TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025132218
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029627
出願日
2024-02-29
発明の名称
試料撹拌システム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01N
1/38 20060101AFI20250903BHJP(測定;試験)
要約
【課題】十分な撹拌を行うことのできる試料撹拌システムを提供すること。
【解決手段】試料撹拌システムは、試料が供給されたサンプル容器を把持するハンドが装着されているロボットアームを備えるロボットと、前記サンプル容器に蓋を装着する蓋閉め装置と、を有し、前記ロボットは、前記蓋閉め装置によって前記蓋が装着された前記サンプル容器を前記ハンドで把持し、前記ロボットアームを動かして前記サンプル容器を振ることにより、前記サンプル容器内の前記試料を撹拌する。
【選択図】図10
特許請求の範囲
【請求項1】
試料が供給されたサンプル容器を把持するハンドが装着されているロボットアームを備えるロボットと、
前記サンプル容器に蓋を装着する蓋閉め装置と、を有し、
前記ロボットは、前記蓋閉め装置によって前記蓋が装着された前記サンプル容器を前記ハンドで把持し、前記ロボットアームを動かして前記サンプル容器を振ることにより、前記サンプル容器内の前記試料を撹拌することを特徴とする試料撹拌システム。
続きを表示(約 820 文字)
【請求項2】
前記蓋は、螺合によって前記サンプル容器に装着され、
前記蓋閉め装置は、前記サンプル容器に対して前記蓋を回転させることにより、前記サンプル容器に前記蓋を装着する請求項1に記載の試料撹拌システム。
【請求項3】
前記ロボットは、前記ハンドで把持したピペットを用いて液体の前記試料を前記サンプル容器に吐出することにより、前記サンプル容器に前記試料を供給する請求項1に記載の試料撹拌システム。
