TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025140787
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040367
出願日
2024-03-14
発明の名称
異常検知システム、異常検知方法、及び制御プログラム
出願人
カナデビア株式会社
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
G05D
1/69 20240101AFI20250919BHJP(制御;調整)
要約
【課題】ロボットの異常を簡易な仕組みで検知できる異常検知システムを提供する。
【解決手段】異常検知システム(1)は、自走式の複数のロボット(20)を含み、複数のロボット(20)のうちの少なくとも1台である第1ロボット(20A)は、複数のロボット(20)のうちの他の少なくとも1台である第2ロボット(20B)の稼動状態を示す状態情報を取得する取得部(23)を有し、取得部(23)により取得した状態情報を用いて第2ロボット(20B)の異常を検知する検知装置(103)を備える。
【選択図】図1
特許請求の範囲
【請求項1】
自走式の複数のロボットを含み、
前記複数のロボットのうちの少なくとも1台である第1ロボットは、前記複数のロボットのうちの他の少なくとも1台である第2ロボットの稼動状態を示す状態情報を取得する取得部を有し、
前記取得部により取得した前記状態情報を用いて前記第2ロボットの異常を検知する検知装置を備える、異常検知システム。
続きを表示(約 1,800 文字)
【請求項2】
前記第1ロボット及び前記第2ロボットは、それぞれ予め定められた経路を移動し、
前記取得部は、当該第1ロボットを基準とする所定の範囲内に前記第2ロボットが入った場合および前記第1ロボットと前記第2ロボットとが所定の位置関係に位置した場合に、前記第2ロボットの前記状態情報を取得する、請求項1に記載の異常検知システム。
【請求項3】
前記取得部が前記状態情報を取得するタイミングに合わせて、前記第1ロボット及び前記第2ロボットの少なくとも一方の走行速度を低下させる速度制御部を備える、請求項1または2に記載の異常検知システム。
【請求項4】
前記取得部は、前記第1ロボットが前記第2ロボットとすれ違うとき、その前、またはその後に前記第2ロボットの前記状態情報を取得し、
前記第1ロボットが所定の期間内に再度前記第2ロボットとすれ違うときに、前回すれ違った側とは反対側の側面をすれ違うように前記第1ロボットを移動させる位置調整部を備える、請求項2に記載の異常検知システム。
【請求項5】
前記複数のロボットのうちの少なくとも1台である、前記第1ロボット及び前記第2ロボットとは異なる第3ロボットは、前記第2ロボットの前記状態情報を取得する第3取得部を有し、
前記第3取得部は、前記第3ロボットを基準とする所定の範囲内に前記第2ロボットが入った場合および前記第2ロボットと前記第3ロボットとが所定の位置関係に位置した場合に、前記第2ロボットの前記状態情報を取得するものであり、
前記第1ロボットの前記取得部は、前記第1ロボットが前記第2ロボットとすれ違うとき、その前、またはその後に前記第2ロボットの前記状態情報を取得し、
