TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025146090
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024046692
出願日
2024-03-22
発明の名称
ステアリング装置、移動体、ウェアラブルデバイス、運転支援システム、および、運転支援方法
出願人
豊田合成株式会社
代理人
弁理士法人明成国際特許事務所
主分類
G08G
1/16 20060101AFI20250926BHJP(信号)
要約
【課題】移動体の運転者がステアリング本体を把持しているか否かを精度よく判定できる技術を提供する。
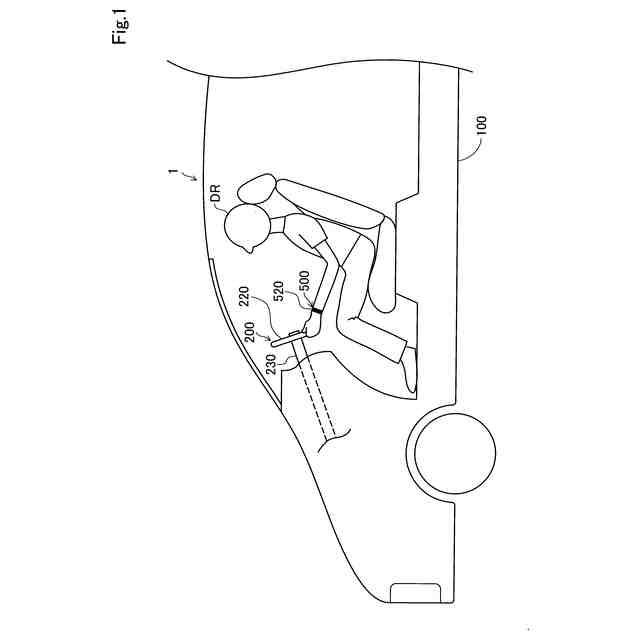
【解決手段】移動体に設けられるステアリング装置は、移動体の運転者が把持するためのステアリング本体と、ステアリング本体と運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離情報を取得するセンサと、距離情報を用いて、運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、運転者がステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える。
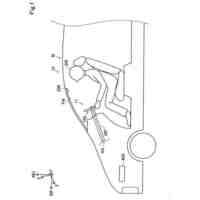
【選択図】図1
特許請求の範囲
【請求項1】
移動体に設けられるステアリング装置であって、
前記移動体の運転者が把持するためのステアリング本体と、
前記ステアリング本体と前記運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離情報を取得するセンサと、
前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、
前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える、ステアリング装置。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載のステアリング装置であって、
前記センサは、前記ステアリング装置と前記ウェアラブルデバイスとの無線通信を利用して、前記距離情報を取得する、ステアリング装置。
【請求項3】
請求項2に記載のステアリング装置であって、
前記センサは、
前記ステアリング本体と前記デバイス本体とが予め定められた距離範囲内に存在する場合に、前記ウェアラブルデバイスのデバイス通信部と赤外線によって無線通信可能なステアリング通信部と、
前記ステアリング通信部と前記デバイス通信部とが赤外線によって無線通信できたか否かを示す第1情報を前記距離情報として取得する取得部と、を備え、
前記判定部は、
前記第1情報が、前記ステアリング通信部と前記デバイス通信部とが赤外線によって無線通信できたことを示す情報である場合に、前記運転者が前記ステアリング本体を把持していると判定し、
前記第1情報が、前記ステアリング通信部と前記デバイス通信部とが赤外線によって無線通信できなかったことを示す情報である場合に、前記運転者が前記ステアリング本体を把持していないと判定する、ステアリング装置。
【請求項4】
請求項1に記載のステアリング装置であって、
前記センサは、
前記ステアリング本体と前記デバイス本体との距離を測定する測距部と、
前記測距部によって測定された前記ステアリング本体と前記デバイス本体との前記距離を示す第2情報を前記距離情報として取得する取得部と、を備え、
前記判定部は、
