TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025145094
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045103
出願日
2024-03-21
発明の名称
自己位置推定装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社J-QuAD DYNAMICS
代理人
弁理士法人明成国際特許事務所
主分類
G01C
21/28 20060101AFI20250926BHJP(測定;試験)
要約
【課題】周囲の環境を検出するセンサによる検出結果に基づく自己位置推定の推定精度の低下を抑制する。
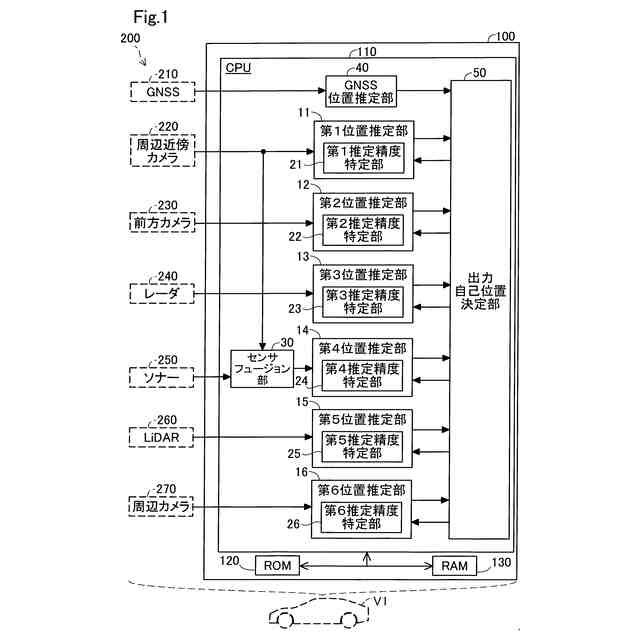
【解決手段】周囲の環境を検出する複数のセンサ200が搭載された車両V1の自己位置を推定するための自己位置推定装置100、100aは、各センサによる検出結果に基づき自己位置を推定する際の推定精度を、それぞれ特定する推定精度特定部21~26と、特定された各推定精度を利用して、各センサによる検出結果に基づき推定される自己位置のうちから、出力対象の自己位置である出力自己位置を決定する出力自己位置決定部50と、を備える。
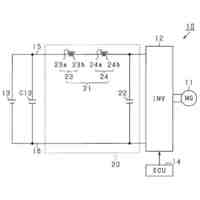
【選択図】図1
特許請求の範囲
【請求項1】
周囲の環境を検出する複数のセンサ(200)が搭載された車両(V1)の自己位置を推定するための自己位置推定装置(100、100a)であって、
各前記センサによる検出結果に基づき前記自己位置を推定する際の推定精度を、それぞれ特定する推定精度特定部(21~26)と、
特定された各前記推定精度を利用して、各前記センサによる検出結果に基づき推定される前記自己位置のうちから、出力対象の前記自己位置である出力自己位置を決定する出力自己位置決定部(50)と、
を備える、自己位置推定装置。
続きを表示(約 820 文字)
【請求項2】
請求項1に記載の自己位置推定装置であって、
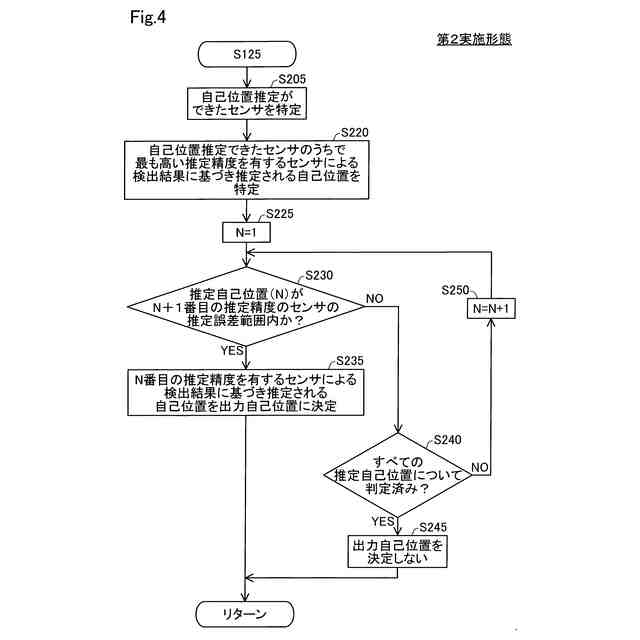