前記第1ロボットが前記第2ロボットと再度すれ違う前の所定の期間内に前記第3ロボットが前記第2ロボットとすれ違うときに、前記第1ロボットが前記第2ロボットとすれ違った側とは反対側の側面をすれ違うように前記第3ロボットを移動させる位置調整部を備える、請求項2に記載の異常検知システム。
【請求項6】
前記第1ロボットが前記第2ロボットの前記状態情報を取得するために、前記第1ロボット及び前記第2ロボットの少なくとも一方は、
(i)前記所定の範囲内に前記第2ロボットが入るように、
(ii)前記第1ロボットと前記第2ロボットとが前記所定の位置関係に位置するように、または、
(iii)前記所定の範囲よりも狭い範囲内もしくは前記所定の位置関係とは異なった位置関係で前記第2ロボットの状態情報を取得できるように、
互いの位置関係を調整する位置調整部を備える、請求項2に記載の異常検知システム。
【請求項7】
前記第1ロボットは、前記第2ロボットの前記状態情報を取得するという目的以外の所定の目的を達成するために予め定められた経路を移動し、
前記取得部として、前記第1ロボットが前記所定の目的を達成するために利用する機器を用いて前記状態情報を取得する、請求項1に記載の異常検知システム。
【請求項8】
前記取得部は、サーモカメラ、可視光カメラ、及びマイクロフォンの少なくとも一つから選択される、請求項1または2に記載の異常検知システム。
【請求項9】
自走式の複数のロボットを移動させ、
前記複数のロボットのうちの少なくとも1台である第1ロボットは、前記複数のロボットのうちの他の少なくとも1台である第2ロボットの稼動状態を示す状態情報を取得し、
取得した前記状態情報を用いて前記第2ロボットの異常を検知する、異常検知方法。
【請求項10】
請求項1に記載の異常検知システムで用いられる前記状態情報を取得するために前記第1ロボットおよび前記第2ロボットを制御する制御プログラムであって、
前記第1ロボットおよび前記第2ロボットを所定の経路で移動させる工程と
前記第1ロボットを基準とする所定の範囲内に前記第2ロボットが入った場合および前記第1ロボットと前記第2ロボットとが所定の位置関係に位置した場合に、前記第1ロボットに前記第2ロボットの前記状態情報を取得させる工程とをコンピュータに実行させる制御プログラム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、異常検知システム、異常検知方法、及び制御プログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ロボット内部における異常状態を検出する技術が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特開2016-64448号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術は、ロボット内部に異常検出機能が備わっており、その異常検出機能を使ってロボットが自身の異常を検出するものである。そのため、ロボットの内部構造が複雑になる、コストが高くなる、といった懸念がある。
【0005】