前記第2情報によって特定される前記ステアリング本体と前記デバイス本体との前記距離が予め定められた範囲内である場合に、前記運転者が前記ステアリング本体を把持していると判定し、
前記第2情報によって特定される前記ステアリング本体と前記デバイス本体との前記距離が前記予め定められた範囲から外れる場合に、前記運転者が前記ステアリング本体を把持していないと判定する、ステアリング装置。
【請求項5】
請求項1から請求項4までのいずれか一項に記載のステアリング装置であって、
前記センサは、前記ステアリング本体の全体に亘って配置されている、ステアリング装置。
【請求項6】
請求項1から請求項4までのいずれか一項に記載のステアリング装置であって、
前記センサは、前記ステアリング本体の一部に配置されている、ステアリング装置。
【請求項7】
移動体であって、
前記移動体の運転者が把持するためのステアリング本体と、前記ステアリング本体と前記運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離情報を取得するセンサと、を備えるステアリング装置と、
前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、
前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える、移動体。
【請求項8】
請求項7に記載の移動体であって、さらに、
前記ウェアラブルデバイスのデバイス通信部と電磁波によって無線通信可能な移動体通信部と、
前記ウェアラブルデバイスを識別可能なデバイス識別情報を含むデバイス識別信号を前記ウェアラブルデバイスから受信した場合に、前記デバイス識別信号に含まれる前記デバイス識別情報と、前記移動体を識別可能な移動体識別情報と、を照合する照合部と、
前記デバイス識別情報と前記移動体識別情報とが一致する場合に、前記移動体に予め定められた動作を実行させる実行部と、を備える、移動体。
【請求項9】
請求項7に記載の移動体であって、さらに、
前記ウェアラブルデバイスのデバイス通信部と電磁波によって無線通信可能な移動体通信部と、
前記移動体を識別可能な移動体識別情報を含む移動体識別信号を前記ウェアラブルデバイスに送信する移動体側送信部と、
前記ウェアラブルデバイスを識別可能なデバイス識別情報と前記移動体識別信号に含まれる前記移動体識別情報とが一致する場合に前記ウェアラブルデバイスにおいて生成される許可信号を前記ウェアラブルデバイスから受信した場合に、前記移動体に予め定められた動作を実行させる実行部と、を備える、移動体。
【請求項10】
ウェアラブルデバイスであって、
移動体の運転者の手腕に装着可能なデバイス本体と、
前記運転者が把持するためのステアリング本体と前記デバイス本体との距離情報を取得するセンサと、
前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、
前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える、ウェアラブルデバイス。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ステアリング装置、移動体、ウェアラブルデバイス、運転支援システム、および、運転支援方法に関する。
続きを表示(約 8,800 文字)
【背景技術】
【0002】