【請求項4】
前記ロボットは、前記吐出の際にタッチオフを行う請求項3に記載の試料撹拌システム。
【請求項5】
前記ロボットは、前記サンプル容器を振ることにより、前記タッチオフによって前記サンプル容器の内壁に付着した前記試料の液滴を回収する請求項4に記載の試料撹拌システム。
【請求項6】
前記ロボットは、前記サンプル容器を鉛直方向に振ることにより、前記サンプル容器内の前記試料を撹拌する請求項5に記載の試料撹拌システム。
【請求項7】
前記ロボットアームは、曲げ関節を有し、
前記曲げ関節を動かすことにより、前記サンプル容器を振る請求項6に記載の試料撹拌システム。
【請求項8】
前記ロボットは、前記サンプル容器を繰り返し反転させて、前記サンプル容器内の試料を撹拌する請求項5に記載の試料撹拌システム。
【請求項9】
前記ロボットアームは、捩り関節を有し、
前記捩り関節を動かすことにより、前記サンプル容器を前記反転させる請求項8に記載の試料撹拌システム。
【請求項10】
前記ロボットは、前記吐出を行う前に、前記試料が貯留された試料容器を前記ハンドで把持し、前記ロボットアームを動かして前記試料容器を振ることにより、前記試料容器内の前記試料を撹拌する請求項1に記載の試料撹拌システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、試料撹拌システムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
特許文献1に記載された混錬システムは、粉体材料が供給された容器を把持すると共に当該容器に蓋をするハンドが装着されたロボットアームを備えるロボットを有する。そして、ハンドで容器を把持すると共に当該容器に蓋をした状態で、ロボットアームを動かすことにより、容器内の粉体を撹拌する。
【先行技術文献】
【特許文献】
【0003】
