TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132227
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029636
出願日
2024-02-29
発明の名称
センサーモジュール
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
19/5783 20120101AFI20250903BHJP(測定;試験)
要約
【課題】振動漏れを抑制することのできるセンサーモジュールを提供すること。
【解決手段】センサーモジュールは、第1駆動周波数で駆動する第1慣性センサーと、第1駆動周波数と異なる第2駆動周波数で駆動する第2慣性センサーと、第1、第2慣性センサーが搭載されている基板と、を有するセンサー基板と、第1、第2慣性センサーを覆うケースと、ケースとセンサー基板との間に充填され、かつ、第1、第2慣性センサーの少なくとも一部ずつを覆っている充填部材と、を有する。そして、充填部材は、損失係数の半値全幅の範囲内に第1駆動周波数を含む第1充填部材と、損失係数の半値全幅の範囲内に第2駆動周波数を含む第2充填部材と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
第1駆動周波数で駆動する第1慣性センサーと、前記第1駆動周波数と異なる第2駆動周波数で駆動する第2慣性センサーと、前記第1慣性センサーおよび前記第2慣性センサーが搭載されている基板と、を有するセンサー基板と、
前記第1慣性センサーおよび前記第2慣性センサーを覆うケースと、
前記ケースと前記センサー基板との間に充填され、かつ、前記第1慣性センサーおよび前記第2慣性センサーの少なくとも一部ずつを覆っている充填部材と、を有し、
前記充填部材は、損失係数の半値全幅の範囲内に前記第1駆動周波数を含む第1充填部材と、損失係数の半値全幅の範囲内に前記第2駆動周波数を含む第2充填部材と、を有することを特徴とするセンサーモジュール。
続きを表示(約 1,100 文字)
【請求項2】
前記第1充填部材は、損失係数の半値半幅の範囲内に前記第1駆動周波数を含み、
前記第2充填部材は、損失係数の半値半幅の範囲内に前記第2駆動周波数を含む請求項1に記載のセンサーモジュール。
【請求項3】
