TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025131991
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029280
出願日
2024-02-29
発明の名称
算出方法、プログラム、及び情報処理装置
出願人
セイコーエプソン株式会社
代理人
弁理士法人旺知国際特許事務所
主分類
H04N
23/60 20230101AFI20250903BHJP(電気通信技術)
要約
【課題】プロジェクターから平面状の投射面に投射したパターンの撮像画像に基づいて当該投射面の法線ベクトルを算出する際の算出精度を向上させる。
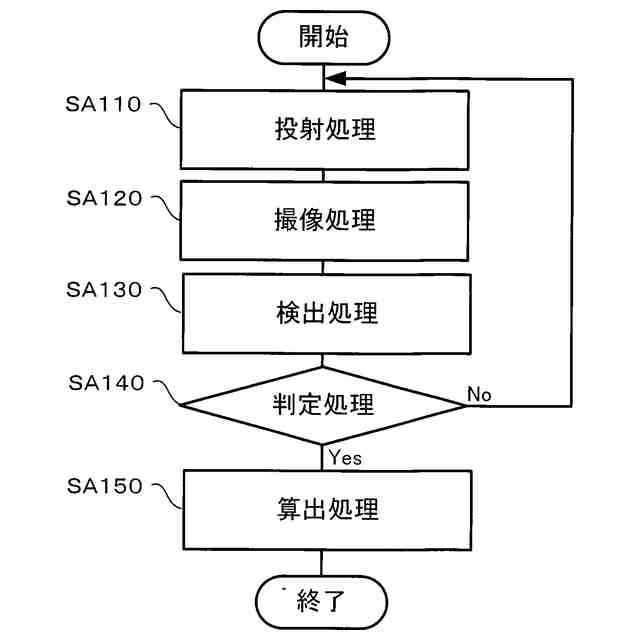
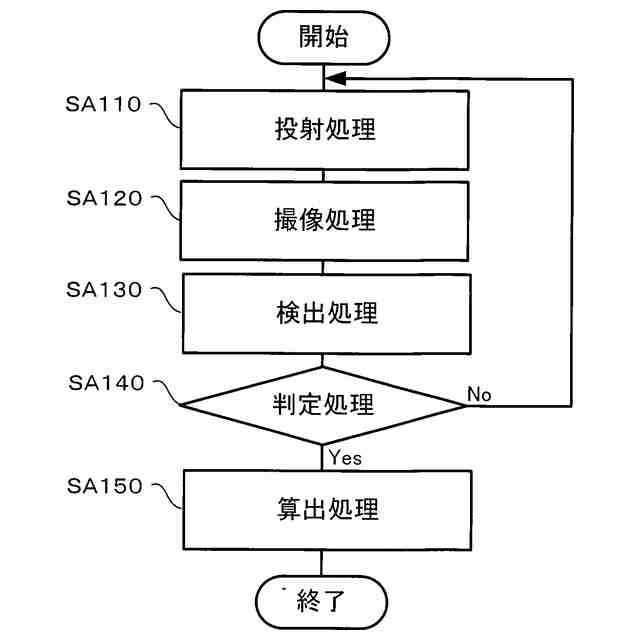
【解決手段】プロジェクターにより投射面に投射されるパターンにおいて予め設定された第1の対応点、当該パターンを投射されている投射面を2カ所以上の位置からカメラにより撮像することで得られた2以上の撮像画像の各々において第1の対応点に対応する第2の対応点、カメラの内部パラメーターの推定値、及びプロジェクターの内部パラメーターを用いて、第1の対応点と第2の対応点とを対応付ける変換行列を撮像画像毎に算出し、撮像画像毎に算出された変換行列の各々から算出される投射面の法線ベクトルを比較することにより、投射面の法線ベクトルを推定する算出処理SA150を含む算出方法を提供する。
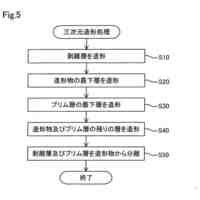
【選択図】図5
特許請求の範囲
【請求項1】
平面状の投射面に、カメラによって検出可能なパターンをプロジェクターから投射することと、
第1の位置から前記パターンを前記カメラにより撮像することで得られた第1の撮像画像に基づいて、前記第1の撮像画像の座標系を前記プロジェクターの座標系の一方から他方へ変換するための第1の変換行列を算出することと、
前記第1の位置とは異なる第2の位置から前記パターンを前記カメラにより撮像することで得られた第2の撮像画像に基づいて、前記第2の撮像画像の座標系及び前記プロジェクターの座標系の一方から他方へ変換するための第2の変換行列を算出することと、
前記第1の変換行列に基づいて算出される前記投射面の第1法線ベクトルと、前記第2の変換行列に基づいて算出される前記投射面の第2法線ベクトルと、前記カメラの内部パラメーターと、前記プロジェクターの内部パラメーターと、に基づいて、前記投射面の法線ベクトルを推定する ことと、
を含む算出方法。
続きを表示(約 1,800 文字)
【請求項2】
前記プロジェクターにより投射する画像の外形を補正するためのパラメーターを、前記推定された法線ベクトルに基づいて算出することを更に含む、請求項1に記載の算出方法。
【請求項3】
前記第1の変換行列及び前記第2の変換行列から算出される再投影誤差が最小になるように、前記カメラの内部パラメーターを推定することを更に含む、請求項1に記載の算出方法。
【請求項4】
前記投射面の法線ベクトルを推定することは、