特開2020-044487号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このような構成の混錬システムでは、ハンドが容器を把持すると共に当該容器に蓋をする構成となっているため、例えば、ハンドによる容器の把持位置がずれてしまうと、容器に蓋がされなかったり、撹拌時の振動によって容器から蓋が外れてしまったりするおそれがある。そのため、容器内の粉体材料の撹拌を十分に行うことができないおそれがある。
【課題を解決するための手段】
【0005】
本発明の試料撹拌システムは、試料が供給されたサンプル容器を把持するハンドが装着されているロボットアームを備えるロボットと、
前記サンプル容器に蓋を装着する蓋閉め装置と、を有し、
前記ロボットは、前記蓋閉め装置によって前記蓋が装着された前記サンプル容器を前記ハンドで把持し、前記ロボットアームを動かして前記サンプル容器を振ることにより、前記サンプル容器内の前記試料を撹拌する。
【図面の簡単な説明】
【0006】
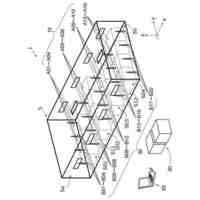
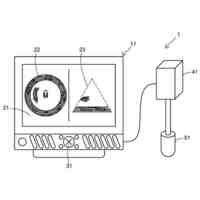
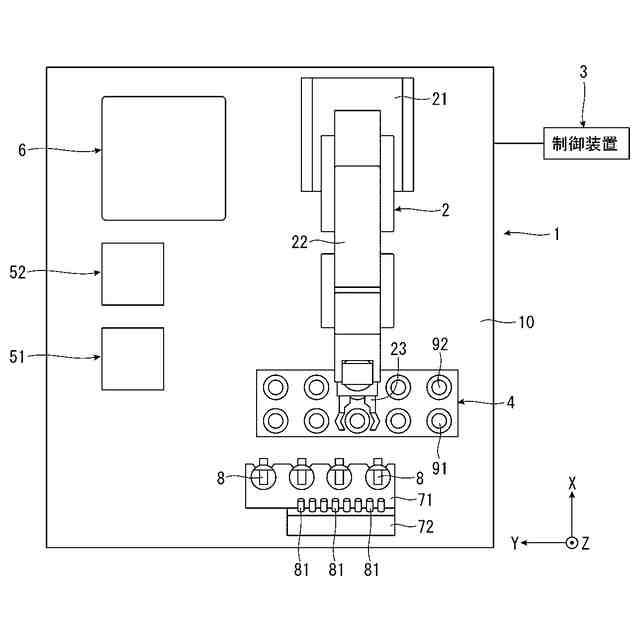
第1実施形態に係る試料撹拌システムの全体を示す上面図である。
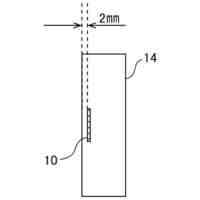
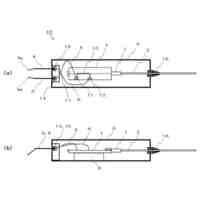
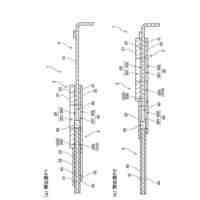
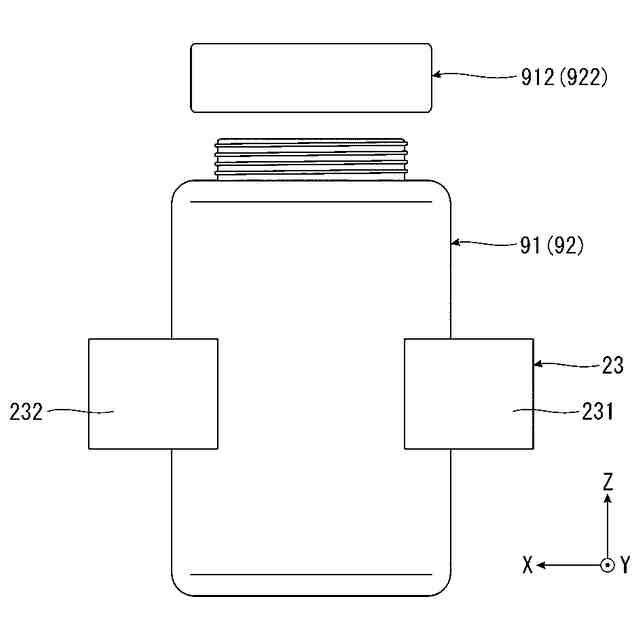
試料容器およびサンプル容器を示す側面図である。
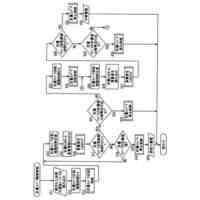
調合作業の工程を示すフローチャートである。
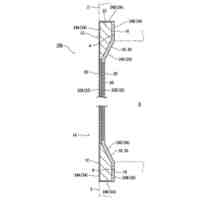
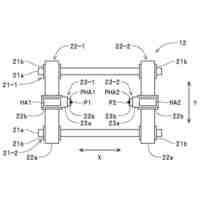
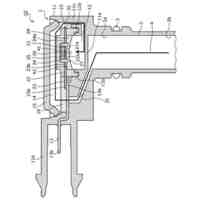