前記第1充填部材および前記第2充填部材は、前記基板の厚さ方向に積層されている請求項1に記載のセンサーモジュール。
【請求項4】
前記第2充填部材および前記第1充填部材のうち、前記基板側に位置する一方は、前記第1慣性センサーおよび前記第2慣性センサーと接触し、前記基板と反対側に位置する他方は、前記第1慣性センサーおよび前記第2慣性センサーと非接触である請求項3に記載のセンサーモジュール。
【請求項5】
前記ケースは、前記基板を載置する載置面と、前記載置面から凹没し、前記第1慣性センサーおよび前記第2慣性センサーの少なくとも一部ずつを収容している凹部と、を有し、
前記凹部に前記充填部材が充填されている請求項4に記載のセンサーモジュール。
【請求項6】
前記第1充填部材は、前記第1慣性センサーと接触し、
前記第2充填部材は、前記第2慣性センサーと接触している請求項1に記載のセンサーモジュール。
【請求項7】
前記第1充填部材は、前記第2慣性センサーと非接触であり、
前記第2充填部材は、前記第1慣性センサーと非接触である請求項6に記載のセンサーモジュール。
【請求項8】
前記ケースは、前記基板を載置する載置面と、前記載置面から凹没し、前記第1慣性センサーおよび前記第2慣性センサーの少なくとも一部ずつを収容している凹部と、を有し、
前記凹部は、前記第1慣性センサーの少なくとも一部を収容している第1凹部と、前記第1凹部と分離して形成され、前記第2慣性センサーの少なくとも一部を収容している第2凹部と、を有し、
前記第1凹部に前記第1充填部材が充填され、
前記第2凹部に前記第2充填部材が充填されている請求項7に記載のセンサーモジュール。
【請求項9】
前記センサー基板は、さらに、前記基板に搭載され、前記第1駆動周波数および前記第2駆動周波数と異なる第3駆動周波数で駆動する第3慣性センサーを有し、
前記充填部材は、前記第3慣性センサーの少なくとも一部を覆い、
前記充填部材は、損失係数の半値全幅の範囲内に前記第3駆動周波数を含む第3充填部材を有する請求項1に記載のセンサーモジュール。
【請求項10】
前記第3充填部材は、損失係数の半値半幅の範囲内に前記第3駆動周波数を含む請求項9に記載のセンサーモジュール。
発明の詳細な説明
【技術分野】
【0001】