本開示の一態様は、ロボットの異常を簡易な仕組みで検知できる、異常検知システム、異常検知方法、及び制御プログラムを実現することを目的とする。
【課題を解決するための手段】
【0006】
上記の課題を解決するために、本開示の一態様に係る異常検知システムは、自走式の複数のロボットを含み、前記複数のロボットのうちの少なくとも1台である第1ロボットは、前記複数のロボットのうちの他の少なくとも1台である第2ロボットの稼動状態を示す状態情報を取得する取得部を有し、前記取得部により取得した前記状態情報を用いて前記第2ロボットの異常を検知する検知装置を備える。
【0007】
上記の課題を解決するために、本開示の一態様に係る異常検知方法は、自走式の複数のロボットを移動させ、前記複数のロボットのうちの少なくとも1台である第1ロボットは、前記複数のロボットのうちの他の少なくとも1台である第2ロボットの稼動状態を示す状態情報を取得し、取得した前記状態情報を用いて前記第2ロボットの異常を検知する。
【0008】
上記の課題を解決するために、本開示の一態様に係る制御プログラムは、前記異常検知システムで用いられる前記状態情報を取得するために前記第1ロボットおよび前記第2ロボットを制御する制御プログラムであって、前記第1ロボットおよび前記第2ロボットを所定の経路で移動させる工程と前記第1ロボットを基準とする所定の範囲内に前記第2ロボットが入った場合および前記第1ロボットと前記第2ロボットとが所定の位置関係に位置した場合に、前記第1ロボットに前記第2ロボットの前記状態情報を取得させる工程とをコンピュータに実行させる。
【発明の効果】
【0009】
本開示は、ロボットの異常を簡易な仕組みで検知できる、異常検知システム、異常検知方法、及び制御プログラムを実現できる。
【図面の簡単な説明】
【0010】
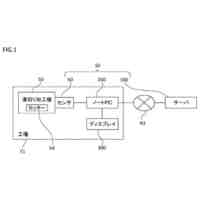
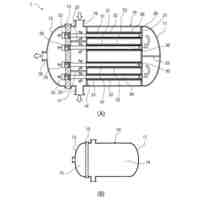
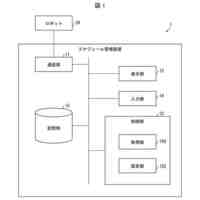
本開示に係る管理システムの概要構成を説明する図である。
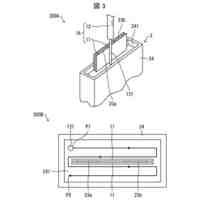
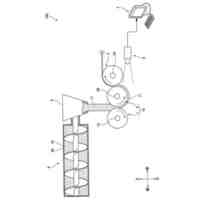
本開示に係るロボットの一例を示す図である。
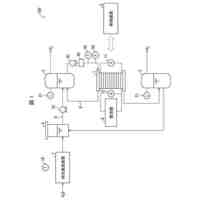
ロボットの走行経路の一例を示す図である。
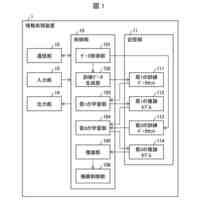
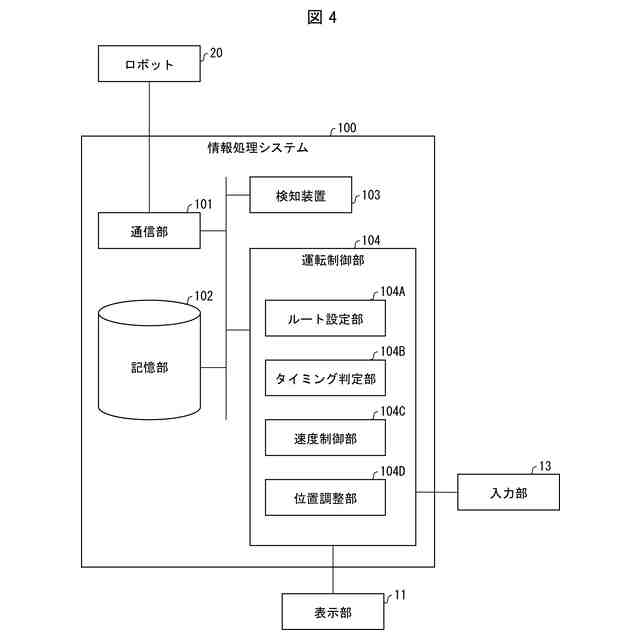
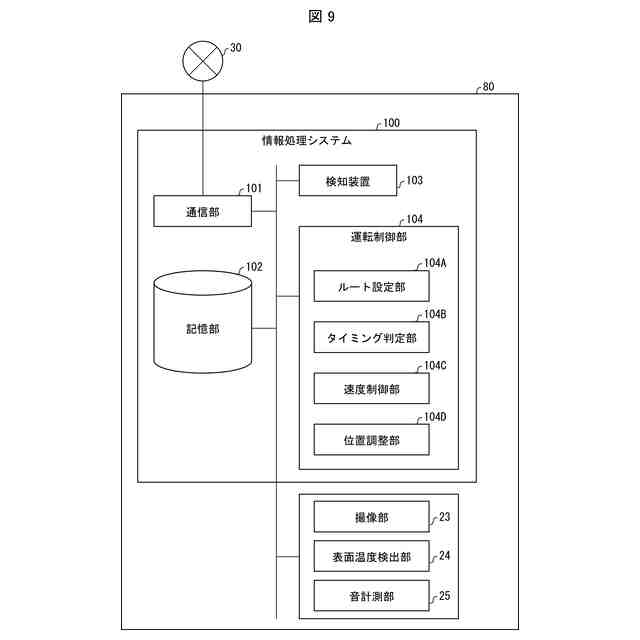
本開示に係る情報処理システムの機能ブロック図である。
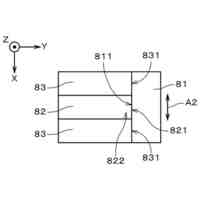
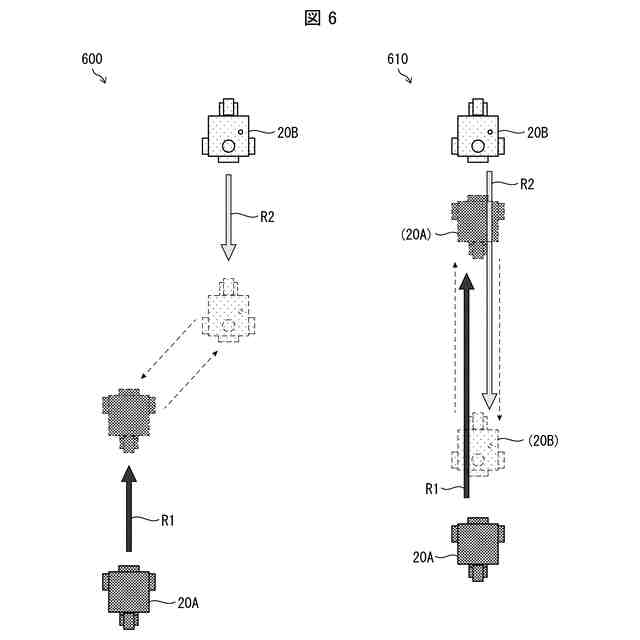
第1ロボットが第2ロボットの状態情報を所定の範囲及び/又は所定の位置関係から取得する例を模式的に説明する図である。
第1ロボットが第2ロボットの状態情報を所定の範囲及び/又は所定の位置関係から取得する例を模式的に説明する図である。