前記推定された前記カメラの内部パラメーターを用いて算出し直された前記第1の変換行列及び前記第2の変換行列に基づき、前記法線ベクトルを推定し直すことを含む、請求項3に記載の算出方法。
【請求項5】
前記カメラは、可搬装置が備え、
前記可搬装置は、重力方向を検出するセンサーを備え、
前記投射面を正面から見たときに前記プロジェクターにより前記投射面に投射された画像の外形が長方形になり、且つ前記長方形の一辺が前記重力方向に沿うように、前記プロジェクターにより投射する画像を補正するためのパラメーター、を前記センサーにより検出された重力方向と前記推定された法線ベクトルとに基づいて算出することを更に含む、
請求項1に記載の算出方法。
【請求項6】
前記法線ベクトルを推定することは、
前記変換行列から推定される前記カメラの外部パラメーターを用いて、前記第1の撮像画像と前記第2の撮像画像とを含む複数の撮像画像のうち、撮像した位置の間の距離が閾値以上である2以上の撮像画像を選択を用いて前記法線ベクトルを推定することを含む、
請求項1に記載の算出方法。
【請求項7】
前記閾値は、前記投射面と前記プロジェクターとの間の距離に応じて定められる、請求項6に記載の算出方法。
【請求項8】
コンピューターに、
平面状の投射面に、カメラによって検出可能なパターンをプロジェクターから投射することと、
第1の位置から前記パターンを前記カメラにより撮像することで得られた第1の撮像画像に基づいて、前記第1の撮像画像の座標系を前記プロジェクターの座標系の一方から他方へ変換するための第1の変換行列を算出することと、
前記第1の位置とは異なる第2の位置から前記パターンを前記カメラにより撮像することで得られた第2の撮像画像に基づいて、前記第2の撮像画像の座標系及び前記プロジェクターの座標系の一方から他方へ変換するための第2の変換行列を算出することと、
前記第1の変換行列に基づいて算出される前記投射面の第1法線ベクトルと、前記第2の変換行列に基づいて算出される前記投射面の第2法線ベクトルと、前記カメラの内部パラメーターと、前記プロジェクターの内部パラメーターと、に基づいて、前記投射面の法線ベクトルを推定することと、
を実行させるプログラム。
【請求項9】
平面状の投射面に画像を投射するプロジェクターと通信する通信装置と、
前記プロジェクターから前記投射面に投射された画像を撮像するカメラと、
処理装置と、を備え、
前記処理装置は、
前記投射面に、前記カメラによって検出可能なパターンを前記プロジェクターから投射することと、
第1の位置から前記パターンを前記カメラにより撮像することで得られた第1の撮像画像に基づいて、前記第1の撮像画像の座標系を前記プロジェクターの座標系の一方から他方へ変換するための第1の変換行列を算出することと、
前記第1の位置とは異なる第2の位置から前記パターンを前記カメラにより撮像することで得られた第2の撮像画像に基づいて、前記第2の撮像画像の座標系及び前記プロジェクターの座標系の一方から他方へ変換するための第2の変換行列を算出することと、
前記第1の変換行列に基づいて算出される前記投射面の第1法線ベクトルと、前記第2の変換行列に基づいて算出される前記投射面の第2法線ベクトルと、前記カメラの内部パラメーターと、前記プロジェクターの内部パラメーターと、に基づいて、前記投射面の法線ベクトルを推定する ことと、
