TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146143
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046771
出願日
2024-03-22
発明の名称
ロボット制御装置、ロボット、ロボットの制御方法及びプログラム
出願人
カシオ計算機株式会社
代理人
弁理士法人光陽国際特許事務所
主分類
A63H
11/00 20060101AFI20250926BHJP(スポーツ;ゲーム;娯楽)
要約
【課題】ロボットによる不自然な動作の実行を抑制する。
【解決手段】ロボット制御装置は、外部からの刺激を検出するセンサを備えたロボットを制御するロボット制御装置であって、所定の方法でロボットの状態を判別し、ロボットが所定の状態であり、かつ刺激がセンサにより検出された場合には、刺激に応じた反応動作をロボットに行わせ、ロボットが所定の状態でない場合、かつ所定条件を満たす刺激がセンサにより検出された場合には、刺激に応じた反応動作をロボットに行わせない、制御部を備える。
【選択図】図7
特許請求の範囲
【請求項1】
外部からの刺激を検出するセンサを備えたロボットを制御するロボット制御装置であって、
所定の方法で前記ロボットの状態を判別し、
前記ロボットが所定の状態であり、かつ前記刺激が前記センサにより検出された場合には、前記刺激に応じた反応動作を前記ロボットに行わせ、
前記ロボットが前記所定の状態でない場合、かつ所定条件を満たす前記刺激が前記センサにより検出された場合には、前記刺激に応じた前記反応動作を前記ロボットに行わせない、
制御部を備えるロボット制御装置。
続きを表示(約 1,300 文字)
【請求項2】
前記制御部は、前記刺激の強度が所定の基準範囲内である場合に、前記刺激が前記所定条件を満たすと判別する、
請求項1に記載のロボット制御装置。
【請求項3】
前記刺激は音であり、
前記基準範囲は、前記音の音量の基準範囲であり、
前記基準範囲は、前記音がユーザの前記ロボットに対する話し掛け音声である場合の音量を包含するように定められている、
請求項2に記載のロボット制御装置。
【請求項4】