従来、運転者が前腕、手首または指に着用するウェアラブルデバイスを用いて、運転者がハンドルを把持していない手放し状態か否かを判定し、手放し状態と判定した場合に、ウェアラブルデバイスから警告を出力させる運転支援装置が知られている(特許文献1)。この技術では、ウェアラブルデバイスは、ウェアラブルデバイスの位置および姿勢の少なくとも1つを検知可能なセンサとして、傾斜センサ、加速度センサ、および、角速度センサを備える。運転支援装置は、運転者がハンドルを把持した状態でのセンサの測定結果を初期値として取得し、その後連続してセンサから値を取得し、取得した値と初期値とに基づいて、運転者がハンドルを把持しているか否かを判定する。具体的には、運転支援装置は、3つの直交軸に対する傾斜角を検出可能な傾斜センサの測定結果に基づいて、3つの傾斜角のうちの少なくとも1つが初期値を含む所定範囲内にない場合に、運転者がハンドルを把持していないと判定する。また、運転支援装置は、加速度センサの測定結果に基づいてウェアラブルデバイスの移動距離を検知し、角速度センサの測定結果に基づいてウェアラブルデバイスの移動方向を検知することで、現時点におけるウェアラブルデバイスの位置を求める。そして、運転支援装置は、求められたウェアラブルデバイスの位置が、所定の閾値以上離れている場合に、運転者がハンドルを把持していないと判定する。
【先行技術文献】
【特許文献】
【0003】
特開2022-156944号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
従来の技術では、運転者がハンドルを把持しているときのウェアラブルデバイスの位置と、センサによって検出したときのウェアラブルデバイスの位置と、の位置変化に応じて、運転者がハンドルを把持しているか否かを判定している。そのため、運転者がハンドルを把持しているか否かの判定精度が低下する場合がある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
(1)本開示の第1形態によれば、ステアリング装置が提供される。移動体に設けられるステアリング装置は、前記移動体の運転者が把持するためのステアリング本体と、前記ステアリング本体と前記運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離情報を取得するセンサと、前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える。この形態によれば、ステアリング装置は、ステアリング装置のステアリング本体と運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離に応じて、運転者がステアリング本体を把持しているか否かを判定することができる。これにより、ステアリング装置は、運転者がステアリング本体を把持しているか否かを精度よく判定することができる。そして、ステアリング本体を運転者が把持していないと判定した場合に、ステアリング装置は、警告を出力させることができる。これにより、ステアリング装置は、運転者がステアリング本体を把持するように、運転者に注意喚起することができる。
(2)上記形態において、前記センサは、前記ステアリング装置と前記ウェアラブルデバイスとの無線通信を利用して、前記距離情報を取得してもよい。この形態によれば、ステアリング装置は、ステアリング装置とウェアラブルデバイスとの無線通信を利用して、距離情報を取得することができる。
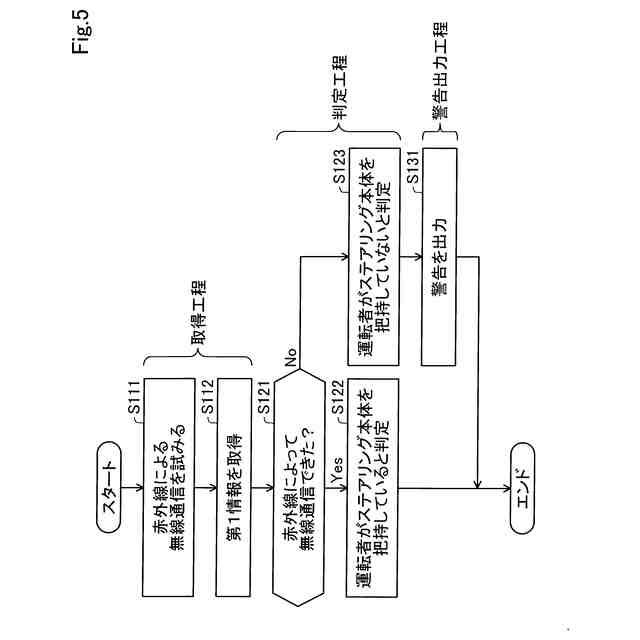