前記出力自己位置決定部は、予め定められた決定条件を満たす場合に、前記複数のセンサのうちで最も高い前記推定精度を有するセンサによる検出結果に基づき推定される前記自己位置を、前記出力自己位置として決定する、自己位置推定装置。
【請求項3】
請求項2に記載の自己位置推定装置において、
前記決定条件は、前記最も高い前記推定精度を有するセンサによる検出結果に基づき推定される前記自己位置が、2番目に高い前記推定精度を有するセンサによる検出結果に基づき推定される前記自己位置の推定誤差範囲内に含まれているとの条件を含む、自己位置推定装置。
【請求項4】
請求項3に記載の自己位置推定装置において、
前記出力自己位置決定部は、前記決定条件が満たされない場合、2番目以降に高い前記推定精度を有するセンサによる検出結果に基づき推定される前記自己位置を、前記出力自己位置として決定する、自己位置推定装置。
【請求項5】
請求項1から請求項4までのいずれか一項に記載の自己位置推定装置において、
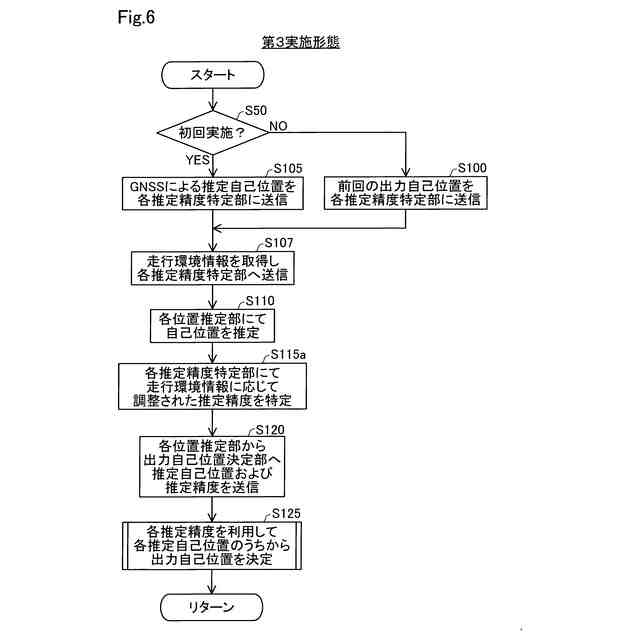
前記車両の走行環境に関する情報である走行環境情報を取得する環境情報取得部(60)を、さらに備え、
前記推定精度特定部は、前記推定精度を、前記走行環境情報が示す前記走行環境に応じて調整し、
前記出力自己位置決定部は、調整後の各前記推定精度を利用して、各前記センサによる検出結果に基づき推定される前記自己位置のうちから、前記出力自己位置を決定する、自己位置推定装置。
【請求項6】
請求項5に記載の自己位置推定装置において、
前記走行環境情報は、前記車両の走行場所における天候に関する情報と、前記車両の走行時間帯に関する情報と、のうちの少なくとも一方を含む、自己位置推定装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、自己位置推定装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来から車両等の移動体に搭載されたカメラやミリ波レーダ等のセンサの検出結果を利用して自己位置推定を行う技術が提案されている。特許文献1には、操舵角センサや車輪速センサ等の内界センサの検出値を利用したオドメトリによる自己位置推定結果を、前方カメラや前方レーダ等の外界センサの検出結果に基づき補正を行う方法が開示されている。また、特許文献2には、前方カメラの検出結果とミリ波レーダの検出結果とを組み合わせるいわゆるセンサフュージョンにより自己位置を推定する方法が開示されている。
