TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025167790
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024072705
出願日
2024-04-26
発明の名称
光学式エンコーダユニット及び光学式エンコーダ
出願人
日本精工株式会社
代理人
弁理士法人栄光事務所
主分類
G01D
5/347 20060101AFI20251030BHJP(測定;試験)
要約
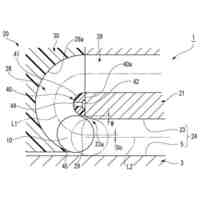
【課題】小型化が可能な光学式エンコーダユニットを提供する。
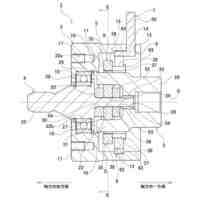
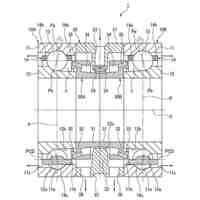
【解決手段】光学式エンコーダユニットは、回転機械に連結されるシャフトと、シャフトの上端面に固定される光学スケールと、光源からの光源光が光学スケールに透過又は反射して入射する入射光を受光する光学センサユニットと、シャフトの外周面に一方の内輪軌道面が形成されると共に、シャフトの外周面に他方の内輪軌道面が形成される内輪が外嵌され、一対の外輪軌道面が形成される外輪を有する複列玉軸受と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
回転機械に連結されるシャフトと、
前記シャフトの上端面に固定される光学スケールと、
光源からの光源光が前記光学スケールに透過又は反射して入射する入射光を受光する光学センサユニットと、
前記シャフトの外周面に一方の内輪軌道面が形成されると共に、前記シャフトの外周面に他方の内輪軌道面が形成される内輪が外嵌され、一対の外輪軌道面が形成される外輪を有する複列玉軸受と、
を備える、光学式エンコーダユニット。
続きを表示(約 310 文字)
【請求項2】
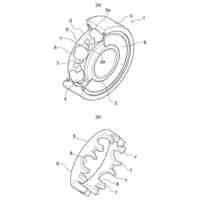
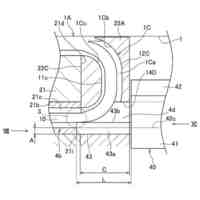
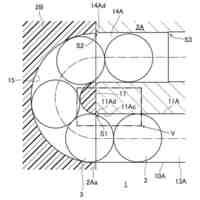
前記複列玉軸受は、前記シャフトに沿って並べて配置される複数列の玉と、各列の前記玉を保持する複数の保持器を有し、
前記光学スケール側の前記保持器は、前記光学スケール側を開口する、請求項1に記載の光学式エンコーダユニット。
【請求項3】
前記保持器は、冠型保持器である、請求項2に記載の光学式エンコーダユニット。
【請求項4】
請求項1~3のいずれか1項に記載の光学式エンコーダユニットと、
前記光学センサユニットが検出する光強度から、前記光学スケールと前記光学センサユニットとの相対的な移動量を演算する演算手段と、を含むことを特徴とする光学式エンコーダ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、光学スケールを用いて角度を検出する光学式エンコーダユニット及び光学式エンコーダに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
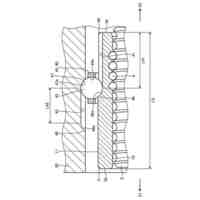
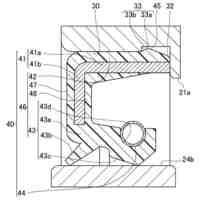
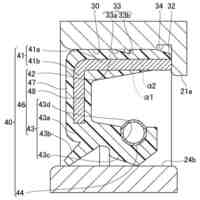
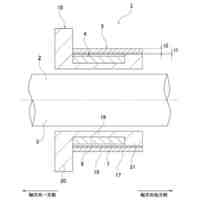
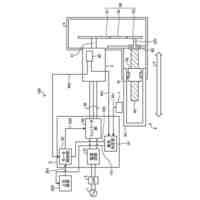
ロボット等に使用されるサーボモータには、回転角度や位置の検出のため、光学式エンコーダが取り付けられている。光学式エンコーダユニットとしては、例えば、特許文献1に記載のものが知られている。具体的に、図2に示すように、光学式エンコーダユニット31は、モータ等の回転機械に連結されたシャフト12を有するロータ10と、ステータ20と、信号パターンを読み取り可能な光学センサユニット35とを有している。
【0003】
ロータ10は、シリコン、ガラス、高分子材料などで形成され、円板形状もしくは多角形形状を有する光学スケール11を有している。光学スケール11の一方の板面は、信号トラックを有している。また、ロータ10には、光学スケール11の取り付けられた板面に対し他方の板面にシャフト12が取り付けられている。
【0004】
ステータ20は、遮光性の部材からなる円筒状のカバー21と、センサ基板23とを備えている。円筒状のカバー21は、センサ基板23の側面を覆うと共に、軸受26と、シャフト12と、光学スケール11と、光学センサユニット35とを囲む。
【0005】