(3)上記形態において、前記センサは、前記ステアリング本体と前記デバイス本体とが予め定められた距離範囲内に存在する場合に、前記ウェアラブルデバイスのデバイス通信部と赤外線によって無線通信可能なステアリング通信部と、前記ステアリング通信部と前記デバイス通信部とが赤外線によって無線通信できたか否かを示す第1情報を前記距離情報として取得する取得部と、を備え、前記判定部は、前記第1情報が、前記ステアリング通信部と前記デバイス通信部とが赤外線によって無線通信できたことを示す情報である場合に、前記運転者が前記ステアリング本体を把持していると判定し、前記第1情報が、前記ステアリング通信部と前記デバイス通信部とが赤外線によって無線通信できなかったことを示す情報である場合に、前記運転者が前記ステアリング本体を把持していないと判定してもよい。この形態によれば、センサは、ステアリング通信部とデバイス通信部とが赤外線によって無線通信できたか否かを示す第1情報を距離情報として取得することができる。このようにすると、ステアリング装置は、赤外線通信の通信可能範囲を利用して、運転者がステアリング本体を把持しているか否かを判定することができる。
(4)上記形態において、前記センサは、前記ステアリング本体と前記デバイス本体との距離を測定する測距部と、前記測距部によって測定された前記ステアリング本体と前記デバイス本体との前記距離を示す第2情報を前記距離情報として取得する取得部と、を備え、前記判定部は、前記第2情報によって特定される前記ステアリング本体と前記デバイス本体との前記距離が予め定められた範囲内である場合に、前記運転者が前記ステアリング本体を把持していると判定し、前記第2情報によって特定される前記ステアリング本体と前記デバイス本体との前記距離が前記予め定められた範囲から外れる場合に、前記運転者が前記ステアリング本体を把持していないと判定してもよい。この形態によれば、センサは、ステアリング本体とデバイス本体との距離を測定することができる。そして、センサは、ステアリング本体とデバイス本体との距離を示す第2情報を距離情報として取得することができる。このようにすると、ステアリング装置は、ステアリング本体とデバイス本体との距離が予め定められた範囲内であるか否かに応じて、運転者がステアリング本体を把持しているか否かを判定することができる。
(5)上記形態において、前記センサは、前記ステアリング本体の全体に亘って配置されていてもよい。この形態によれば、センサがステアリング本体の全体に亘って配置されている。これにより、運転者がステアリング本体のいずれの部分を把持している場合にも、運転者がステアリング本体を把持しているか否かを判定することができる。
(6)上記形態において、前記センサは、前記ステアリング本体の一部に配置されていてもよい。この形態によれば、センサがステアリング本体の一部に配置されている。これにより、ステアリング本体のうち、センサが配置された部分を運転者が把持しているか否かを判定することができる。
(7)本開示の第2形態によれば、移動体が提供される。移動体は、前記移動体の運転者が把持するためのステアリング本体と、前記ステアリング本体と前記運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離情報を取得するセンサと、を備えるステアリング装置と、前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える。この形態によれば、移動体は、ステアリング装置のステアリング本体と運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離に応じて、運転者がステアリング本体を把持しているか否かを判定することができる。これにより、移動体は、運転者がステアリング本体を把持しているか否かを精度よく判定することができる。そして、ステアリング本体を運転者が把持していないと判定した場合に、移動体は、警告を出力させることができる。これにより、移動体は、運転者がステアリング本体を把持するように、運転者に注意喚起することができる。
