TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135726
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033656
出願日
2024-03-06
発明の名称
モータ制御装置およびモータ制御方法
出願人
日本精工株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
6/28 20160101AFI20250911BHJP(電力の発電,変換,配電)
要約
【課題】3相モータ電流の検出回路が簡素であり、電流値の検出および電流値を用いたモータ制御の信頼性が高いモータ制御装置およびモータ制御方法を提供する。
【解決手段】モータ制御装置は、電流指令値に基づいて3相モータを制御するモータ制御装置において、前記3相モータの3相電流のうち第一電流の電流値を電流検出周期に基づいて検出する第一電流センサと、前記3相電流のうち前記第一電流以外の第二電流の電流値を前記電流検出周期に基づいて検出する第二電流センサと、前記電流検出周期とは独立した電流制御周期に基づいて、前記3相電流のうち前記第一電流および前記第二電流以外の第三電流の電流値を算出し、前記3相電流の電流値に基づいて前記電流指令値を算出するコントローラと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
電流指令値に基づいて3相モータを制御するモータ制御装置において、
前記3相モータの3相電流のうち第一電流の電流値を電流検出周期に基づいて検出する第一電流センサと、
前記3相電流のうち前記第一電流以外の第二電流の電流値を前記電流検出周期に基づいて検出する第二電流センサと、
前記電流検出周期とは独立した電流制御周期に基づいて、前記3相電流のうち前記第一電流および前記第二電流以外の第三電流の電流値を算出し、前記3相電流の電流値に基づいて前記電流指令値を算出するコントローラと、
を備える、
モータ制御装置。
続きを表示(約 960 文字)
【請求項2】
前記第一電流センサは、アナログ/デジタル変換器を含み、
前記第二電流センサは、アナログ/デジタル変換器を含む、
請求項1に記載のモータ制御装置。
【請求項3】
前記コントローラは、前記電流制御周期に基づいて、予め決められた順序で前記第一電流センサおよび前記第二電流センサから検出された電流値を取得する、
請求項1または請求項2に記載のモータ制御装置。
【請求項4】
前記第一電流センサおよび前記第二電流センサは、前記コントローラによって電流値が取得されたあと、次周期の電流値の検出処理を前記電流検出周期に基づいて開始する、
請求項1または請求項2に記載のモータ制御装置。
【請求項5】
電流指令値に基づいて3相モータを制御するモータ制御方法であって、
前記3相モータの3相電流のうち第一電流の電流値を電流検出周期に基づいて検出する第一電流検出工程と、
前記3相電流のうち前記第一電流以外の第二電流の電流値を前記電流検出周期に基づいて検出する第二電流検出工程と、
前記電流検出周期とは独立した電流制御周期に基づいて、前記3相電流のうち前記第一電流および前記第二電流以外の第三電流の電流値を算出し、前記3相電流の電流値に基づいて前記電流指令値を算出するモータ制御工程と、
を備える、
モータ制御方法。
【請求項6】
前記第一電流検出工程は、アナログ/デジタル変換を含み、
前記第二電流検出工程は、アナログ/デジタル変換を含む、
請求項5に記載のモータ制御方法。
【請求項7】
前記モータ制御工程は、前記電流制御周期に基づいて、予め決められた順序で前記第一電流検出工程および前記第二電流検出工程において検出された電流値を取得する、
請求項5または請求項6に記載のモータ制御方法。
【請求項8】
前記第一電流検出工程および前記第二電流検出工程は、前記モータ制御工程によって電流値が取得されたあと、次周期の電流値の検出処理を前記電流検出周期に基づいて開始する、
請求項5または請求項6に記載のモータ制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータ制御装置およびモータ制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
車両等の制御において、高効率な3相モータが多く使用されている。3相モータを制御するモータ制御装置は、3相モータから検出した電流値に基づいてフィードバック制御を実施する。特許文献1に記載の電気モータの制御は、3個の電流センサにて3相モータ電流の電流値を検出し、検出した電流値を用いて3相モータのフィードバック制御を実施する。
【先行技術文献】
【特許文献】
【0003】