前記制御部は、前記ロボットが前記所定の状態でない場合、かつ前記所定条件を満たさない前記刺激が前記センサにより検出された場合には、前記刺激に応じた前記反応動作を前記ロボットに行わせる、
請求項1~3のいずれか一項に記載のロボット制御装置。
【請求項5】
前記制御部は、
前記ロボットが所定の格納部の外部に出されている場合に、前記ロボットが前記所定の状態であると判別し、
前記ロボットが前記格納部に格納されている場合に、前記ロボットが前記所定の状態でないと判別する、
請求項1に記載のロボット制御装置。
【請求項6】
前記格納部は、前記ロボットが格納されている場合に前記ロボットの少なくとも一部と接触し得る形状を有する、
請求項5に記載のロボット制御装置。
【請求項7】
前記格納部は、前記ロボットに設けられたバッテリを充電するための給電器である、
請求項5に記載のロボット制御装置。
【請求項8】
前記刺激は音であり、
前記制御部は、
前記音の音量が所定の基準範囲内である場合に、前記音が前記所定条件を満たすと判別し、
前記所定の状態でない場合において、前記反応動作とは異なる自発的な動作を前記ロボットに行わせ、
前記基準範囲は、前記所定の状態でない場合において前記ロボットが前記自発的な動作を行うことによる前記格納部と前記ロボットとの接触により生じる前記音の前記音量を包含するように定められている、
請求項6に記載のロボット制御装置。
【請求項9】
前記刺激は音であり、
前記制御部は、
前記所定の状態でない場合において、前記反応動作とは異なる自発的な動作を前記ロボットに行わせ、
前記自発的な動作と同期したタイミングで前記音が検出された場合に、前記音が前記所定条件を満たすと判別する、
請求項6に記載のロボット制御装置。
【請求項10】
前記刺激は、前記ロボットに対する接触であり、
前記制御部は、
前記接触の強度が所定の基準範囲内である場合に、前記接触が前記所定条件を満たすと判別し、
前記所定の状態でない場合において、前記反応動作とは異なる自発的な動作を前記ロボットに行わせ、
前記基準範囲は、前記所定の状態でない場合において前記ロボットが前記自発的な動作を行うことによる前記格納部と前記ロボットとの接触の強度を包含するように定められている、