【0003】
カメラやミリ波レーダ等の周囲の環境を検出するセンサを用いた自己位置推定は、夜間や天候によってその精度は変化し得る。特許文献1では、時間帯や天候などの使用環境の変化に応じた前方カメラや前方レーダ等の補正精度を特定し、その精度が低い場合にはさらにオドメトリの精度を特定する。そして、オドメトリの精度が低い場合には、衝突回避支援の態様を、より程度が低い態様とする。特許文献2では、気温情報や時刻情報などを取得し、取得された情報に基づき、霧が発生している、西日が差している、豪雨が降っているなどの悪環境であるか否かを判定するようにしている。
【先行技術文献】
【特許文献】
【0004】
特開2019-139400号公報
特開2022-014729号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1では、前方カメラや前方レーダ等の周囲の環境を検出するセンサの補正精度が低い場合には、オドメトリの精度の判定、および衝突回避支援の態様の変更を行っているにすぎず、自己位置の推定精度の低下を抑制できない。また、特許文献2では、単に、周囲の環境を検出するセンサにとっての悪環境であるか否かを判定しているに過ぎず、かかるセンサを用いた自己位置の推定精度の低下を抑制できない。そこで、周囲の環境を検出するセンサによる検出結果に基づく自己位置推定の推定精度の低下を抑制可能な技術が望まれる。
【課題を解決するための手段】
【0006】
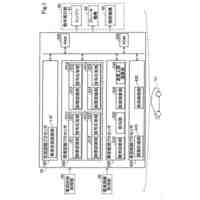
本開示の一形態として、周囲の環境を検出する複数のセンサ(200)が搭載された車両(V1)の自己位置を推定するための自己位置推定装置(100、100a)が提供される。この自己位置推定装置は、各前記センサによる検出結果に基づき前記自己位置を推定する際の推定精度を、それぞれ特定する推定精度特定部(21~26)と、特定された各前記推定精度を利用して、各前記センサによる検出結果に基づき推定される前記自己位置のうちから、出力対象の前記自己位置である出力自己位置を決定する出力自己位置決定部(50)と、を備える。