(8)上記形態において、さらに、前記ウェアラブルデバイスのデバイス通信部と電磁波によって無線通信可能な移動体通信部と、前記ウェアラブルデバイスを識別可能なデバイス識別情報を含むデバイス識別信号を前記ウェアラブルデバイスから受信した場合に、前記デバイス識別信号に含まれる前記デバイス識別情報と、前記移動体を識別可能な移動体識別情報と、を照合する照合部と、前記デバイス識別情報と前記移動体識別情報とが一致する場合に、前記移動体に予め定められた動作を実行させる実行部と、を備えてもよい。この形態によれば、移動体は、デバイス識別情報を含むデバイス識別信号をウェアラブルデバイスから受信した場合に、デバイス識別信号に含まれるデバイス識別情報と移動体識別情報とを照合することができる。そして、移動体は、デバイス識別情報と移動体識別情報とが一致する場合に、移動体に予め定められた動作を実行させることができる。
(9)上記形態において、さらに、前記ウェアラブルデバイスのデバイス通信部と電磁波によって無線通信可能な移動体通信部と、前記移動体を識別可能な移動体識別情報を含む移動体識別信号を前記ウェアラブルデバイスに送信する移動体側送信部と、前記ウェアラブルデバイスを識別可能なデバイス識別情報と前記移動体識別信号に含まれる前記移動体識別情報とが一致する場合に前記ウェアラブルデバイスにおいて生成される許可信号を前記ウェアラブルデバイスから受信した場合に、前記移動体に予め定められた動作を実行させる実行部と、を備えてもよい。この形態によれば、移動体は、移動体識別情報を含む移動体識別信号をウェアラブルデバイスに送信することができる。このようにすると、ウェアラブルデバイスにおいて、デバイス識別信号に含まれるデバイス識別情報と移動体識別情報とを照合することができる。そして、移動体は、デバイス識別情報と移動体識別情報とが一致する場合に生成される許可信号をウェアラブルデバイスから受信した場合に、移動体に予め定められた動作を実行させることができる。
(10)本開示の第3形態によれば、ウェアラブルデバイスが提供される。ウェアラブルデバイスは、移動体の運転者の手腕に装着可能なデバイス本体と、前記運転者が把持するためのステアリング本体と前記デバイス本体との距離情報を取得するセンサと、前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える。この形態によれば、ウェアラブルデバイスは、ステアリング装置のステアリング本体と運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離に応じて、運転者がステアリング本体を把持しているか否かを判定することができる。これにより、ウェアラブルデバイスは、運転者がステアリング本体を把持しているか否かを精度よく判定することができる。そして、ステアリング本体を運転者が把持していないと判定した場合に、ウェアラブルデバイスは、警告を出力させることができる。これにより、ウェアラブルデバイスは、運転者がステアリング本体を把持するように、運転者に注意喚起することができる。
(11)上記形態において、さらに、前記移動体の移動体通信部と電磁波によって無線通信可能なデバイス通信部と、前記ウェアラブルデバイスを識別可能なデバイス識別情報を含むデバイス識別信号を前記移動体に送信するデバイス側送信部と、を備えてもよい。この形態によれば、ウェアラブルデバイスは、デバイス識別情報を含むデバイス識別信号を移動体に送信することができる。このようにすると、移動体において、デバイス識別信号に含まれるデバイス識別情報と移動体識別情報とを照合することができる。これにより、デバイス識別情報と移動体識別情報とが一致する場合に、移動体に予め定められた動作を実行させることができる。