3台のロボットが施設において協働するときのロボットの位置制御を説明するための図である。
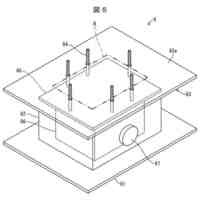
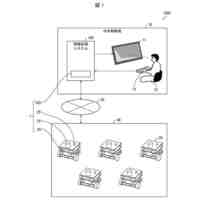
本開示に係る施設の概要構成を説明する図である。
本開示に係るロボットの機能ブロック図である。
本開示に係る異常検知方法のフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
カナデビア株式会社
サクション基礎
1か月前
カナデビア株式会社
排ガス処理システム
1か月前
カナデビア株式会社
封止装置および電池製造方法
1か月前
カナデビア株式会社
全固体電池およびその製造方法
1か月前
鹿島建設株式会社
塔状構造物
9日前
カナデビア株式会社
電池製造装置および電池製造方法
1か月前
カナデビア株式会社
電池製造装置および電池製造方法
1か月前
カナデビア株式会社
情報処理装置および情報管理システム
1か月前
カナデビア株式会社
積層型電池および積層型電池の製造方法
1か月前
カナデビア株式会社
線形摩擦接合方法および線形摩擦接合装置
1か月前
カナデビア株式会社
全固体電池の製造方法および電池製造装置
1か月前
カナデビア株式会社
吸収転換触媒及び炭化水素化合物の製造方法
2か月前
カナデビア株式会社
情報処理装置、学習方法、および学習プログラム
1か月前
カナデビア株式会社
情報処理装置、学習方法、および学習プログラム
1か月前
カナデビア株式会社
サクション基礎及びサクション基礎の地盤設置方法
1か月前
カナデビア株式会社
ピーニング方法、ピーニング装置および溶接構造物
22日前
カナデビア株式会社
異常判定システム、異常判定方法及び制御プログラム
17日前
カナデビア株式会社
異常検知システム、異常検知方法、及び制御プログラム
2か月前
カナデビア株式会社
樹脂シートの押出成形装置及び樹脂シートの押出成形方法
3か月前
カナデビア株式会社
制御装置、水電解システム、制御方法および制御プログラム
1か月前
カナデビア株式会社
被分離流体が流れる通路形成用の外管及びこれを用いた分離装置
1日前
カナデビア株式会社
情報処理装置、情報処理プログラム、情報処理システムおよび情報端末装置
1か月前
カナデビア株式会社
スケジュール管理装置、スケジュール管理方法、及びスケジュール管理プログラム
1か月前
国立大学法人 奈良先端科学技術大学院大学
データ作成システムおよびデータ作成方法
2か月前
個人
生産早送り装置
3か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
2か月前
株式会社熊谷組
障害物の検出方法
1か月前
ローム株式会社
基準電圧源
2か月前
愛知製鋼株式会社
車両用システム
3か月前
個人
作業車両自動化システム
3か月前
新電元工業株式会社
作業用ロボット
1か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
1日前
豊田合成株式会社
機器制御装置
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