【0007】
この形態の自己位置推定装置によれば、各センサによる検出結果に基づき自己位置を推定する際の推定精度を特定し、特定された各推定精度を利用して、各センサによる検出結果に基づき推定される自己位置のうちから、出力対象の自己位置である出力自己位置を決定するので、周囲の環境を検出するセンサによる検出結果に基づく自己位置推定の推定精度の低下を抑制できる。
【図面の簡単な説明】
【0008】
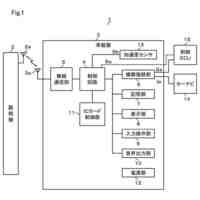
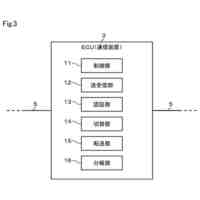
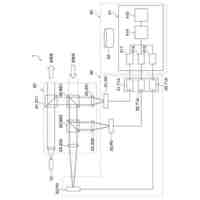
本開示の一実施形態としての自己位置推定装置の概略構成を示すブロック図である。
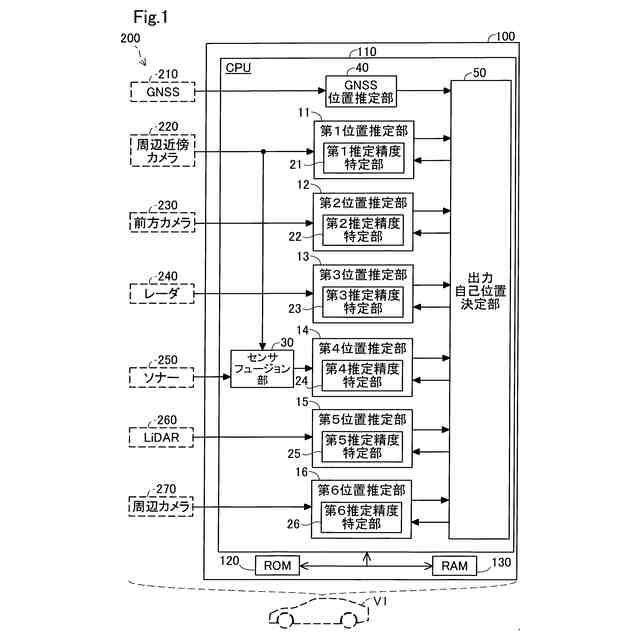
第1実施形態における出力自己位置決定処理の手順を示すフローチャートである。
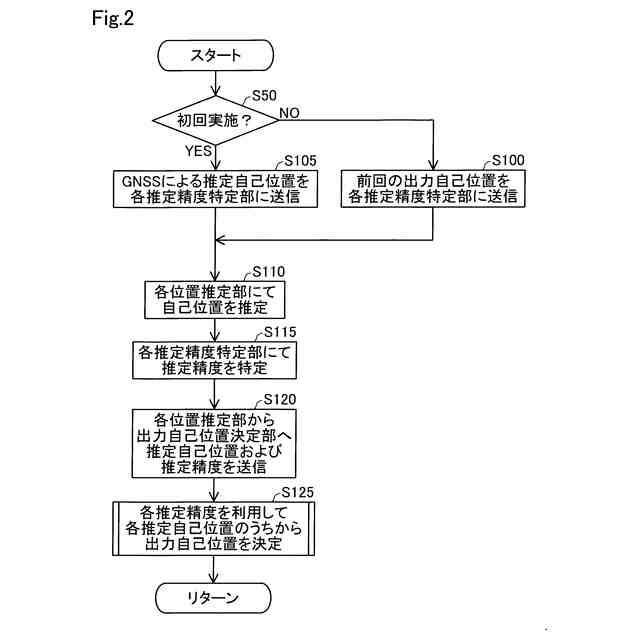
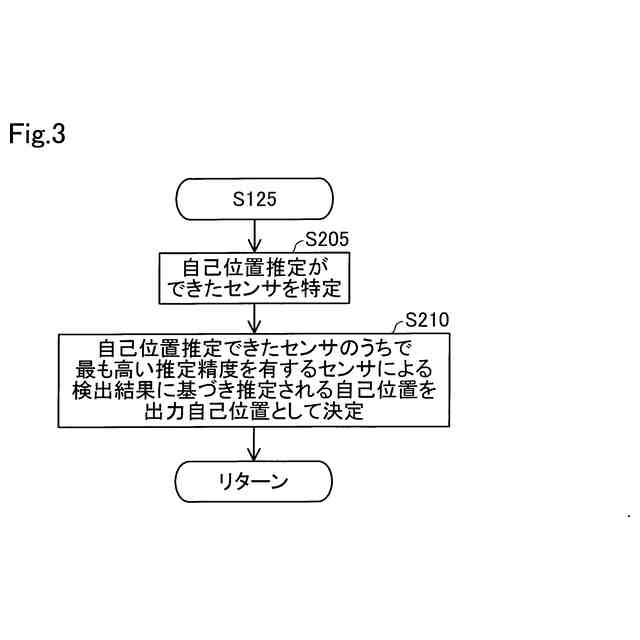
S125の詳細手順を示すフローチャートである。
第2実施形態におけるS125の詳細手順を示すフローチャートである。
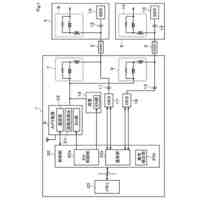
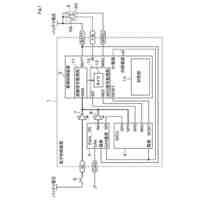
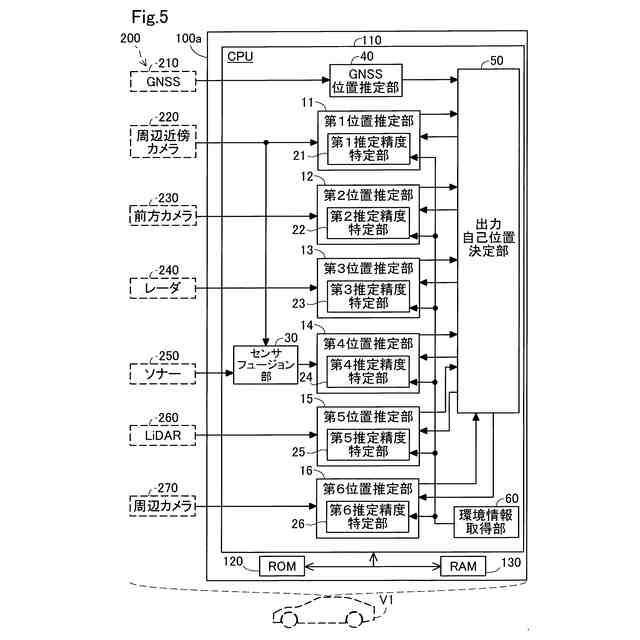
第3実施形態における自己位置推定装置の概略構成を示すブロック図である。
第3実施形態における出力自己位置決定処理の手順を示すフローチャートである。
第3実施形態における推定精度テーブルの設定内容の一例を示す説明図である。
【発明を実施するための形態】
【0009】
A.第1実施形態:
A1.装置構成:
図1に示す第1実施形態の自己位置推定装置100は、車両V1に搭載され、かかる車両の自己位置を推定するために用いられる。この車両V1には、自己位置推定装置100の他に複数のセンサからなるセンサ群200が搭載されている。