請求項6に記載のロボット制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御装置、ロボット、ロボットの制御方法及びプログラムに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ユーザの呼び掛け等の外部からの刺激に応じて所定の反応動作をロボットに行わせる技術が知られている(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2003-326479号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、外部からの刺激に応じて一律に反応動作を行わせると、ロボットが置かれている状況によっては不自然な動作になってしまう場合がある。
【0005】
本発明は、ロボットによる不自然な動作の実行を抑制することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係るロボット制御装置は、外部からの刺激を検出するセンサを備えたロボットを制御するロボット制御装置であって、所定の方法で前記ロボットの状態を判別し、前記ロボットが所定の状態であり、かつ前記刺激が前記センサにより検出された場合には、前記刺激に応じた反応動作を前記ロボットに行わせ、前記ロボットが前記所定の状態でない場合、かつ所定条件を満たす前記刺激が前記センサにより検出された場合には、前記刺激に応じた前記反応動作を前記ロボットに行わせない、制御部を備える。
【発明の効果】
【0007】
本発明によれば、ロボットによる不自然な動作の実行を抑制することができる。
【図面の簡単な説明】
【0008】
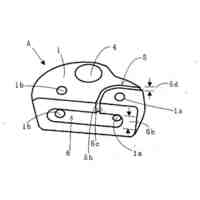
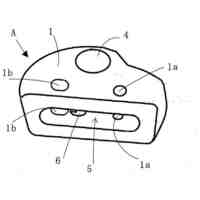
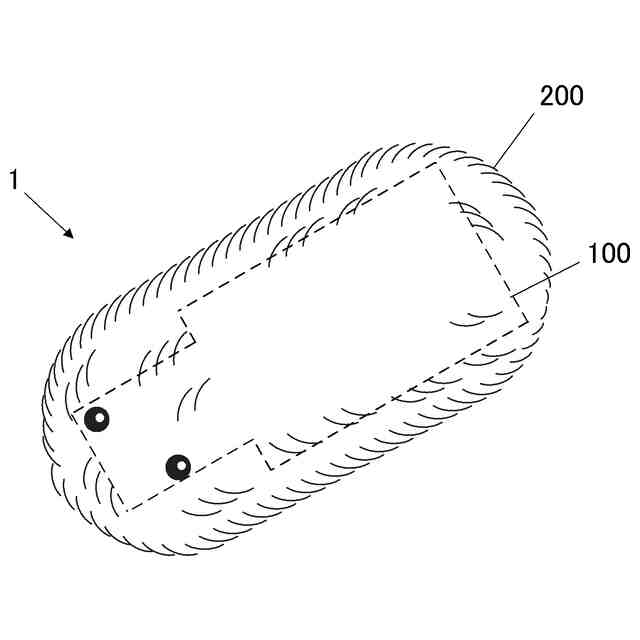
ロボットの外観を示す図である。
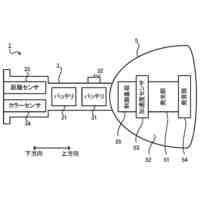
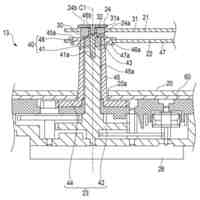
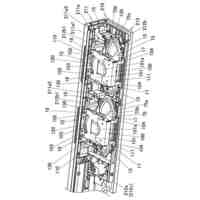