(12)上記形態において、さらに、前記移動体の移動体通信部と電磁波によって無線通信可能なデバイス通信部と、前記移動体を識別可能な移動体識別情報を含む移動体識別信号を前記移動体から受信した場合に、前記ウェアラブルデバイスを識別可能なデバイス識別情報と、前記移動体識別信号に含まれる前記移動体識別情報と、を照合する照合部と、前記デバイス識別情報と前記移動体識別情報とが一致する場合に、前記移動体に予め定められた動作を実行させることを許可するための許可信号を生成して、前記移動体に送信するデバイス側送信部と、を備えてもよい。この形態によれば、ウェアラブルデバイスは、デバイス識別信号に含まれるデバイス識別情報と移動体識別情報とを照合することができる。そして、デバイス識別情報と移動体識別情報とが一致する場合に、許可信号を生成して、許可信号を移動体に送信することができる。このようにすると、許可信号をウェアラブルデバイスから受信した移動体が、予め定められた動作を実行させることができる。
(13)本開示の第4形態によれば、運転支援システムが提供される。運転支援システムは、ステアリング装置を備える移動体と、前記移動体の運転者の手腕に装着可能なデバイス本体を備えるウェアラブルデバイスと、前記ステアリング装置のうち前記運転者が把持するためのステアリング本体と前記デバイス本体との距離情報を取得するセンサと、前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定部と、前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力部と、を備える。この形態によれば、運転支援システムは、ステアリング装置のステアリング本体と運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離に応じて、運転者がステアリング本体を把持しているか否かを判定することができる。これにより、運転支援システムは、運転者がステアリング本体を把持しているか否かを精度よく判定することができる。そして、ステアリング本体を運転者が把持していないと判定した場合に、運転支援システムは、警告を出力させることができる。これにより、運転支援システムは、運転者がステアリング本体を把持するように、運転者に注意喚起することができる。
(14)上記形態において、前記ウェアラブルデバイスは、外部と電磁波によって無線通信可能なデバイス通信部と、前記ウェアラブルデバイスを識別可能なデバイス識別情報を含むデバイス識別信号を前記移動体に送信するデバイス側送信部と、を備え、前記移動体は、さらに、外部と前記電磁波によって無線通信可能な移動体通信部と、前記ウェアラブルデバイスから前記デバイス識別信号を受信した場合に、前記デバイス識別信号に含まれる前記デバイス識別情報と、前記移動体を識別可能な移動体識別情報と、を照合する照合部と、前記デバイス識別情報と前記移動体識別情報とが一致する場合に、前記移動体に予め定められた動作を実行させる実行部と、を備えてもよい。この形態によれば、ウェアラブルデバイスは、デバイス識別情報を含むデバイス識別信号を移動体に送信することができる。移動体は、デバイス識別情報を含むデバイス識別信号をウェアラブルデバイスから受信した場合に、デバイス識別信号に含まれるデバイス識別情報と移動体識別情報とを照合することができる。そして、移動体は、デバイス識別情報と移動体識別情報とが一致する場合に、移動体に予め定められた動作を実行させることができる。
