TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147404
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024047639
出願日
2024-03-25
発明の名称
把持検知システム
出願人
豊田合成株式会社
代理人
弁理士法人明成国際特許事務所
主分類
B62D
1/04 20060101AFI20250930BHJP(鉄道以外の路面車両)
要約
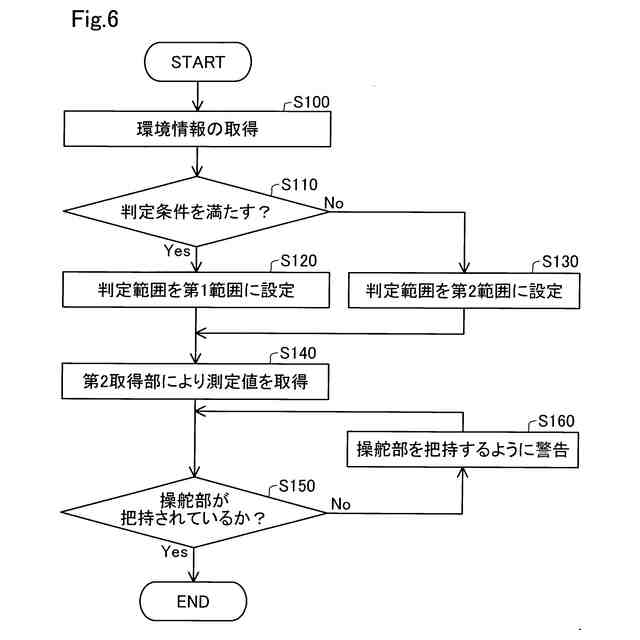
【課題】高度運転支援システムの作動中において、運転者が車両の環境情報によって、把持を要求されることに煩わしさを感じない把持検知システムを提供する。
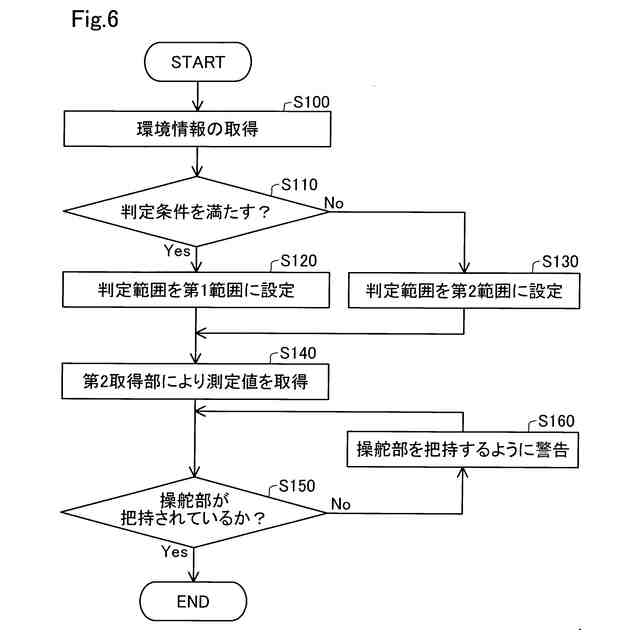
【解決手段】把持検知システムは、移動体の運転者に把持される把持部を有する操舵部と、移動体の使用される環境に係わる環境情報を取得する第1取得部と、出力部と、制御部と、を備え、操舵部は、運転者の手の動作に応じた測定値を取得する第2取得部を備え、制御部は、予め定められた判定時間以内に、測定値が、予め定められた判定範囲に含まれなかった場合、操舵部が把持されていないことを表す出力を出力部に行わせ、環境情報に応じて、判定範囲を、第1範囲、または、第1範囲よりも把持の判定が緩和される第2範囲に設定する範囲設定制御と、判定時間を、第1時間、または、第1時間よりも長い第2時間に設定する時間設定制御と、の少なくとも一方の制御を実行する。
【選択図】図6
特許請求の範囲
【請求項1】
把持検知システムであって、
移動体のステアリング装置に設けられ、前記移動体の運転者に把持される把持部を有する操舵部と、
前記移動体の使用される環境に係わる環境情報を取得する第1取得部と、
情報を出力する出力部と、
制御部と、を備え、
前記操舵部は、前記運転者の手の動作に応じた測定値を取得する第2取得部を備え、
前記制御部は、
予め定められた判定時間以内に、前記測定値が、予め定められた判定範囲に含まれなかった場合、前記操舵部が把持されていないことを表す出力を前記出力部に行わせ、
前記環境情報に応じて、
前記判定範囲を、第1範囲、または、前記第1範囲よりも前記把持の判定が緩和される第2範囲に設定する範囲設定制御と、
前記判定時間を、第1時間、または、前記第1時間よりも長い第2時間に設定する時間設定制御と、の少なくとも一方の制御を実行する、把持検知システム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1記載の把持検知システムであって、
前記移動体は、車両であり、
前記第1取得部は、前記車両の前後の少なくとも一方における他車両の数を前記環境情報として取得し、
前記制御部は、前記第1取得部により、
前記他車両の数が予め定められた基準車両数よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、
前記他車両の数が前記基準車両数よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行する、把持検知システム。
【請求項3】
請求項1記載の把持検知システムであって、
前記移動体は、車両であり、
前記第1取得部は、前記車両の周囲における車線の数を前記環境情報として取得し、
前記制御部は、