を実行する、情報処理装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、算出方法、プログラム、及び情報処理装置、に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
映像表示装置の一例として、投射スクリーン等の投射面に映像を投射することにより映像を表示するプロジェクターが挙げられる。投射面と映像表示装置との位置関係によっては、映像表示装置により対象物に表示される映像に台形歪み等の歪みが生じる場合がある。この歪みを補正する技術が種々提案されており、その一例としては特許文献1に開示の技術が挙げられる。特許文献1には、光変調器における画像を撮像部により撮像された撮像画像に射影変換する変換行列に基づいて、投射面の法線ベクトルを算出し、この法線ベクトルに基づいて歪み補正を行うプロジェクターが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2014―187515号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示の技術では、1つの変換行列から複数の法線ベクトルが解として算出される場合があり、法線ベクトルの算出精度が十分でない。
【課題を解決するための手段】
【0005】
本開示の一態様の算出方法は、平面状の投射面に、カメラによって検出可能なパターンをプロジェクターから投射することと、第1の位置から前記パターンを前記カメラにより撮像することで得られた第1の撮像画像に基づいて、前記第1の撮像画像の座標系を前記プロジェクターの座標系の一方から他方へ変換するための第1の変換行列を算出することと、前記第1の位置とは異なる第2の位置から前記パターンを前記カメラにより撮像することで得られた第2の撮像画像に基づいて、前記第2の撮像画像の座標系及び前記プロジェクターの座標系の一方から他方へ変換するための第2の変換行列を算出することと、前記第1の変換行列に基づいて算出される前記投射面の第1法線ベクトルと、前記第2の変換行列に基づいて算出される前記投射面の第2法線ベクトルと、前記カメラの内部パラメーターと、前記プロジェクターの内部パラメーターと、に基づいて、前記投射面の法線ベクトルを推定することと、を含む。
【0006】
本開示の一態様のプログラムは、コンピューターに、プロジェクターから画像を投射される平面状の投射面に、カメラによって検出可能なパターンを前記プロジェクターから投射することと、2カ所以上の位置から前記投射面を前記カメラにより撮像すること得られた2以上の撮像画像の各々から前記パターンを検出することと、前記パターンにおいて予め設定された第1の対応点、前記2以上の撮像画像の各々において前記第1の対応点に対応する第2の対応点、前記カメラの内部パラメーター、及び前記プロジェクターの内部パラメーターを用いて、前記第1の対応点と前記第2の対応点とを対応付ける変換行列を算出し、前記変換行列に基づいて前記投射面の法線ベクトルを算出することと、を実行させる。
【0007】
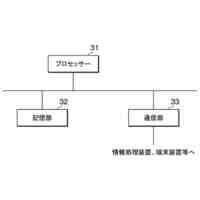