本発明は、センサーモジュールに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1に記載された慣性計測装置は、インナーケースと、インナーケースの下面に搭載されたセンサー基板と、インナーケースに被せられ、インナーケースとの間にセンサー基板を収容するアウターケースと、を有する。また、センサー基板は、基板と、基板の上面に実装されたZ軸角速度センサーおよび加速度センサーと、基板の側面に実装されたX軸角速度センサーおよびY軸角速度センサーと、を有する。
【0003】
また、インナーケースの下面には凹部が形成されており、この凹部と重なる位置にX軸、Y軸、Z軸角速度センサーおよび加速度センサーが配置されている。また、凹部には充填部材が充填され、この充填部材によって、Z軸角速度センサーおよび加速度センサーの全域が封止され、X軸角速度センサーおよびY軸角速度センサーの上側半分が封止されている。
【0004】
特許文献1の慣性計測装置では、充填部材を配置することにより、外部からのノイズ振動の影響を低減し、検出精度の安定性を高めている。
【先行技術文献】
【特許文献】
【0005】
特開2017-020829号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1の慣性計測装置では、X軸角速度センサー、Y軸角速度センサーおよびZ軸角速度センサーの振動が充填部材を介して装置外に漏れ易いという問題がある。
【課題を解決するための手段】
【0007】
本発明のセンサーモジュールは、第1駆動周波数で駆動する第1慣性センサーと、前記第1駆動周波数と異なる第2駆動周波数で駆動する第2慣性センサーと、前記第1慣性センサーおよび前記第2慣性センサーが搭載されている基板と、を有するセンサー基板と、
前記第1慣性センサーおよび前記第2慣性センサーを覆うケースと、
前記ケースと前記センサー基板との間に充填され、かつ、前記第1慣性センサーおよび前記第2慣性センサーの少なくとも一部ずつを覆っている充填部材と、を有し、
前記充填部材は、損失係数の半値全幅の範囲内に前記第1駆動周波数を含む第1充填部材と、損失係数の半値全幅の範囲内に前記第2駆動周波数を含む第2充填部材と、を有する。
【図面の簡単な説明】
【0008】
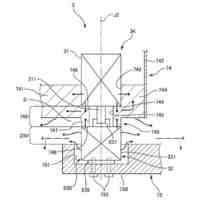
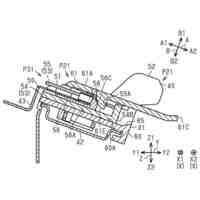