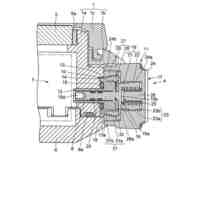
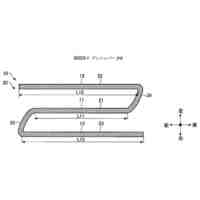
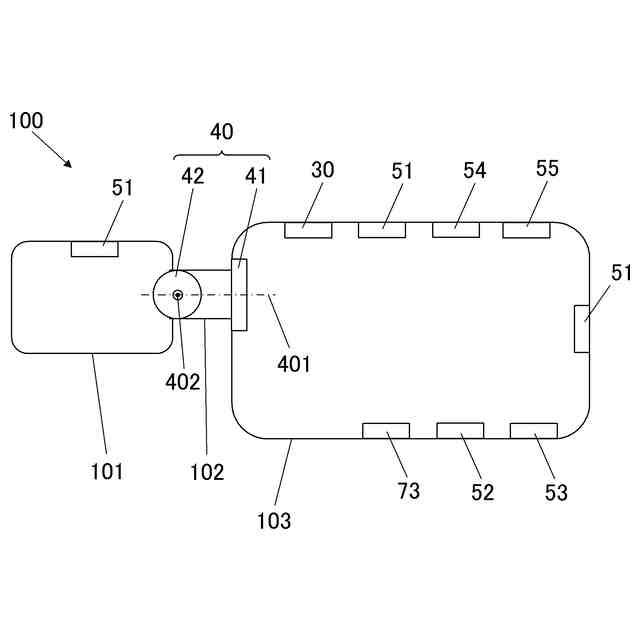
ロボットの本体の構成を示す模式図である。
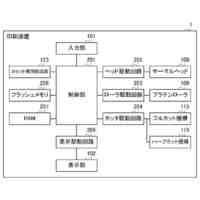
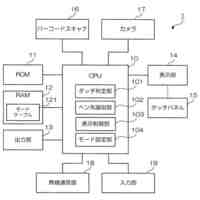
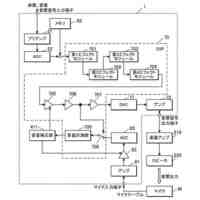
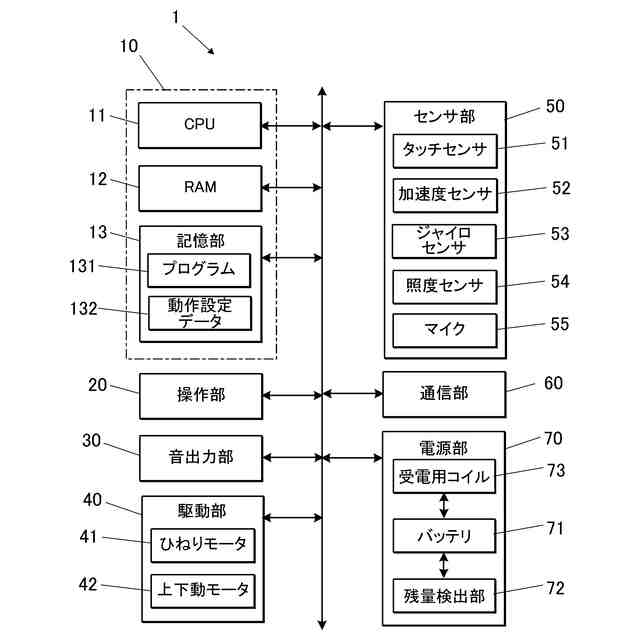
ロボットの機能構成を示すブロック図である。
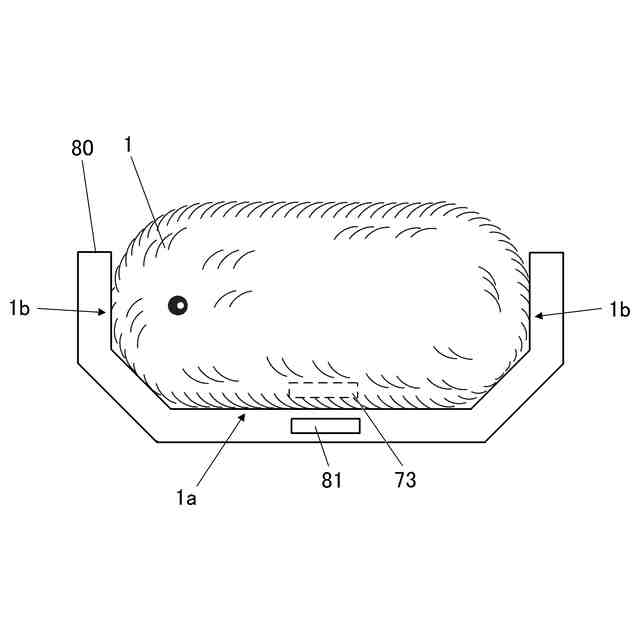
給電器に格納されて充電中のロボットを示す模式断面図である。
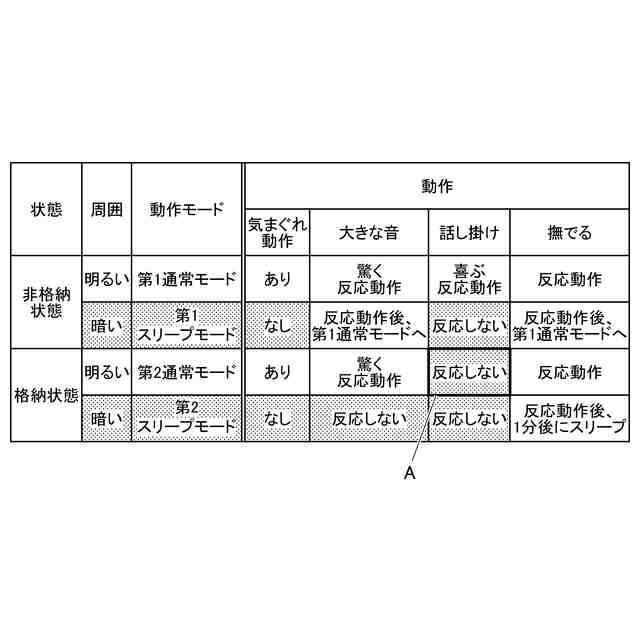
各動作モードにおけるロボットの動作の概要を示す図である。
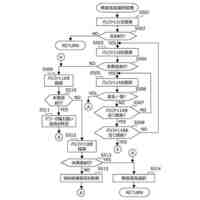
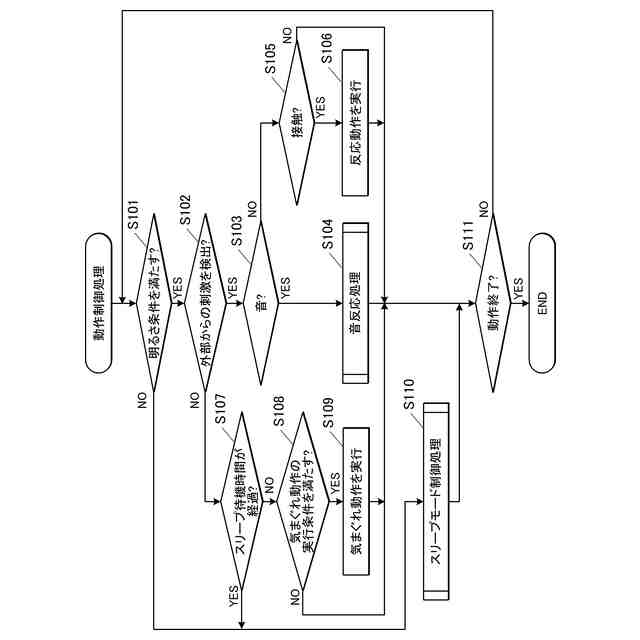
動作制御処理の制御手順を示すフローチャートである。
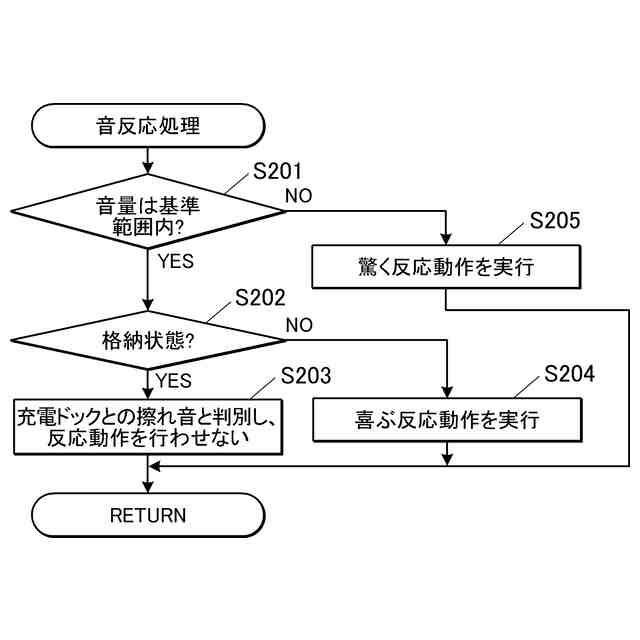
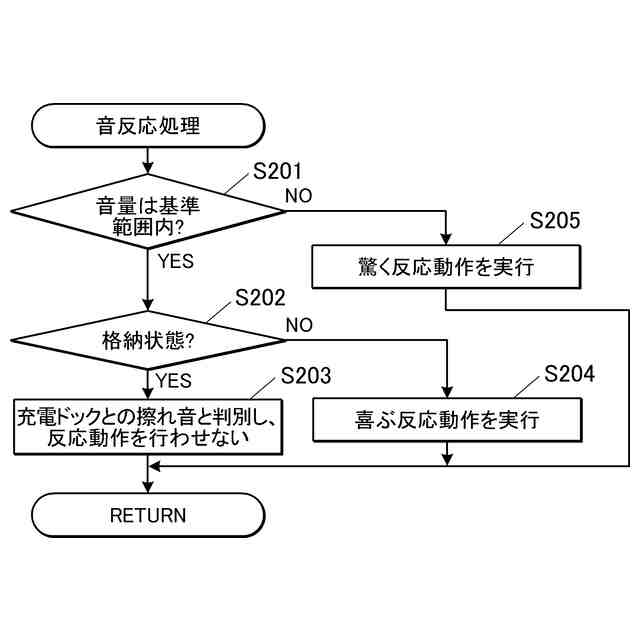
音反応処理の制御手順を示すフローチャートである。
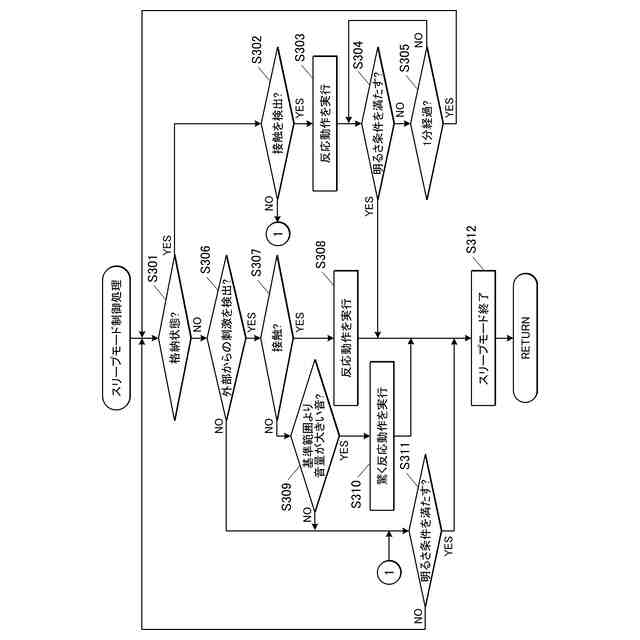
スリープモード制御処理の制御手順を示すフローチャートである。
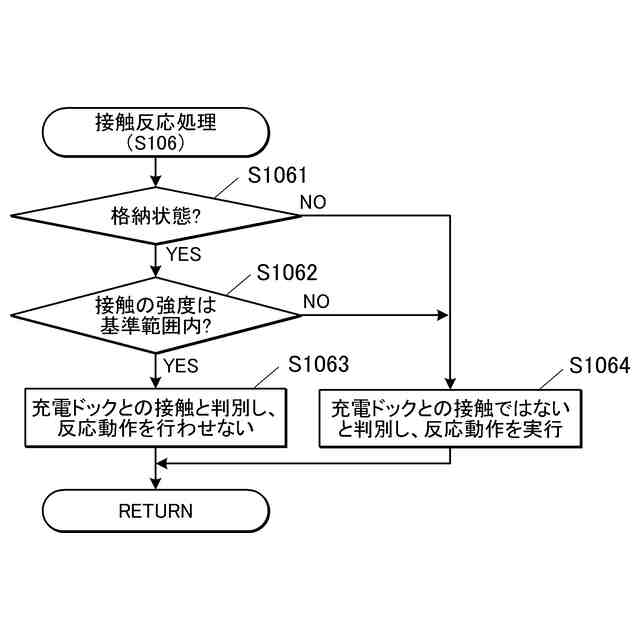
変形例1に係る接触反応処理の制御手順を示すフローチャートである。
変形例2に係る音反応処理の制御手順を示すフローチャートである。
変形例3に係る接触反応処理の制御手順を示すフローチャートである。