前記車線の数が予め定められた基準車線数よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、
前記車線の数が前記基準車線数よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行する、把持検知システム。
【請求項4】
請求項1記載の把持検知システムであって、さらに、
前記移動体の速度を測定する速度取得部を備え、
前記移動体は、車両であり、
前記第1取得部は、前記車両の前後の少なくとも一方における最も近い他車両との車間距離を前記環境情報として取得し、
前記制御部は、
前記第1取得部により、前記車間距離が前記速度に応じて予め定められた基準車間距離よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、
前記第1取得部により、前記車間距離が前記基準車間距離よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行する、把持検知システム。
【請求項5】
請求項1記載の把持検知システムであって、
前記移動体は、車両であり、
前記第1取得部は、前記車両の使用環境の天候を表す情報を前記環境情報として取得し、
前記制御部は、
前記車両の制動距離を大きくするまたは前記運転者の視界を妨げる予め定められた第1天候条件を満たす前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、
前記第1天候条件を満たさない前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行する、把持検知システム。
【請求項6】
請求項1記載の把持検知システムであって、
前記移動体は、車両であり、
前記第1取得部は、前記車両の周囲の照度を前記環境情報として取得し、
前記制御部は、
前記照度が予め定められた基準照度よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、
前記照度が前記基準照度よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行する、把持検知システム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、把持検知システムに関する。
続きを表示(約 4,100 文字)
【背景技術】
【0002】
車両のハンドルにおいて、例えば、特許文献1に記載されているように、運転者がハンドルを把持しているか否かを検出する把持検知システムが存在する。把持検知システムは、例えば、LTA(Lane Tracing Assist:車線逸脱防止支援システム)やLCA(Lane Change Assist:車線変更支援システム)を含む高度運転支援システムの作動中に、運転者にハンドルの把持を要求させるために用いられる。LCAは、車線変更を行う条件として、運転者によるハンドルの把持を条件にする場合がある。運転者がハンドルを把持していれば、高度運転支援システムによる車線の変更中に、他車両が接近するような不測の事態が生じた場合でも、運転者が対応できる。
【先行技術文献】
【特許文献】
【0003】