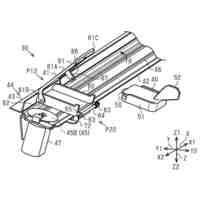
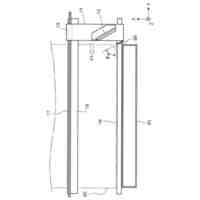
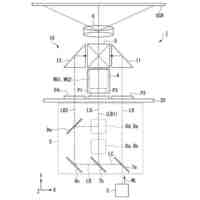
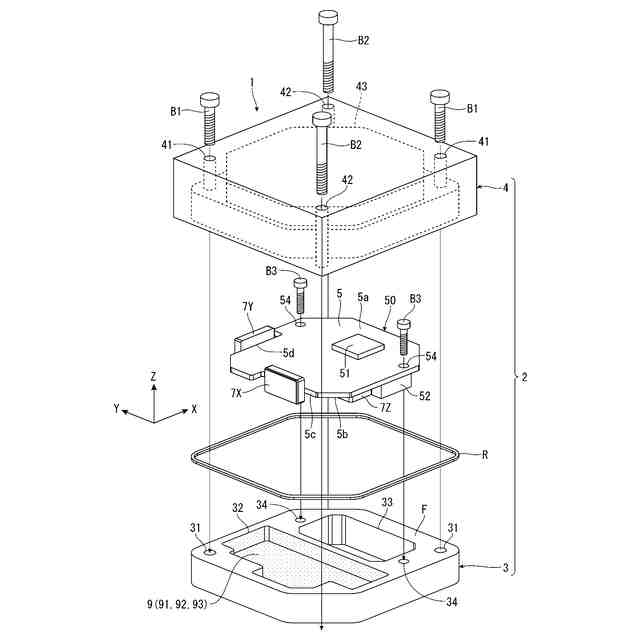
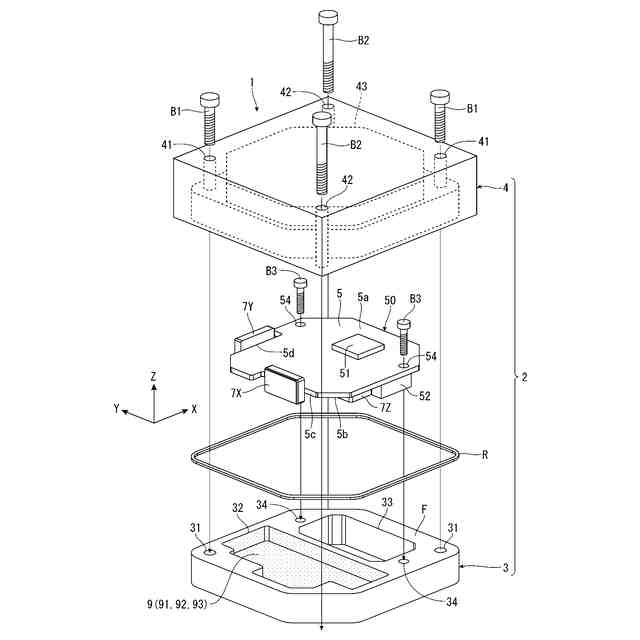
第1実施形態に係るセンサーモジュールを示す分解斜視図である。
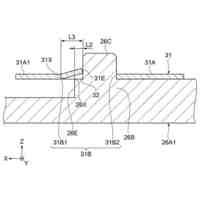
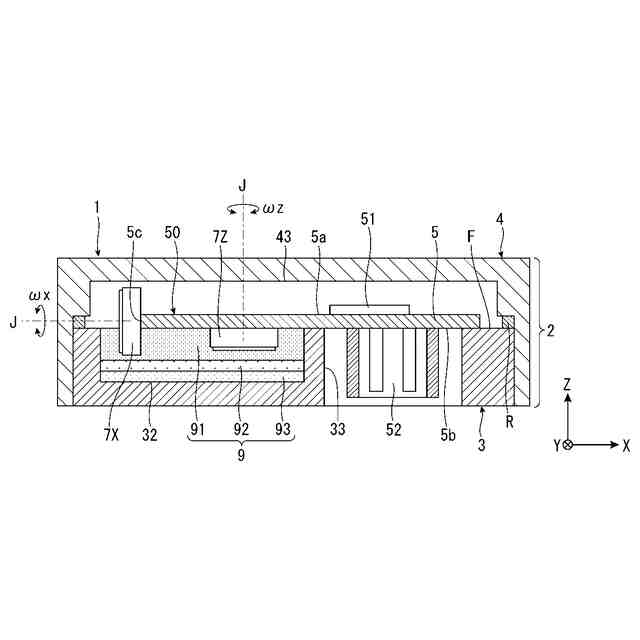
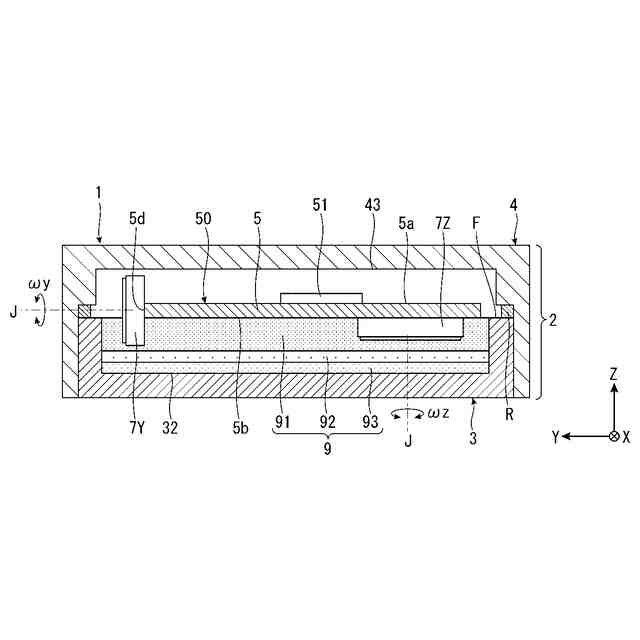
センサーモジュールをY軸方向マイナス側から見た断面図である。
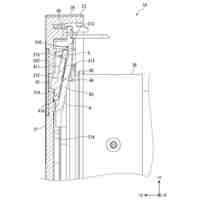
センサーモジュールをX軸方向マイナス側から見た断面図である。
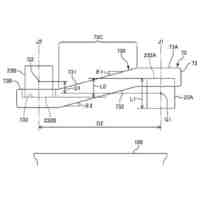
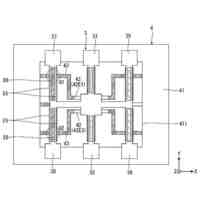
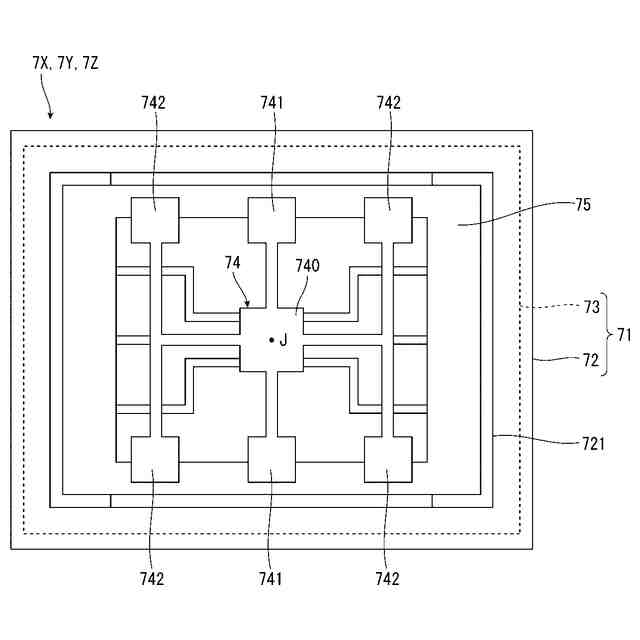
角速度センサーを示す平面図である。
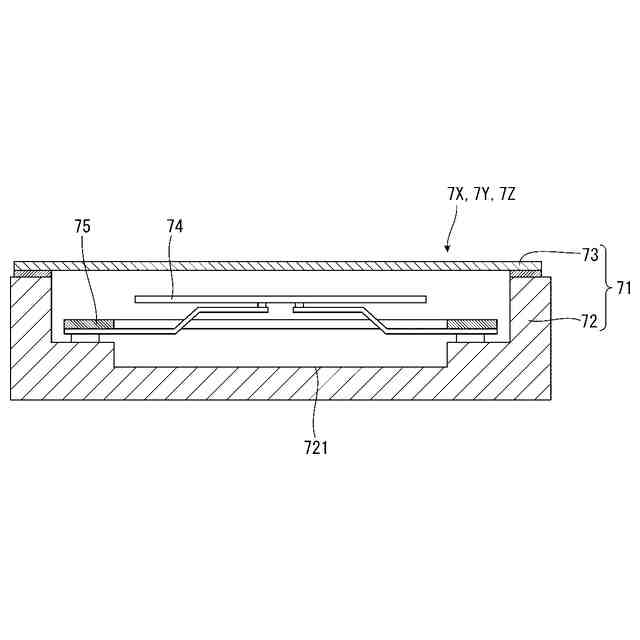
角速度センサーを示す断面図である。
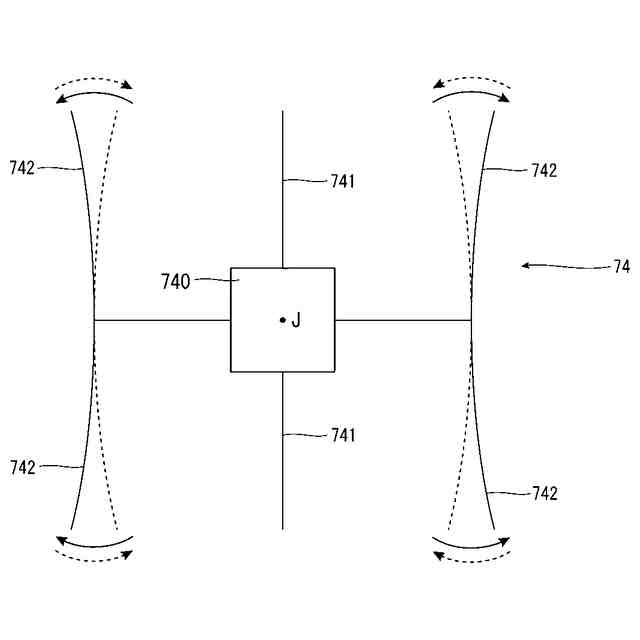
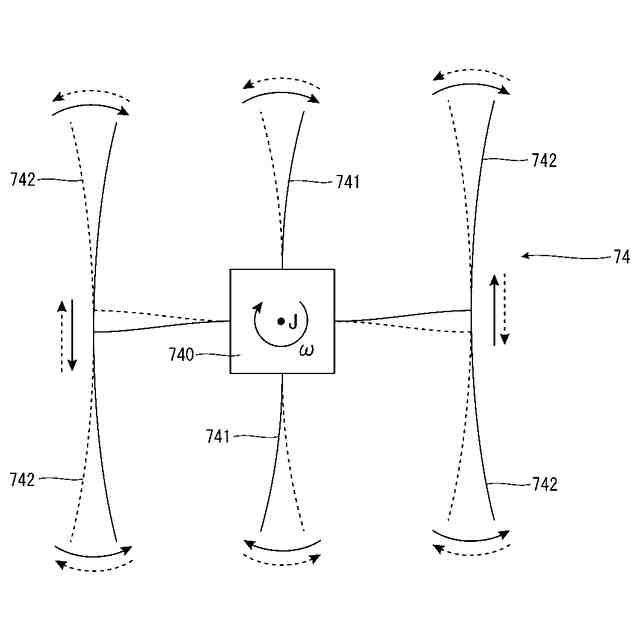
角速度センサーの駆動状態を示す模式図である。
角速度センサーの駆動状態を示す模式図である。
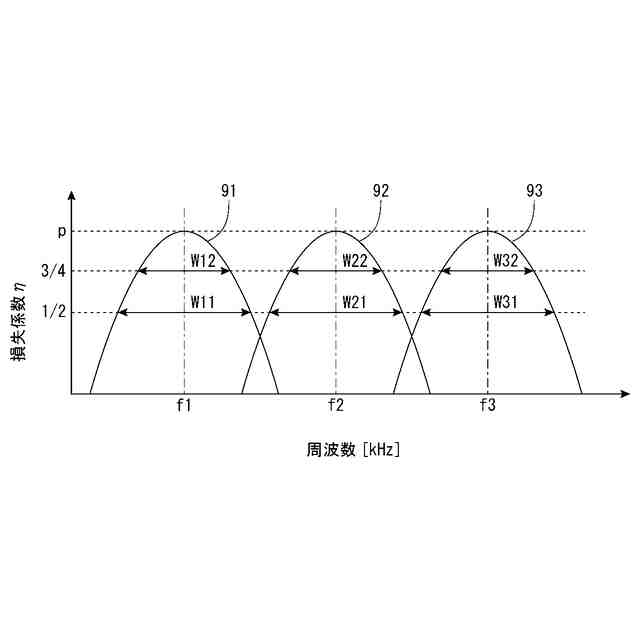
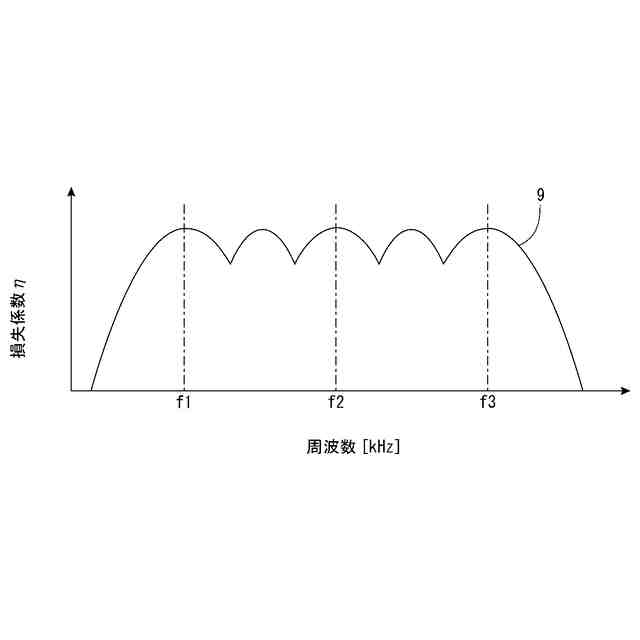
損失係数ηと周波数との関係を示すグラフである。
損失係数ηと周波数との関係を示すグラフである。
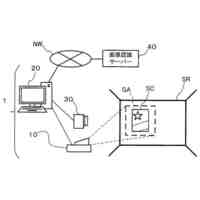
1つの基板に複数のセンサーモジュールを搭載した様子を示す図である。
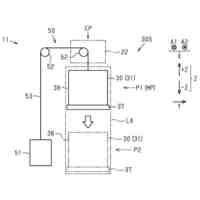