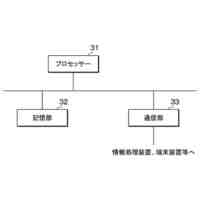
本開示の情報処理装置は、平面状の投射面に画像を投射するプロジェクターと通信する通信装置と、前記プロジェクターから前記投射面に投射された画像を撮像するカメラと、処理装置と、を備え、前記処理装置は、前記カメラによって検出可能なパターンを、前記プロジェクターから前記投射面に投射することと、2カ所以上の位置から前記投射面を前記カメラにより撮像すること得られた2以上の撮像画像の各々から前記パターンを検出することと、前記パターンにおいて予め設定された第1の対応点、前記2以上の撮像画像の各々において前記第1の対応点に対応する第2の対応点、前記カメラの内部パラメーター、及び前記プロジェクターの内部パラメーターを用いて、前記第1の対応点と前記第2の対応点とを対応付ける変換行列を算出し、前記変換行列に基づいて前記投射面の法線ベクトルを算出することと、を実行する。
【図面の簡単な説明】
【0008】
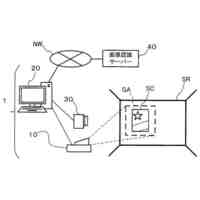
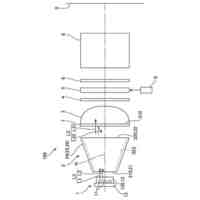
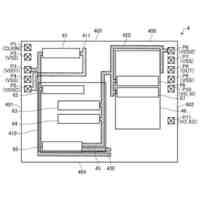
本開示の第1実施形態よる情報処理装置10Aを含む表示システム1の構成例を示す図である。
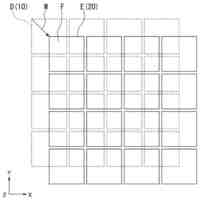
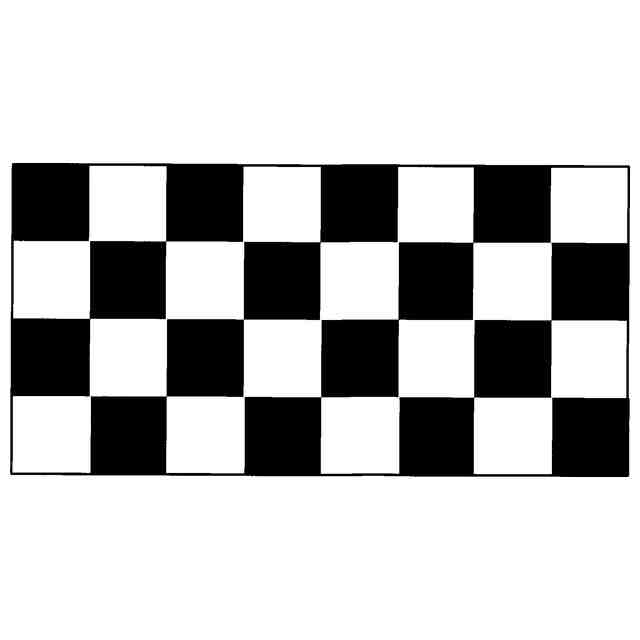
プロジェクター20から投射面SCへ投射する調整パターンの一例を示す図である。
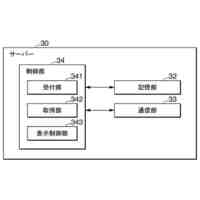
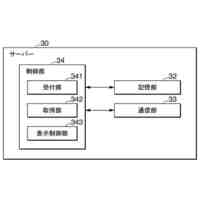
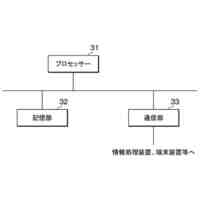
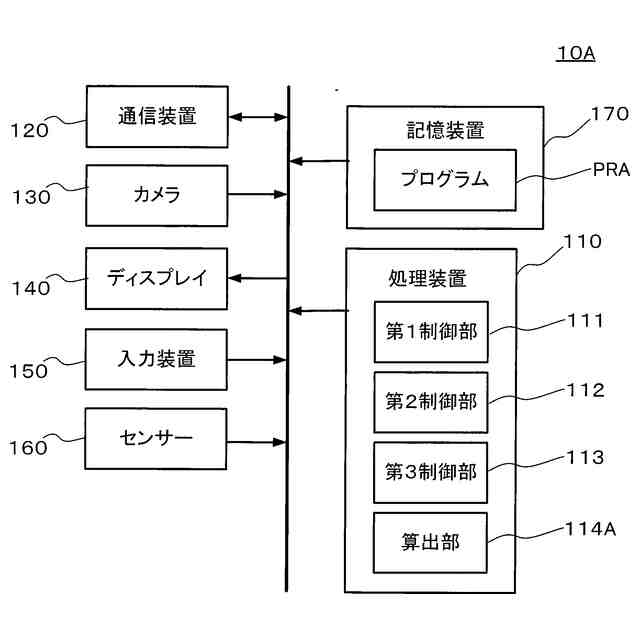
情報処理装置10Aの構成例を示す図である。
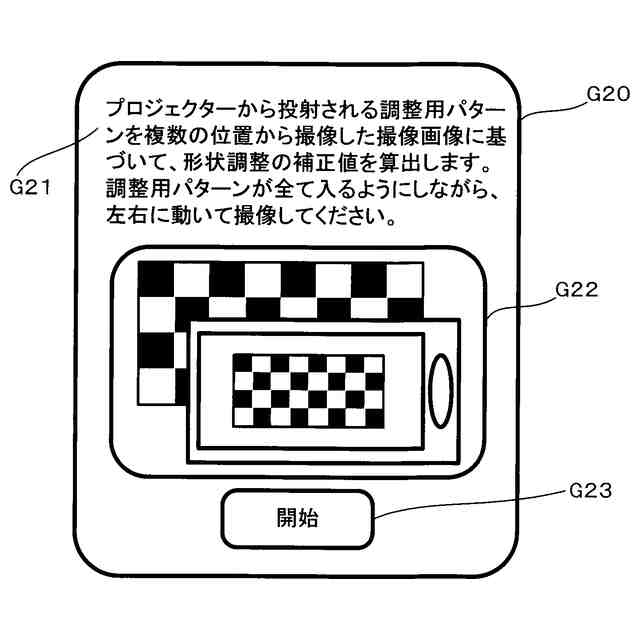
UI画面G20の一例を示す図である。
処理装置110がプログラムPRAに従って実行する算出方法における処理の流れを示すフローチャートである。
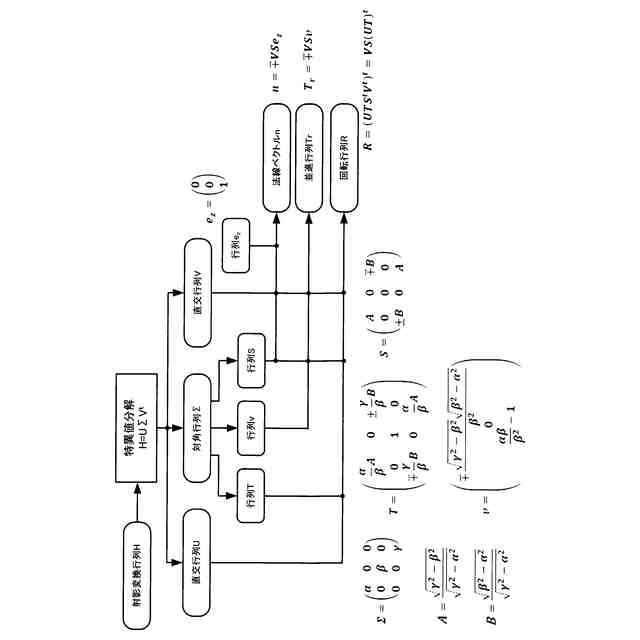
算出処理SA150の処理内容を説明するための図である。
Homography分解処理の説明図である。
カメラの内部パラメーターに誤差がない場合の法線ベクトルの算出例を示す図である。
カメラの内部パラメーターに誤差がある場合の法線ベクトルの算出例を示す図である。
本開示の第2実施形態による情報処理装置10Bの構成例を示す図である。
処理装置110がプログラムPRBに従って実行する算出方法における処理の流れを示すフローチャートである。
算出処理SB150の処理内容を説明するための図である。
【発明を実施するための形態】
【0009】
以下に述べる実施形態には技術的に好ましい種々の限定が付されている。しかし、本開示の実施形態は、以下に述べる形態に限られるものではない。