変形例4に係る動作制御処理の他の制御手順を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の実施の形態を図面に基づいて説明する。図1に示すように、ロボット1は、本体100と、本体100を覆う外装200と、を備える。ロボット1は、小型の生き物を模したペットロボットである。ロボット1は、生き物の仕草を模した互いに異なる複数の動作を行うことができる。外装200は、本体100の動きに追従して変形する。外装200は、パイル織物により形成された毛皮や、目を模した装飾部材等を有する。
【0010】
図2に示すように、ロボット1の本体100は、頭部101と、胴体部103と、頭部101及び胴体部103を連結する連結部102と、を有する。以下では、ロボット1のうち頭部101に相当する部分を「首」と記す。本体100は、頭部101を胴体部103に対して動かすための駆動部40を有する。駆動部40は、ひねりモータ41及び上下動モータ42を有する。ひねりモータ41は、頭部101及び連結部102を、連結部102の延在方向に延びる第1回転軸401を中心に所定の角度範囲内で回転させるサーボモータである。ひねりモータ41の動作により、ロボット1が首をひねる動きが実現される。上下動モータ42は、第1回転軸401に垂直な第2回転軸402を中心に頭部101を所定の角度範囲内で回転させるサーボモータである。上下動モータ42により、ロボット1が首を上下させる動きが実現される。首の上下動の方向は、ひねりモータ41による首のひねりの角度により、鉛直方向に対して傾斜した方向にもなり得る。ひねりモータ41及び/又は上下動モータ42を細かく周期的に動作させることで、ロボット1が首を揺動させたり震えたりする動きが実現される。ひねりモータ41及び上下動モータ42の動作のタイミング、大きさ、及び速さを適宜変更して組み合わせることにより、ロボット1に多様な動作、例えば、喜ぶ動作、驚く動作、生き物の呼吸を模した呼吸動作(自発的な動作)等を行わせることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カシオ計算機株式会社
印刷装置
14日前
カシオ計算機株式会社
電子装置
22日前
カシオ計算機株式会社
光源装置及び投影装置
9日前
カシオ計算機株式会社
報知システム及び報知方法
24日前
カシオ計算機株式会社
調整装置、方法及びプログラム
22日前
カシオ計算機株式会社