センサーモジュールの製造工程を示すフローチャートである。
センサーモジュールの製造方法を説明するための断面図である。
センサーモジュールの製造方法を説明するための断面図である。
センサーモジュールの製造方法を説明するための断面図である。
センサーモジュールの製造方法を説明するための断面図である。
センサーモジュールの製造方法を説明するための断面図である。
図1に示すセンサーモジュールの変形例を示す断面図である。
図1に示すセンサーモジュールの変形例を示す断面図である。
図1に示すセンサーモジュールの変形例を示す断面図である。
第2実施形態に係るセンサーモジュールを示す分解斜視図である。
センサーモジュールをY軸方向マイナス側から見た断面図である。
センサーモジュールをX軸方向マイナス側から見た断面図である。
センサーモジュールの製造工程を示すフローチャートである。
センサーモジュールの製造方法を説明するための断面図である。
センサーモジュールの製造方法を説明するための断面図である。
センサーモジュールの製造方法を説明するための断面図である。
第3実施形態に係るセンサーモジュールの内部を示すZ軸方向プラス側から見た断面図である。
第4実施形態に係るセンサーモジュールを示す分解斜視図である。
センサーモジュールをY軸方向マイナス側から見た断面図である。
【発明を実施するための形態】
【0009】
以下、本発明のセンサーモジュールを添付図面に示す実施形態に基づいて詳細に説明する。なお、説明の便宜上、図11および図23を除く各図には、互いに直交する3軸をX軸、Y軸およびZ軸として図示している。また、以下では、説明の便宜上、X軸と平行な方向を「X軸方向」とも言い、Y軸と平行な方向を「Y軸方向」とも言い、Z軸と平行な方向を「Z軸方向」とも言う。また、Z軸方向の矢印側を「上」、反対側を「下」とも言う。
【0010】
<第1実施形態>
図1は、第1実施形態に係るセンサーモジュールを示す分解斜視図である。図2は、センサーモジュールをY軸方向マイナス側から見た断面図である。図3は、センサーモジュールをX軸方向マイナス側から見た断面図である。図4は、角速度センサーを示す平面図である。図5は、角速度センサーを示す断面図である。図6および図7は、それぞれ、角速度センサーの駆動状態を示す模式図である。