(15)上記形態において、前記ウェアラブルデバイスは、外部と電磁波によって無線通信可能なデバイス通信部と、前記移動体を識別可能な移動体識別情報を含む移動体識別信号を前記移動体から受信した場合に、前記ウェアラブルデバイスを識別可能なデバイス識別情報と、前記移動体識別信号に含まれる前記移動体識別情報と、を照合する照合部と、前記デバイス識別情報と前記移動体識別情報とが一致する場合に、前記移動体に予め定められた動作を実行させることを許可するための許可信号を生成して、前記移動体に送信するデバイス側送信部と、を備え、前記移動体は、さらに、外部と前記電磁波によって無線通信可能な移動体通信部と、前記移動体識別信号を前記ウェアラブルデバイスに送信する移動体側送信部と、前記許可信号を前記ウェアラブルデバイスから受信した場合に、前記移動体に予め定められた動作を実行させる実行部と、を備えてもよい。この形態によれば、移動体は、移動体識別情報を含む移動体識別信号をウェアラブルデバイスに送信することができる。ウェアラブルデバイスは、デバイス識別信号に含まれるデバイス識別情報と移動体識別情報とを照合することができる。そして、デバイス識別情報と移動体識別情報とが一致する場合に、許可信号を生成して、許可信号を移動体に送信することができる。これにより、移動体は、許可信号をウェアラブルデバイスから受信した場合に、移動体に予め定められた動作を実行させることができる。
(16)本開示の第5形態によれば、運転支援方法が提供される。運転支援方法は、移動体の運転者が把持するためのステアリング本体と前記運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離情報を取得する取得工程と、前記距離情報を用いて、前記運転者が前記ステアリング本体を把持しているか否かを判定する判定工程と、前記運転者が前記ステアリング本体を把持していないと判定された場合に、警告を出力させる警告出力工程と、を備える。この形態によれば、ステアリング装置のステアリング本体と運転者の手腕に装着されたウェアラブルデバイスのデバイス本体との距離に応じて、運転者がステアリング本体を把持しているか否かを判定することができる。これにより、運転者がステアリング本体を把持しているか否かを精度よく判定することができる。そして、ステアリング本体を運転者が把持していないと判定した場合に、警告を出力させることができる。これにより、運転者がステアリング本体を把持するように、運転者に注意喚起することができる。
本開示は、上記のステアリング装置、移動体、ウェアラブルデバイス、運転支援システム、および、運転支援方法以外の種々の形態で実現することが可能である。例えば、ステアリング装置、移動体、ウェアラブルデバイス、および、運転支援システムの製造方法、ステアリング装置、移動体、ウェアラブルデバイス、および、運転支援システムの制御方法、その制御方法を実現するコンピュータプログラム、そのコンピュータプログラムを記録した一時的でない記録媒体等の形態で実現することができる。
【図面の簡単な説明】
【0007】
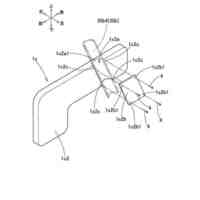
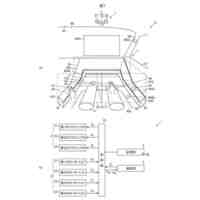
運転支援システムの構成を示す概念図である。
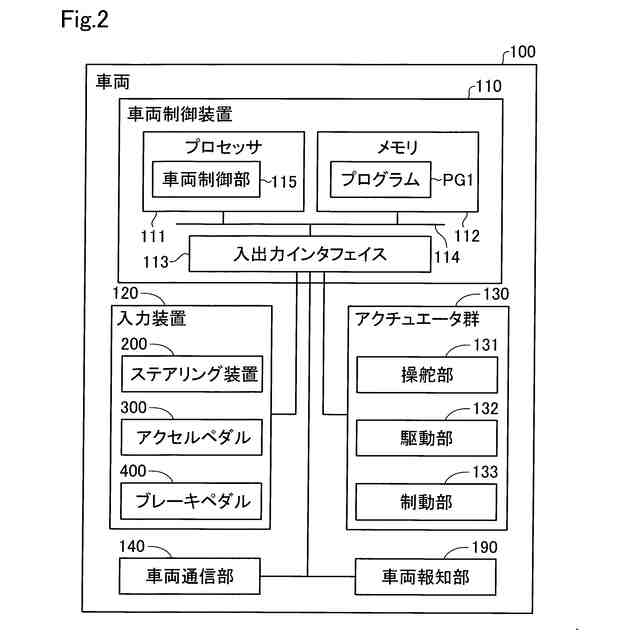
車両の構成を示すブロック図である。
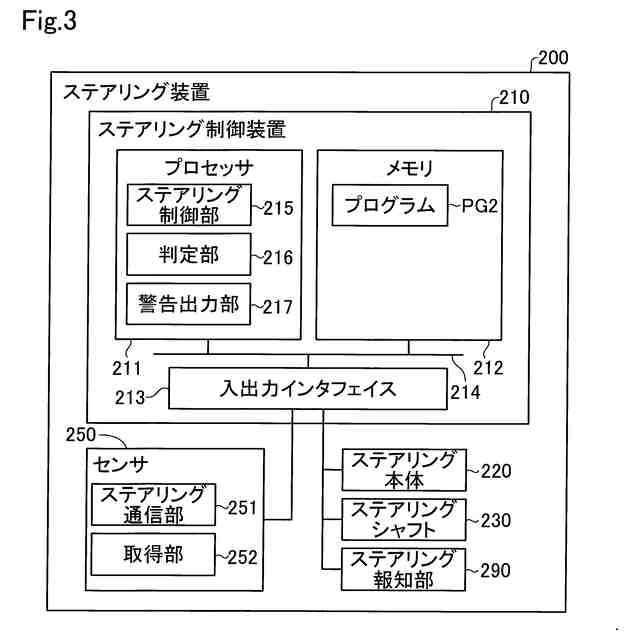
ステアリング装置の構成を示すブロック図である。
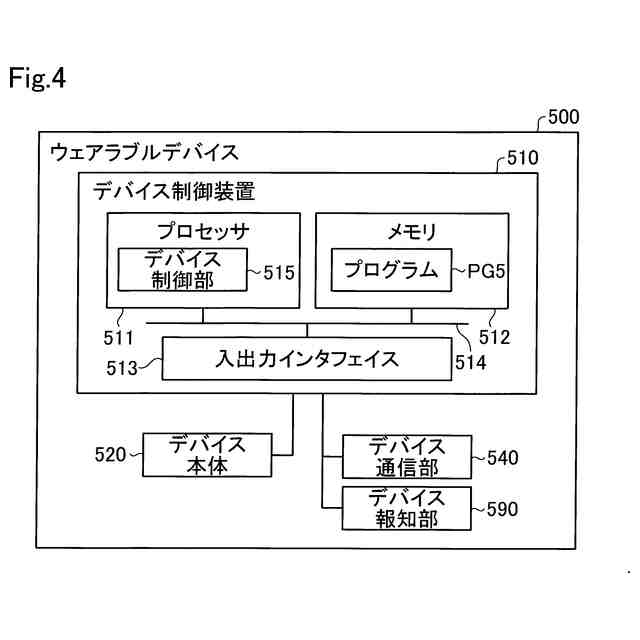
ウェアラブルデバイスの構成を示すブロック図である。
第1実施形態における運転支援方法を示すフローチャートである。
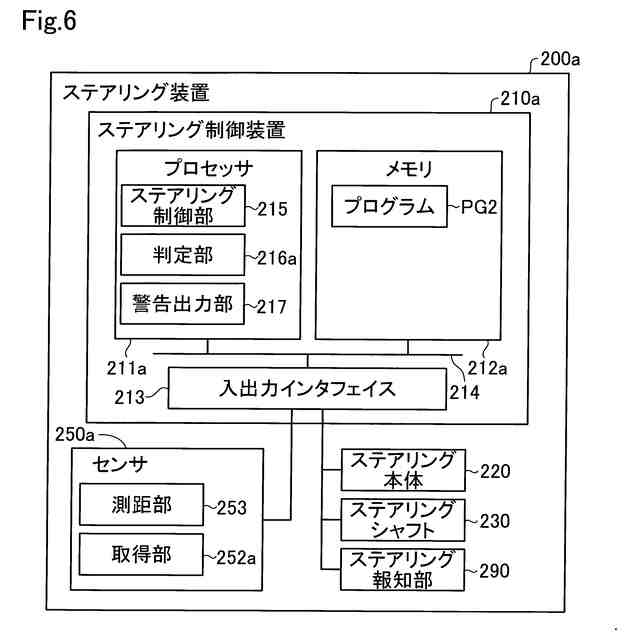
第2実施形態におけるステアリング装置の構成を示すブロック図である。
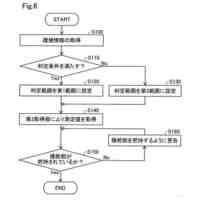
第2実施形態における運転支援方法を示すフローチャートである。
