鉄道車両の寸法及び前記橋梁の寸法を含む環境情報とに基づいて、前記鉄道車両による前記橋梁のたわみ量を算出するたわみ量算出工程と、
前記変位と前記たわみ量とに基づいて、前記仮の進入時刻の誤差を補正するための進入時刻補正値、及び前記仮の進出時刻の誤差を補正するための進出時刻補正値を算出する補正値算出工程と、
前記仮の進入時刻に前記進入時刻補正値を加算して前記鉄道車両の前記橋梁に対する進入時刻を算出し、前記仮の進出時刻に前記進出時刻補正値を加算して前記鉄道車両の前記橋梁に対する進出時刻を算出する進入進出時刻算出工程と、
を含む。
【0006】
本発明に係る計測装置の一態様は、
橋梁の観測点を観測する観測装置から出力される、前記橋梁を走行する鉄道車両の前記観測点への作用に対する応答を含む観測データを取得する観測データ取得部と、
前記観測データに基づいて得られる前記橋梁の変位に基づいて、前記鉄道車両の前記橋梁に対する仮の進入時刻及び仮の進出時刻を算出する仮進入進出時刻算出部と、
前記橋梁のたわみの近似式と、前記仮の進入時刻及び前記仮の進出時刻と、予め作成された前記鉄道車両の寸法及び前記橋梁の寸法を含む環境情報とに基づいて、前記鉄道車両による前記橋梁のたわみ量を算出するたわみ量算出部と、
前記変位と前記たわみ量とに基づいて、前記仮の進入時刻の誤差を補正するための進入時刻補正値、及び前記仮の進出時刻の誤差を補正するための進出時刻補正値を算出する補正値算出部と、
前記仮の進入時刻に前記進入時刻補正値を加算して前記鉄道車両の前記橋梁に対する進入時刻を算出し、前記仮の進出時刻に前記進出時刻補正値を加算して前記鉄道車両の前記橋梁に対する進出時刻を算出する進入進出時刻算出部と、
を含む。
【0007】
本発明に係る計測システムの一態様は、
前記計測装置の一態様と、
前記観測装置と、
を備える。
【0008】
本発明に係る計測プログラムの一態様は、
橋梁の観測点を観測する観測装置から出力される、前記橋梁を走行する鉄道車両の前記観測点への作用に対する応答を含む観測データを取得する観測データ取得工程と、
前記観測データに基づいて得られる前記橋梁の変位に基づいて、前記鉄道車両の前記橋梁に対する仮の進入時刻及び仮の進出時刻を算出する仮進入進出時刻算出工程と、
前記橋梁のたわみの近似式と、前記仮の進入時刻及び前記仮の進出時刻と、予め作成された前記鉄道車両の寸法及び前記橋梁の寸法を含む環境情報とに基づいて、前記鉄道車両による前記橋梁のたわみ量を算出するたわみ量算出工程と、
前記変位と前記たわみ量とに基づいて、前記仮の進入時刻の誤差を補正するための進入時刻補正値、及び前記仮の進出時刻の誤差を補正するための進出時刻補正値を算出する補正値算出工程と、
前記仮の進入時刻に前記進入時刻補正値を加算して前記鉄道車両の前記橋梁に対する進入時刻を算出し、前記仮の進出時刻に前記進出時刻補正値を加算して前記鉄道車両の前記橋梁に対する進出時刻を算出する進入進出時刻算出工程と、
をコンピューターに実行させる。
【図面の簡単な説明】
【0009】
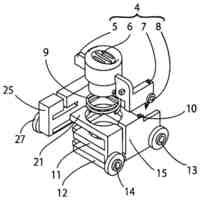
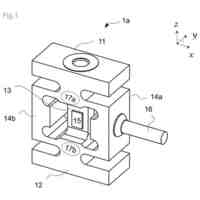
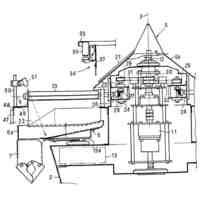
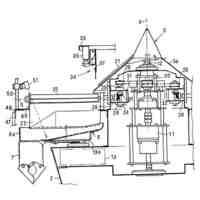
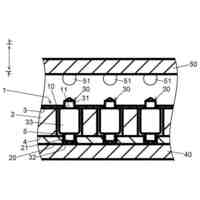
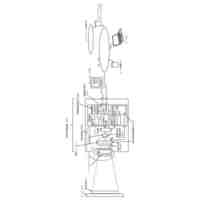
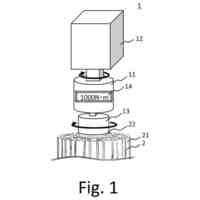
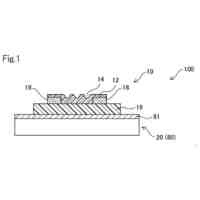
第1実施形態の計測システムの構成例を示す図。
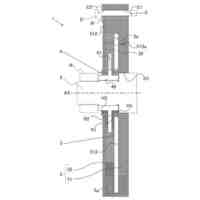
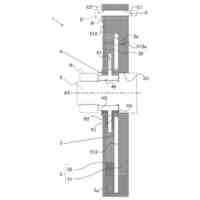
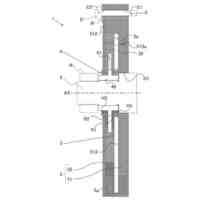
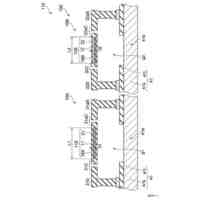
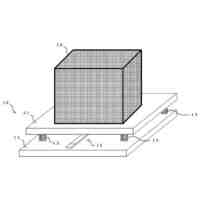
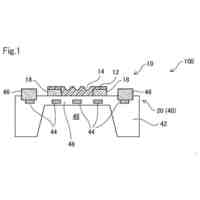
図1の上部構造をA-A線で切断した断面図。
加速度センサーが検出する加速度の説明図。
鉄道車両が橋梁を走行したときの加速度α(t)の一例を示す図。
加速度α(t)を高速フーリエ変換処理して得られたパワースペクトラム密度を示す図。
ハイパスフィルターの利得周波数特性の一例を示す図。
変位波形u
α_hp
(t)と仮の進入時刻t
i_tmp
及び仮の進出時刻t
o_tmp
との関係の一例を示す図。