1.実施形態
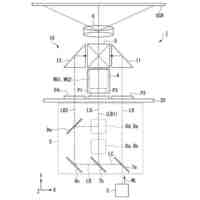
図1は、本開示の第1実施形態による情報処理装置10Aを含む表示システム1の構成例を示す図である。表示システム1は、情報処理装置10Aの他に、ネットワークNWを介して情報処理装置10Aと通信するプロジェクター20を含む。ネットワークNWの具体例としては、有線或いは無線のLAN(Local Area Network)、有線或いは無線のUSB、又はBlueTooth(登録商標)が挙げられる。
【0010】
プロジェクター20は、投射面SCに投射画像GAを投射する。本実施形態における投射面SCは、例えば表示システム1のユーザーの居室の内壁面の一つである。図1における矢印yは鉛直方向を表し、矢印xは鉛直方向に直交する2つの方向のうちの一方(以下、水平方向)を表し、ドットzは鉛直方向に直交する2つの方向のうちの他方(以下、奥行方向)を表す。プロジェクター20は、液晶パネル等、入力された画像データに応じた画像光を発生させる光変調器と、光変調器により発生させた画像光を投射面SCに導く投射レンズ等を含む光学系とを有する。また、プロジェクター20は、情報処理装置10Aから与えられる幾何補正値に従って、投射画像の歪みを補正する画像処理回路を有する。図1では、光変調器、光学系及び画像処理回路の図示は省略されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
記録装置
5日前
セイコーエプソン株式会社
表示方法
今日
セイコーエプソン株式会社
表示方法
今日
セイコーエプソン株式会社
記録装置
今日
セイコーエプソン株式会社
ロボット
今日
セイコーエプソン株式会社
記録装置
今日
セイコーエプソン株式会社
変位測定方法
今日
セイコーエプソン株式会社
繊維処理方法
5日前
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
投射型表示装置
今日
セイコーエプソン株式会社
投射型表示装置
今日
セイコーエプソン株式会社
プロジェクター
1日前
セイコーエプソン株式会社
部材の結合構造
今日
セイコーエプソン株式会社
プロジェクター
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
試料処理システム
今日
セイコーエプソン株式会社
試料撹拌システム
今日
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
センサーモジュール
今日
セイコーエプソン株式会社
三次元造形用組成物
今日
セイコーエプソン株式会社
インク容器の製造方法
今日
セイコーエプソン株式会社
表示装置及び電子機器
今日
セイコーエプソン株式会社
三次元造形物の製造方法
1日前
セイコーエプソン株式会社
集積回路装置及び発振器
1日前
セイコーエプソン株式会社
電気光学装置の製造方法
2日前
セイコーエプソン株式会社
液晶装置および電子機器
今日
セイコーエプソン株式会社
可動装置およびロボット
5日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