第3実施形態における車両の構成を示すブロック図である。
第3実施形態におけるウェアラブルデバイスの構成を示すブロック図である。
第3実施形態における動作制御方法を示すフローチャートである。
第4実施形態における車両の構成を示すブロック図である。
第4実施形態におけるウェアラブルデバイスの構成を示すブロック図である。
第4実施形態における動作制御方法を示すフローチャートである。
【発明を実施するための形態】
【0008】
A.第1実施形態:
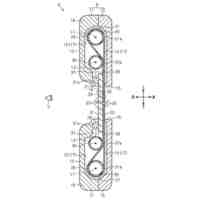
図1は、運転支援システム1の構成を示す概念図である。運転支援システム1は、移動体としての車両100と、ウェアラブルデバイス500と、を備える。
【0009】
図2は、車両100の構成を示すブロック図である。車両100は、車両制御装置110と、入力装置120と、アクチュエータ群130と、車両通信部140と、車両報知部190と、を備える。
【0010】
車両制御装置110は、プロセッサ111と、メモリ112と、入出力インタフェイス113と、バス114と、を備える。プロセッサ111、メモリ112、および、入出力インタフェイス113は、バス114を介して、双方向に通信可能に接続されている。入出力インタフェイス113には、入力装置120、アクチュエータ群130、車両通信部140、および、車両報知部190が接続されている。プロセッサ111は、メモリ112に記憶されたプログラムPG1を実行することで、車両制御部115として機能する。車両制御部115は、アクチュエータ群130を制御することで、車両100を走行させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
豊田合成株式会社
調光装置
3日前
豊田合成株式会社
ガラスラン
22日前
豊田合成株式会社
ガラスラン
15日前
豊田合成株式会社
ガラスラン
15日前
豊田合成株式会社
車両用内装品
17日前
豊田合成株式会社
乗員保護装置
9日前
豊田合成株式会社
機器制御装置
15日前
豊田合成株式会社
車両用外装品
15日前
豊田合成株式会社
車両用内装品
17日前
豊田合成株式会社
乗員保護装置
15日前
豊田合成株式会社
エアバッグ装置
9日前
豊田合成株式会社
電動液体ポンプ
15日前
豊田合成株式会社
電動液体ポンプ
15日前
豊田合成株式会社
電動液体ポンプ
15日前
豊田合成株式会社
空調用レジスタ
16日前
豊田合成株式会社
空調用レジスタ
16日前
豊田合成株式会社
空調用レジスタ
16日前
豊田合成株式会社
立体エアバッグ
15日前
豊田合成株式会社
電動液体ポンプ
15日前
豊田合成株式会社
電動液体ポンプ
15日前
豊田合成株式会社
把持検知システム
11日前
豊田合成株式会社
ステアリング装置
11日前
豊田合成株式会社
ステアリング装置
9日前
豊田合成株式会社
把持検知システム
15日前
豊田合成株式会社
車両の音出力装置
19日前
豊田合成株式会社
ステアリング装置
10日前
豊田合成株式会社
ステアリング装置
10日前
豊田合成株式会社
車両の前部構造体
3日前
豊田合成株式会社
車両用体験システム
10日前
豊田合成株式会社
コンテンツ体験装置
10日前
豊田合成株式会社
コンソールボックス
17日前
豊田合成株式会社
コンソールボックス
17日前
豊田合成株式会社
電磁波透過性積層体
17日前
豊田合成株式会社
コンソールボックス
17日前
豊田合成株式会社
助手席用乗員保護装置
10日前
豊田合成株式会社
スタックマニホールド
15日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