イヤホンデバイス、電子システム
今日
カシオ計算機株式会社
発音装置、発音方法及びプログラム
24日前
カシオ計算機株式会社
情報処理装置、方法およびプログラム
24日前
カシオ計算機株式会社
電子機器、通知制御方法及びプログラム
23日前
カシオ計算機株式会社
検索装置、検索方法、及び、プログラム
14日前
カシオ計算機株式会社
印刷装置、ラベル作成方法及びプログラム
14日前
カシオ計算機株式会社
電子機器、入力制御方法、及びプログラム
11日前
カシオ計算機株式会社
軌跡生成方法、軌跡生成装置及びプログラム
24日前
カシオ計算機株式会社
情報処理装置、情報処理方法及びプログラム
24日前
カシオ計算機株式会社
情報処理方法、プログラム及び情報処理装置
1か月前
カシオ計算機株式会社
活動支援方法、プログラム及び活動支援装置
1か月前
カシオ計算機株式会社
人材管理装置、人材管理方法、及びプログラム
24日前
カシオ計算機株式会社
情報処理装置、情報処理方法、及びプログラム
3日前
カシオ計算機株式会社
情報処理装置、印刷装置、方法およびプログラム
24日前
カシオ計算機株式会社
ウェアラブル機器、装着判定方法及びプログラム
3日前
カシオ計算機株式会社
情報処理装置、演奏装置、方法およびプログラム
23日前
カシオ計算機株式会社
電子機器、電源供給状態表示方法およびプログラム
21日前
カシオ計算機株式会社
時計
今日
カシオ計算機株式会社
電子鍵盤楽器
2日前
カシオ計算機株式会社
売上データ処理システム、売上データ処理方法、及びプログラム
8日前
カシオ計算機株式会社
バンド駒の製造方法
今日
カシオ計算機株式会社
カバー付き電子機器
14日前
カシオ計算機株式会社
スイッチ装置および時計
24日前
カシオ計算機株式会社
スタンド、鍵盤楽器セット
21日前
カシオ計算機株式会社
情報処理装置、情報制御方法、及び、プログラム
10日前
カシオ計算機株式会社
音量制御装置、電子楽器、音量制御方法及びプログラム
21日前
個人
玩具
4か月前
個人
玩具
1か月前
個人
自走玩具
1か月前
個人
運動補助具
3か月前
個人
小型卓球台
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