特開2022-148335号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、例えば、周囲に車両が少ない場合、運転者の操舵が必要になる不測の事態は生じにくい。よって、高度運転支援システムの作動中において、運転者が車両の環境に拘わらず同程度の把持を要求されることに煩わしさを感じる虞があった。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の一形態によれば、把持検知システムが提供される。前記把持検知システムは、移動体のステアリング装置に設けられ、前記移動体の運転者に把持される把持部を有する操舵部と、前記移動体の使用される環境に係わる環境情報を取得する第1取得部と、情報を出力する出力部と、制御部と、を備え、前記操舵部は、前記運転者の手の動作に応じた測定値を取得する第2取得部を備え、前記制御部は、予め定められた判定時間以内に、前記測定値が、予め定められた判定範囲に含まれなかった場合、前記操舵部が把持されていないことを表す出力を前記出力部に行わせ、前記環境情報に応じて、前記判定範囲を、第1範囲、または、前記第1範囲よりも前記把持の判定が緩和される第2範囲に設定する範囲設定制御と、前記判定時間を、第1時間、または、前記第1時間よりも長い第2時間に設定する時間設定制御と、の少なくとも一方の制御を実行する。
このような形態とすることで、本開示の把持検知システムは、環境情報に応じて、操舵部の把持の判定を緩和する。または、本開示の把持検知システムは、環境情報に応じて、判定時間を長くすることにより、操舵部が把持されていないことを表す出力の間隔を遅くする。本開示の把持検知システムがこれらの少なくとも一方の制御をすることにより、環境情報によっては、運転者は、把持を要求されにくくなる。よって、本開示の把持検知システムは、把持を要求されにくくなるため、運転者の感じる煩わしさを低減できる。
(2)上記形態において、前記移動体は、車両であり、前記第1取得部は、前記車両の前後の少なくとも一方における他車両の数を前記環境情報として取得し、前記制御部は、前記第1取得部により、前記他車両の数が予め定められた基準車両数よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、前記他車両の数が前記基準車両数よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行してもよい。
このような形態とすることで、本開示の把持検知システムは、他車両の数に応じて、運転者の感じる煩わしさを低減できる。
(3)上記形態において、前記移動体は、車両であり、前記第1取得部は、前記車両の周囲における車線の数を前記環境情報として取得し、前記制御部は、前記車線の数が予め定められた基準車線数よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、前記車線の数が前記基準車線数よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行してもよい。
このような形態とすることで、本開示の把持検知システムは、車線の数に応じて、運転者の感じる煩わしさを低減できる。
(4)上記形態において、前記移動体の速度を測定する速度取得部を備え、前記移動体は、車両であり、前記第1取得部は、前記車両の前後の少なくとも一方における最も近い他車両との車間距離を前記環境情報として取得し、前記制御部は、前記第1取得部により、前記車間距離が前記速度に応じて予め定められた基準車間距離よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、前記第1取得部により、前記車間距離が前記基準車間距離よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行してもよい。