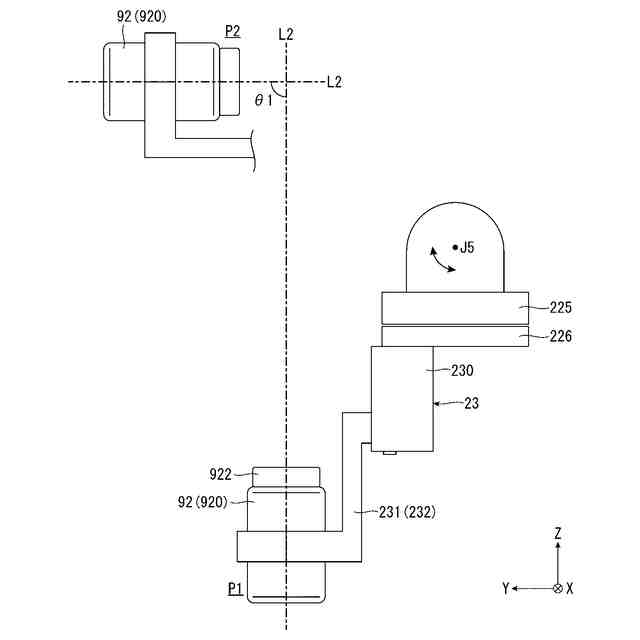
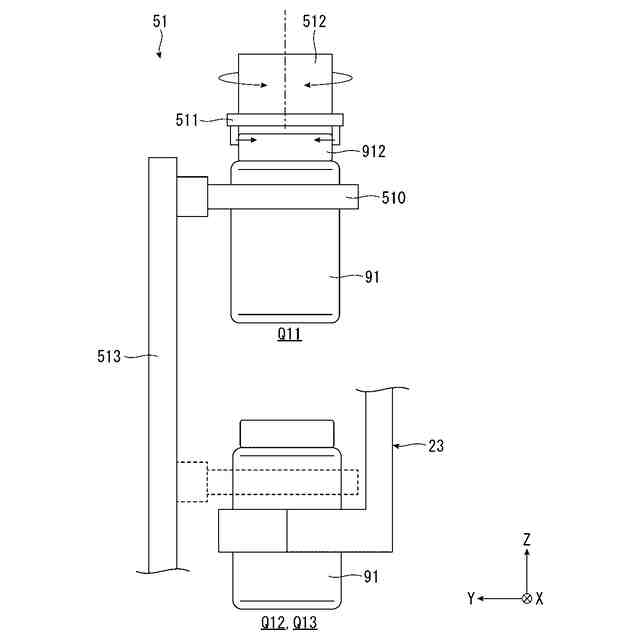
第1蓋開閉装置を示す側面図である。
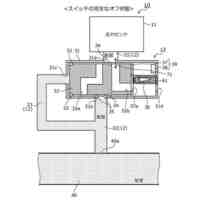
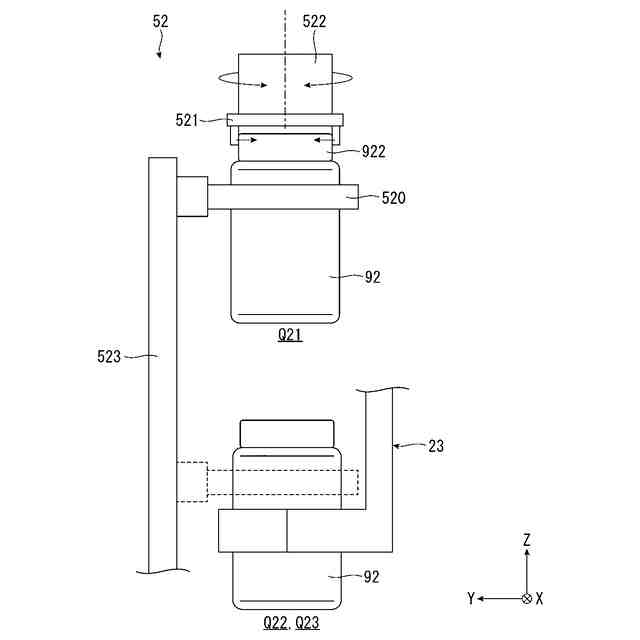
第2蓋開閉装置を示す側面図である。
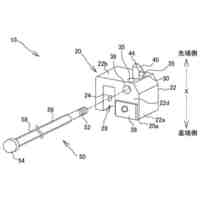
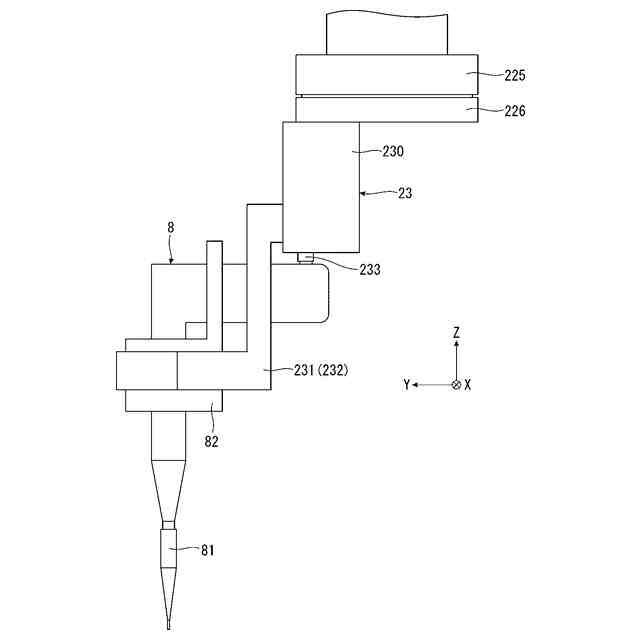
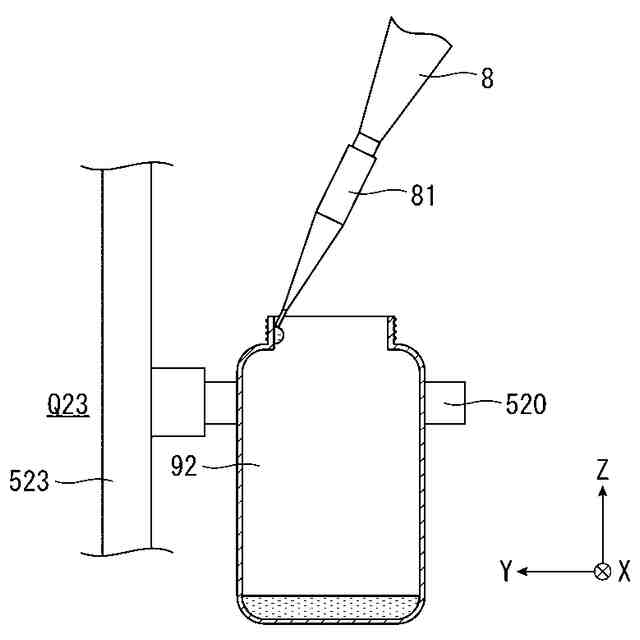
ピペットを示す側面図である。
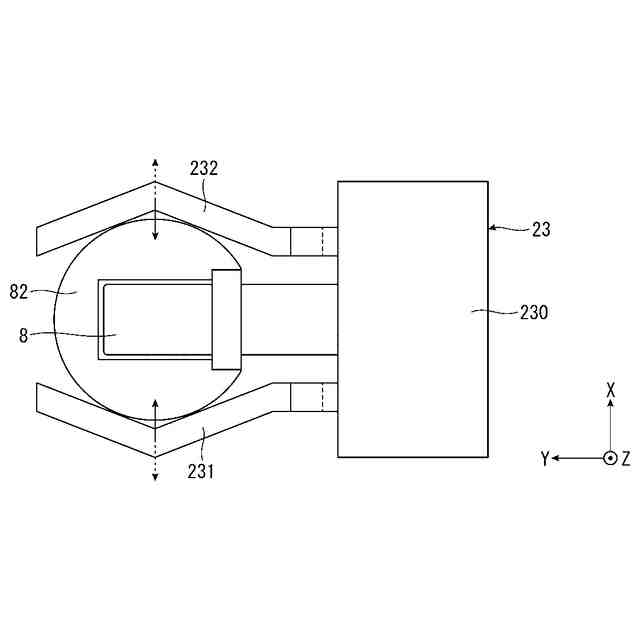
ピペットを示す上面図である。
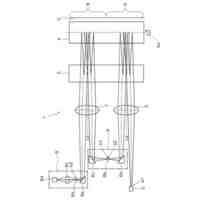
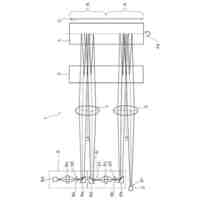
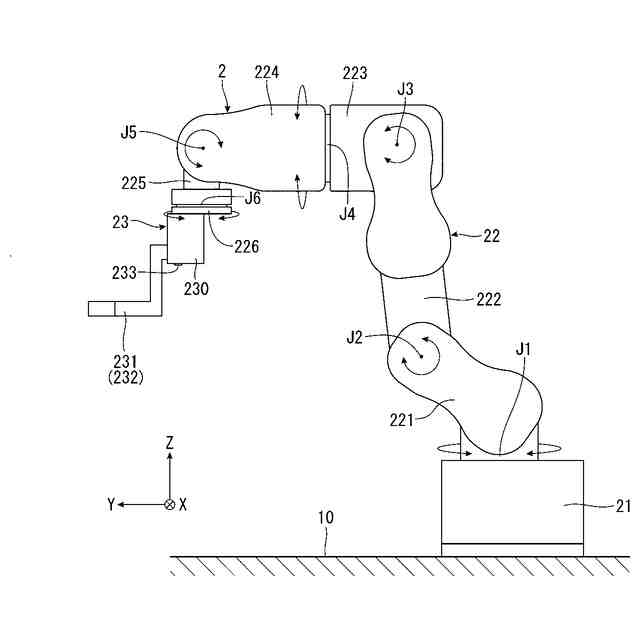
ロボットを示す側面図である。
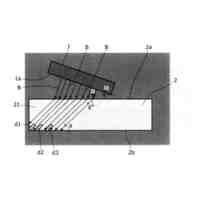
タッチオフの様子を示す断面図である。
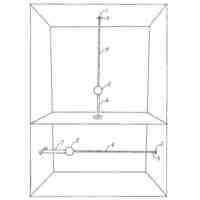
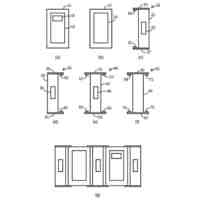
サンプル容器を振って、サンプル容器内の液体試料を撹拌する様子を示す側面図である。
サンプル容器を振って、サンプル容器内の液体試料を撹拌する様子を示す側面図である。
サンプル容器を振って、サンプル容器内の液体試料を撹拌する様子を示す側面図である。
試料容器を振って、試料容器内の液体試料を撹拌する様子を示す側面図である。
第2実施形態に係る試料撹拌システムのロボットが備えるハンドを示す側面図である。
サンプル容器を振って、サンプル容器内の液体試料を撹拌する様子を示す側面図である。