【0010】
センサ群200は、GNSS210と、周辺近傍カメラ220と、前方カメラ230と、レーダ240と、ソナー250と、LiDAR260と、周辺カメラ270とを含む。周辺近傍カメラ220、前方カメラ230、レーダ240、ソナー250および周辺カメラ270は、周囲の環境を検出するセンサといえる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社デンソー
車載器
1日前
株式会社デンソー
接合体
15日前
株式会社デンソー
平滑回路
25日前
株式会社デンソー
書込装置
1か月前
株式会社デンソー
太陽電池
17日前
株式会社デンソー
ステータ
1日前
株式会社デンソーエレクトロニクス
発音装置
23日前
株式会社デンソー
ねじ部材
1日前
株式会社デンソー
光学部材
26日前
株式会社デンソー
通信装置
1か月前
株式会社デンソー
ステータ
16日前
株式会社デンソー
駆動装置
1か月前
株式会社デンソー
電子装置
1か月前
株式会社デンソー
ステータ
16日前
株式会社デンソー
測距装置
1か月前
株式会社デンソー
ステータ
1日前
株式会社デンソー
ステータ
1か月前
株式会社デンソー
電子装置
5日前
株式会社デンソー
電子装置
1か月前
株式会社デンソーエレクトロニクス
発音装置
5日前
株式会社デンソー
ガスセンサ
1か月前
株式会社デンソー
レーダ装置
5日前
株式会社デンソー
レーダ装置
1か月前
株式会社デンソー
センサ素子
1か月前
株式会社デンソー
回転体装置
29日前
株式会社デンソー
半導体装置
1日前
株式会社デンソー
電力変換装置
9日前
株式会社デンソー
フィルタ回路
9日前
株式会社デンソー
制御システム
8日前
株式会社デンソー
ステータコア
8日前
株式会社デンソー
通信システム
5日前
株式会社デンソー
電子制御装置
16日前
株式会社デンソー
電気化学セル
5日前
株式会社デンソー
電子制御装置
5日前
株式会社デンソー
電子制御装置
1か月前
株式会社デンソー
電圧変換回路
16日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