カバー21は、軸受26を介してシャフト12を回転可能に支持する。カバー21の内周が軸受26の外輪に固定されており、シャフト12の外周が軸受26の内輪に固定されている。
【0006】
シャフト12がモータ等回転機械からの回転により回転すると、シャフト12に連動して光学スケール11が回転中心を軸中心として回転し、光学スケール11の信号トラックが光学センサユニット35に対して相対的に移動する。光学センサユニット35は、センサ基板23に固定されている。
【0007】
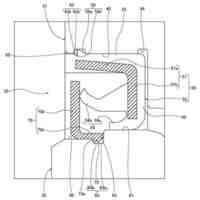
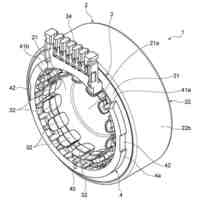
光学式エンコーダユニット31は、フレキシブル基板23FPに固定された、入出力端子であるコネクタCNTを有している。コネクタCNTは、フレキシブル基板23FPの表面又は内部に設けられた導電体の配線に電力を供給し、光学センサユニット35からの検出信号をプリアンプAMPを介して外部に出力することができる。
【0008】
センサ基板23の表面及び内部には、配線25に接続される配線及び回路が配線されており、配線25と直接又は配線25に接続される配線及び回路を介して、カバー21の内側に沿って設けられた配線24の一端が電気的に接続されている。このため、センサ基板23の表面又は内部に設けられた導電体の配線25と、カバー21の内側に沿って設けられた配線24とは、コネクタCNT、プリアンプAMP、光学センサユニット35及び光源41を適宜接続している。
【0009】
光学スケール11は、面内における偏光子の偏光方向が所定の方向を向いており、かつ偏光方向がシャフト12の回転により変化する。光学センサユニット35は、光源41の光源光が光学スケール11に透過して入射する入射光(透過光)を受光して、光学スケール11の信号トラックを読み取ることができる。光源基板42の表面には、例えば発光ダイオード、半導体レーザ光源などの光源41が固定されている。
【0010】
光学式エンコーダ2は、図3に示すように、光学式エンコーダユニット31と、演算装置3と、アクチュエータ等の制御部5と、を有する。演算装置3は、パーソナルコンピュータ等のコンピュータであり、入力インターフェース4aと、出力インターフェース4bと、CPU4cと、ROM4dと、RAM4eと、内部記憶装置4fと、を含んでいる。
光学式エンコーダユニット31は、光学センサユニット35によって、光学スケール11に光源光71が透過して入射する入射光73を検出する。
演算装置3は、光学センサユニット35の検出信号が入力され、光学式エンコーダユニット31のロータ10と光学センサユニット35との相対位置を演算し、相対位置の情報を制御信号として、モータ等の回転機械やその他アクチュエータの制御部5へ出力する。
【先行技術文献】
【特許文献】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日本精工株式会社
搬送装置
2日前
日本精工株式会社
ボールねじ
11日前
日本精工株式会社
温度検出装置
1か月前
日本精工株式会社
リニアガイド
4日前
日本精工株式会社
アクチュエータ
1か月前
日本精工株式会社
ボールねじ装置
10日前
日本精工株式会社
円すいころ軸受
1か月前
日本精工株式会社
ボールねじ装置
1か月前
日本精工株式会社
転がり案内装置
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
密封型転がり軸受
1か月前
日本精工株式会社
逆入力遮断クラッチ
1か月前
日本精工株式会社
モータ制御システム
1か月前
日本精工株式会社
磁歪式トルクセンサ
1か月前
日本精工株式会社
磁歪式トルクセンサ
2か月前
日本精工株式会社
環境配慮型機械部品
23日前
日本精工株式会社
回転センサ一体型軸受
10日前
日本精工株式会社
アクチュエータシステム
2か月前
日本精工株式会社
直動案内装置の組立方法
1か月前
日本精工株式会社
センサ付き転がり軸受装置
2日前
日本精工株式会社
ラジアルころ軸受用保持器
1か月前
日本精工株式会社
ハブユニット軸受の製造方法
1か月前
日本精工株式会社
潤滑機能付き転がり軸受装置
2か月前
日本精工株式会社
直動案内装置及びその製造方法
1か月前
日本精工株式会社
片持ち回転ローラ配置型円形車輪
1か月前
日本精工株式会社
ころ軸受及びころ軸受の設計方法
1か月前
日本精工株式会社
モータビルトイン方式の主軸装置
2日前
日本精工株式会社
ハブユニット軸受及びその製造方法
1か月前
協同油脂株式会社
グリース組成物
2か月前
日本精工株式会社
含油部材付歯車、直動アクチュエータ
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