図8および図9は、それぞれ、損失係数ηと周波数との関係を示すグラフである。図10は、1つの基板に複数のセンサーモジュールを搭載した様子を示す図である。図11は、センサーモジュールの製造工程を示すフローチャートである。図12ないし図16は、それぞれ、センサーモジュールの製造方法を説明するための断面図である。図17ないし図19は、それぞれ、図1に示すセンサーモジュールの変形例を示す断面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
セイコーエプソン株式会社
ロボット
今日
セイコーエプソン株式会社
記録装置
7日前
セイコーエプソン株式会社
表示方法
今日
セイコーエプソン株式会社
表示方法
今日
セイコーエプソン株式会社
記録装置
5日前
セイコーエプソン株式会社
記録装置
12日前
セイコーエプソン株式会社
ロボット
9日前
セイコーエプソン株式会社
印刷装置
7日前
セイコーエプソン株式会社
記録装置
今日
セイコーエプソン株式会社
記録装置
今日
セイコーエプソン株式会社
繊維処理方法
5日前
セイコーエプソン株式会社
振動デバイス
9日前
セイコーエプソン株式会社
液体吐出装置
8日前
セイコーエプソン株式会社
液体吐出装置
8日前
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
変位測定方法
今日
セイコーエプソン株式会社
液体吐出装置
今日
セイコーエプソン株式会社
プロジェクター
9日前
セイコーエプソン株式会社
部材の結合構造
今日
セイコーエプソン株式会社
プロジェクター
1日前
セイコーエプソン株式会社
プロジェクター
1日前
セイコーエプソン株式会社
角速度センサー
9日前
セイコーエプソン株式会社
投射型表示装置
今日
セイコーエプソン株式会社
投射型表示装置
今日
セイコーエプソン株式会社
プロジェクター
今日
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
水性粘着剤組成物
9日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
成形管理システム
1日前
セイコーエプソン株式会社
試料撹拌システム
今日
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