変位波形u
α_hp
(t)における仮の進入時刻t
i_tmp
と仮の進出時刻t
o_tmp
との間の期間を拡大した図。
車両の長さL
C
(C
m
)及び車軸間の距離La(a
w
(C
m
,n))の一例を示す図。
橋梁の構造モデルの説明図。
たわみ量w
std
(a
w
(C
m
,n),t)の一例を示す図。
たわみ量C
std
(C
m
,t)の一例を示す図。
たわみ量T
std
(t)の一例を示す図。
たわみ量T
std
(t)とたわみ量w
std
(a
w
(C
m
,n),t)との関係を示す図。
たわみ量T
std
(t)をハイパスフィルター処理して得られるたわみ波形u
M_hp
(t)を示す図。
変位波形u
α_hp
(t)及びたわみ波形u
M_hp
(t)と、進入時刻補正値t
i_cor
及び進出時刻補正値t
o_cor
との関係を示す図。
加速度α(t)を2回積分して得られる変位u
α
(t)と進入時刻t
i
及び進出時刻t
o
との関係を示す図。
計測方法の手順の一例を示すフローチャート図。
第1実施形態における補正値算出工程の手順の一例を示すフローチャート図。
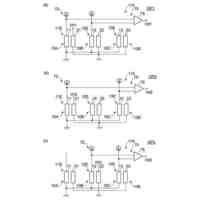
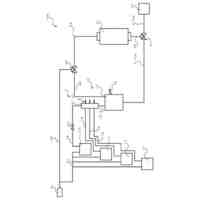
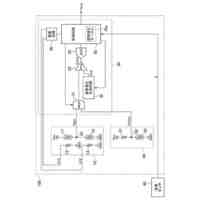
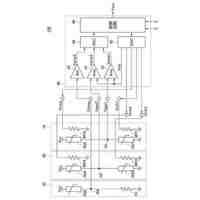
センサー、計測装置及び監視装置の構成例を示す図。
第2実施形態の計測システムの構成例を示す図。
第2実施形態の計測システムの他の構成例を示す図。
変位u
d
(t)の一例を示す図。
変位u
d
(t)と仮の進入時刻t
i_tmp
及び仮の進出時刻t
o_tmp
との関係の一例を示す図。
変位u
d
(t)とたわみ量T
std
(t)との関係を示す図。
変位u
d
(t)及びたわみ波形u
M
(t)と、進入時刻補正値t
i_cor
及び進出時刻補正値t
o_cor
との関係を示す図。
第2実施形態における補正値算出工程の手順の一例を示すフローチャート図。
変形例における変位波形u
d_hp
(t)と仮の進入時刻t
i_tmp
及び仮の進出時刻t
o_tmp
との関係の一例を示す図。
変形例における変位波形u
d_hp
(t)及びたわみ波形u
M_hp
(t)と、進入時刻補正値t
i_cor
及び進出時刻補正値t
o_cor
との関係を示す図。
変形例における変位u
d
(t)と進入時刻t
i
及び進出時刻t
o
との関係を示す図。
【発明を実施するための形態】
【0010】
以下、本発明の好適な実施形態について図面を用いて詳細に説明する。なお、以下に説明する実施の形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また以下で説明される構成の全てが本発明の必須構成要件であるとは限らない。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
メジャー文具
3日前
日本精機株式会社
位置検出装置
9日前
日本精機株式会社
位置検出装置
9日前
ユニパルス株式会社
ロードセル
2日前
日本精機株式会社
位置検出装置
9日前
大和製衡株式会社
組合せ秤
14日前
大和製衡株式会社
組合せ秤
14日前
アズビル株式会社
圧力センサ
8日前
株式会社ヨコオ
ソケット
1日前
株式会社ユーシン
操作検出装置
11日前
トヨタ自動車株式会社
表示装置
23日前
エイブリック株式会社
磁気センサ回路
8日前
株式会社ヨコオ
ソケット
2日前
株式会社チノー
放射光測温装置
2日前
株式会社東芝
センサ
14日前
株式会社東芝
センサ
14日前
トヨタ自動車株式会社
検査装置
11日前
ダイキン工業株式会社
監視装置
今日
トヨタ自動車株式会社
監視装置
1日前
東レエンジニアリング株式会社
計量装置
11日前
株式会社東芝
重量測定装置
7日前
TDK株式会社
磁気センサ
1日前
株式会社ナリス化粧品
角層細胞採取用具
21日前
TDK株式会社
ガスセンサ
2日前
TDK株式会社
ガスセンサ
8日前
TDK株式会社
ガスセンサ
7日前
個人
粘塑性を用いた有限要素法の定式化
23日前
三菱マテリアル株式会社
温度センサ
21日前
三菱マテリアル株式会社
温度センサ
21日前
TDK株式会社
磁気計測装置
22日前
中国電力株式会社
電柱管理システム
今日
成田空港給油施設株式会社
保持治具
22日前
富士電機株式会社
エンコーダ
8日前
日本特殊陶業株式会社
センサ
今日
日本特殊陶業株式会社
センサ
今日
日本特殊陶業株式会社
センサ
今日
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