サンプル容器を振って、サンプル容器内の液体試料を撹拌する様子を示す側面図である。
第3実施形態に係る試料撹拌システムのロボットを示す側面図である。
【発明を実施するための形態】
【0007】
以下、本発明の試料撹拌システムを添付図面に示す実施形態に基づいて詳細に説明する。なお、図3を除く各図には、説明の便宜上、互いに直交する3軸であるX軸、Y軸およびZ軸を図示している。そして、Z軸が鉛直方向に沿い、X軸およびY軸が水平方向に沿っている。また、以下では、X軸に沿う方向をX軸方向とも言い、Y軸に沿う方向をY軸方向と言い、Z軸に沿う方向をZ軸方向とも言う。
【0008】
<第1実施形態>
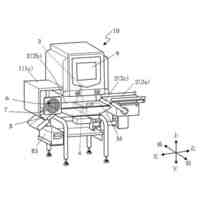
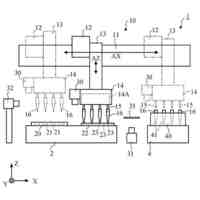
図1は、第1実施形態に係る試料撹拌システムの全体を示す上面図である。図2は、試料容器およびサンプル容器を示す側面図である。図3は、調合作業の工程を示すフローチャートである。図4は、第1蓋開閉装置を示す側面図である。図5は、第2蓋開閉装置を示す側面図である。図6は、ピペットを示す側面図である。図7は、ピペットを示す上面図である。図8は、ロボットを示す側面図である。図9は、タッチオフの様子を示す断面図である。図10ないし図12は、それぞれ、サンプル容器を振って、サンプル容器内の液体試料を撹拌する様子を示す側面図である。図13は、試料容器を振って、試料容器内の液体試料を撹拌する様子を示す側面図である。
【0009】
図1に示す試料撹拌システム1は、液体試料の撹拌を自動で行うシステムである。特に、本実施形態の試料撹拌システム1は、複数種類の液体試料を自動分注してサンプルを調合するシステムであり、ロボット2が、主に、ピペット8を用いて試料容器91内に貯留された液体試料を所定量だけ吸入する作業と、吸入した液体試料をサンプル容器92に吐出する作業と、サンプル容器92を振ってサンプル容器92内の液体試料を撹拌する作業と、を自動で行う。ただし、試料撹拌システム1が行う処理は、特に限定されない。