特開2008-048541号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1等に記載の従来の電気モータの制御装置および制御方法は、電流検出用のスイッチや検出回路の構成が煩雑であった。また、電流値を検出してフィードバック制御を行うコントローラ等の処理負荷が高く、電流値の検出漏れ等により制御の信頼性が低下することがあった。
【0005】
上記事情を踏まえ、本発明は、3相モータ電流の検出回路が簡素であり、電流値の検出および電流値を用いたモータ制御の信頼性が高いモータ制御装置およびモータ制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明の第一の態様に係るモータ制御装置は、電流指令値に基づいて3相モータを制御するモータ制御装置において、前記3相モータの3相電流のうち第一電流の電流値を電流検出周期に基づいて検出する第一電流センサと、前記3相電流のうち前記第一電流以外の第二電流の電流値を前記電流検出周期に基づいて検出する第二電流センサと、前記電流検出周期とは独立した電流制御周期に基づいて、前記3相電流のうち前記第一電流および前記第二電流以外の第三電流の電流値を算出し、前記3相電流の電流値に基づいて前記電流指令値を算出するコントローラと、を備える。
【0007】
本発明の第二の態様に係るモータ制御方法は、電流指令値に基づいて3相モータを制御するモータ制御方法であって、前記3相モータの3相電流のうち第一電流の電流値を電流検出周期に基づいて検出する第一電流検出工程と、前記3相電流のうち前記第一電流以外の第二電流の電流値を前記電流検出周期に基づいて検出する第二電流検出工程と、前記電流検出周期とは独立した電流制御周期に基づいて、前記3相電流のうち前記第一電流および前記第二電流以外の第三電流の電流値を算出し、前記3相電流の電流値に基づいて前記電流指令値を算出するモータ制御工程と、を備える。
【発明の効果】
【0008】
本発明のモータ制御装置およびモータ制御方法によれば、3相モータ電流の検出回路が簡素であり、電流値の検出および電流値を用いたモータ制御の信頼性が高い。
【図面の簡単な説明】
【0009】
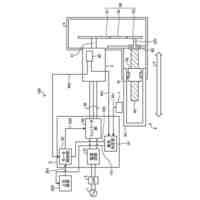
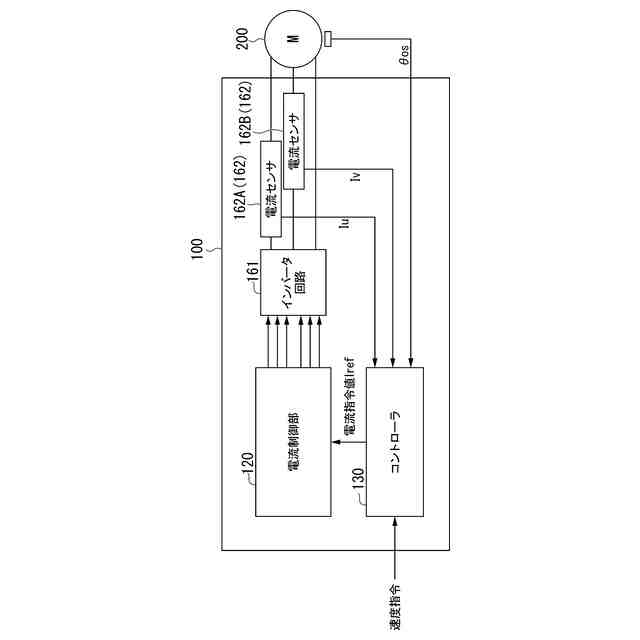
一実施形態に係るモータ制御装置を示す図である。
同モータ制御装置のインバータ回路および電流センサの構成図である。
同モータ制御装置のコントローラを示す図である。
同モータ制御装置の電流センサと同コントローラのシーケンス図である。
【発明を実施するための形態】
【0010】
本発明の一実施形態について、図1から図4を参照して説明する。
図1は、本実施形態に係るモータ制御装置100を示す図である。モータ制御装置100は電動モータ200を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精工株式会社
温度検出装置
21日前
日本精工株式会社
ボールねじ装置
1か月前
日本精工株式会社
転がり案内装置
1か月前
日本精工株式会社
円すいころ軸受
1か月前
日本精工株式会社
アクチュエータ
27日前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
20日前
日本精工株式会社
逆入力遮断クラッチ
26日前
日本精工株式会社
磁歪式トルクセンサ
1か月前
日本精工株式会社
モータ制御システム
1か月前
日本精工株式会社
環境配慮型機械部品
11日前
日本精工株式会社
磁歪式トルクセンサ
2か月前
日本精工株式会社
直動案内装置の組立方法
1か月前
日本精工株式会社
アクチュエータシステム
1か月前
日本精工株式会社
ラジアルころ軸受用保持器
1か月前
日本精工株式会社
ハブユニット軸受の製造方法
21日前
日本精工株式会社
潤滑機能付き転がり軸受装置
2か月前
日本精工株式会社
直動案内装置及びその製造方法
1か月前
日本精工株式会社
ころ軸受及びころ軸受の設計方法
1か月前
日本精工株式会社
回路放熱機構および回路放熱方法
2か月前
日本精工株式会社
片持ち回転ローラ配置型円形車輪
1か月前
日本精工株式会社
ハブユニット軸受及びその製造方法
1か月前
協同油脂株式会社
グリース組成物
1か月前
日本精工株式会社
含油部材付歯車、直動アクチュエータ
1か月前
日本精工株式会社
深溝玉軸受用保持器、及びその製造方法
12日前
日本精工株式会社
細胞培養成形装置および細胞培養片の製造方法
2か月前
日本精工株式会社
光学式エンコーダユニット及び光学式エンコーダ
11日前
日本精工株式会社
光学式エンコーダユニット及び光学式エンコーダ
11日前
日本精工株式会社
潤滑剤供給体及び潤滑剤供給体を配設した転動装置
1か月前
日本精工株式会社
データ読み取りシステムおよび設備保全管理システム
21日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