このような形態とすることで、本開示の把持検知システムは、車間距離に応じて、運転者の感じる煩わしさを低減できる。
(5)上記形態において、前記移動体は、車両であり、前記第1取得部は、前記車両の使用環境の天候を表す情報を前記環境情報として取得し、前記制御部は、前記車両の制動距離を大きくするまたは前記運転者の視界を妨げる予め定められた第1天候条件を満たす前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、前記第1天候条件を満たさない前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行してもよい。
このような形態とすることで、本開示の把持検知システムは、天候に応じて、運転者の感じる煩わしさを低減できる。
(6)上記形態において、前記移動体は、車両であり、前記第1取得部は、前記車両の周囲の照度を前記環境情報として取得し、前記制御部は、前記照度が予め定められた基準照度よりも小さいことを表す前記環境情報を取得した場合、前記判定範囲を前記第1範囲に設定する制御と、前記判定時間を前記第1時間に設定する制御と、の少なくとも一方の制御を実行し、前記照度が前記基準照度よりも大きいことを表す前記環境情報を取得した場合、前記判定範囲を前記第2範囲に設定する制御と、前記判定時間を前記第2時間に設定する制御と、の少なくとも一方の制御を実行してもよい。
このような形態とすることで、把持検知システムは、車両の周囲の照度に応じて、運転者の感じる煩わしさを低減できる。
【図面の簡単な説明】
【0007】
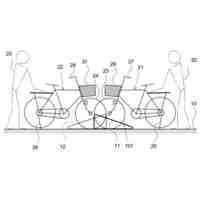
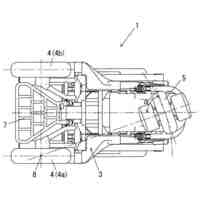
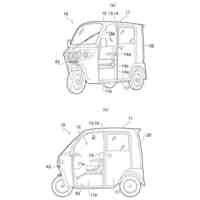
第1実施形態の把持検知システムを示す説明図である。
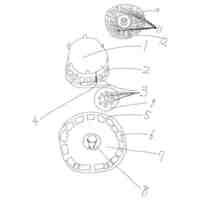
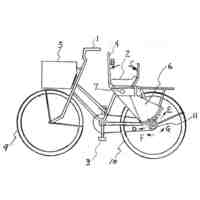
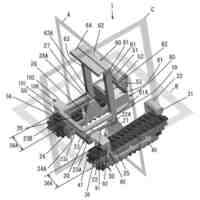
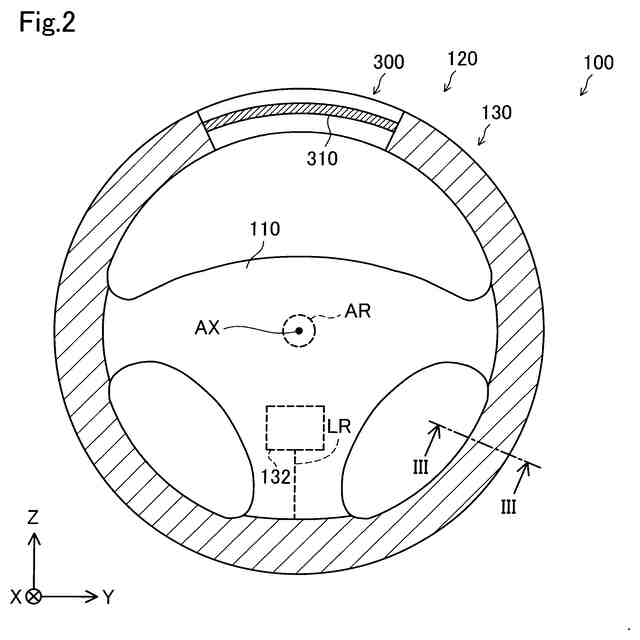
操舵部を示す説明図である。
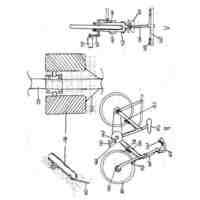
図2のIII-III断面図である。
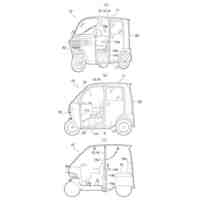
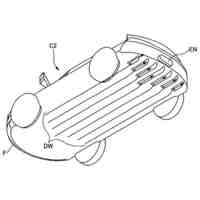
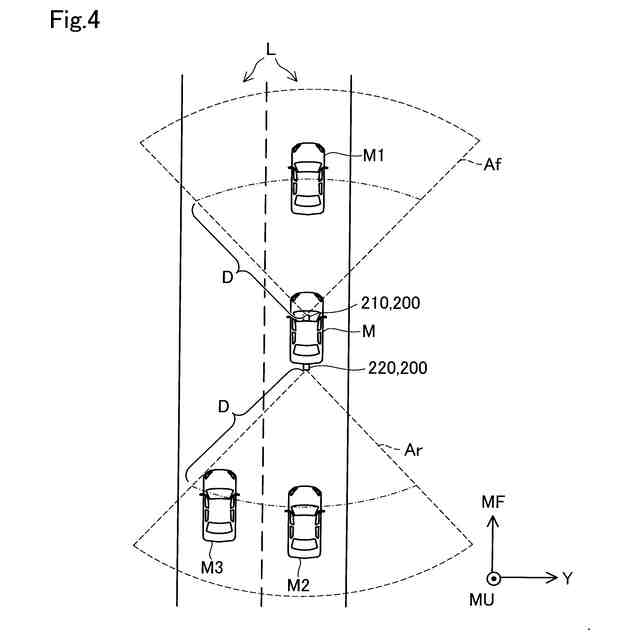
第1実施形態の第1取得部により視認可能な範囲を示す説明図である。
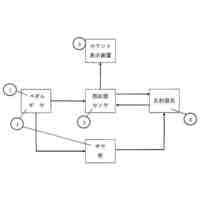
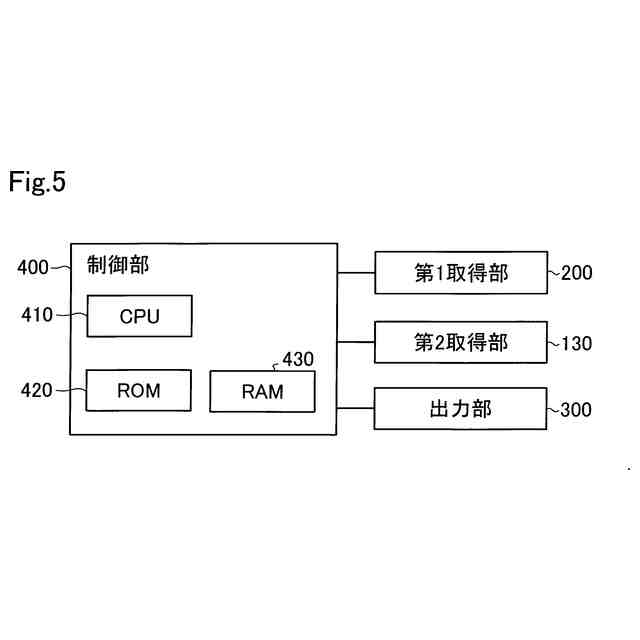
制御部の構成を表すブロック図である。
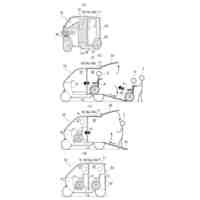
第1実施形態の把持検知システムの制御方法を示すフローチャートである。
第2実施形態の把持検知システムの制御方法を示すフローチャートである。
【発明を実施するための形態】
【0008】
A.第1実施形態:
A-1.システムの構成:
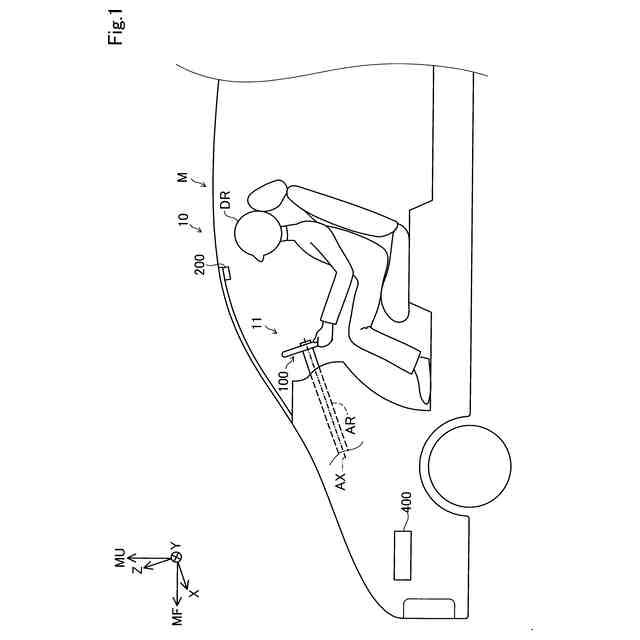
図1は、本実施形態の把持検知システム10を示す説明図である。把持検知システム10は、例えば、LTA(Lane Tracing Assist:車線逸脱防止支援システム)やLCA(Lane Change Assist:車線変更支援システム)を含む高度運転支援システムを備えている車両Mに設けられる。高度運転支援システムについては、後に説明する。
【0009】
図1において、車両Mのステアリング装置11が簡略化されて表されている。ステアリング装置11に設けられている操舵部100は、車両Mの乗員である運転者DRによって操作される。ステアリング装置11は、車両Mの回転軸ARと連結され、回転軸ARの軸線AXを中心に回転操作が可能に構成されている。ステアリング装置11の回転は、回転軸ARを介して、図示していないステアリングギヤボックスに伝達される。回転軸ARの軸線AXに沿った方向を、図1ではX方向と表記する。運転者DRから離れる方向を、+X方向と表記する。軸線AXに直交する方向のうち、車両Mの左右方向に沿った方向を、Y方向と表記する。車両Mの右方向に向かう方向に沿った方向を+Y方向、左方向に向かう方向に沿った方向を-Y方向と表記する。軸線AXおよびY方向に直交する方向をZ方向と表記する。また、図1において、鉛直方向の向きがMU軸で表されている。鉛直方向の上向きが、MU軸の正方向である。車両Mの進行方向の向きは、MU軸に直交する軸であり、MF軸で表されている。すなわち、MF軸に平行な方向において、正方向が車両Mの前方であり、負方向が車両Mの後方である。なお、「車両M」を、「自車両M」とも呼ぶ。
【0010】
把持検知システム10は、操舵部100と、第1取得部200と、出力部300と、制御部400と、を備えている。出力部300は、図2に図示されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
カート
5か月前
個人
走行装置
5か月前
個人
三輪バイク
1か月前
個人
台車
17日前
個人
乗り物
7か月前
個人
電動走行車両
5か月前
個人
閂式ハンドル錠
5か月前
個人
電動モビリティ
9か月前
個人
駐輪設備
3か月前
個人
自転車用歩数計
1か月前
個人
発音装置
9か月前
個人
ボギー・フレーム
3か月前
個人
“zen-go.”
4か月前
個人
ルーフ付きトライク
4か月前
個人
三輪電動車両
1か月前
個人
ルーフ付きトライク
3か月前
個人
自由方向乗車自転車
9か月前
個人
車の室内高温防止屋根
1か月前
個人
パワーアシスト自転車
3か月前
井関農機株式会社
作業車両
1か月前
個人
キャンピングトライク
10か月前
個人
ステアリングの操向部材
10か月前
個人
電動式ルーフ付きトライク
9日前
個人
電動式ルーフ付きトライク
9日前
個人
フロントフットブレーキ。
5か月前
個人
電動式ルーフ付きトライク
9日前
井関農機株式会社
収穫作業車両
3日前
株式会社豊田自動織機
産業車両
6か月前
個人
乗用自動車のディフューザー
2か月前
豊田鉄工株式会社
小型車両
5か月前
個人
ホイールハブ駆動構造
6か月前
学校法人千葉工業大学
車両
11か月前
学校法人千葉工業大学
車両
11か月前
学校法人千葉工業大学
車両
11か月前
ヤマハ発動機株式会社
自転車
5か月前
船井電機株式会社
車両
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