【0010】
このような試料撹拌システム1は、図1に示すように、試料容器91およびサンプル容器92を載置する載置台4と、液体試料の分注や撹拌を行うロボット2と、試料容器91の蓋912を開閉する第1蓋開閉装置51と、サンプル容器92の蓋922を開閉する蓋閉め装置としての第2蓋開閉装置52と、空のサンプル容器92の重さ、サンプル容器92に吐出された液体試料の実際の重さ等を計測する電子天秤6と、ピペット8を載置するピペット立て71と、ピペット8の先端に装着されるチップ81を載置するチップ立て72と、各部の駆動を制御する制御装置3と、を有し、これらがベース10の所定箇所にそれぞれ配置されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量スプーン
1日前
個人
微小振動検出装置
12日前
株式会社イシダ
X線検査装置
12日前
ユニパルス株式会社
力変換器
1か月前
横浜ゴム株式会社
音響窓
1か月前
三菱電機株式会社
計測器
27日前
株式会社辰巳菱機
システム
21日前
日置電機株式会社
測定装置
1か月前
個人
センサーを備えた装置
1か月前
日本精機株式会社
施工管理システム
1か月前
IPU株式会社
距離検出装置
1か月前
株式会社東芝
センサ
1か月前
ダイハツ工業株式会社
測定用具
5日前
株式会社FRPカジ
FRP装置
23日前
アンリツ株式会社
分光器
7日前
アンリツ株式会社
分光器
7日前
株式会社東芝
センサ
12日前
TDK株式会社
磁気センサ
8日前
TDK株式会社
磁気センサ
1日前
株式会社精工技研
光電圧プローブ
13日前
TDK株式会社
ガスセンサ
15日前
株式会社CAST
センサ固定治具
1か月前
日本精工株式会社
分注装置
19日前
富士レビオ株式会社
嵌合システム
26日前
株式会社カワタ
サンプリング装置
16日前
大和製衡株式会社
組合せ計量装置
23日前
学校法人立命館
液面レベルセンサ
20日前
株式会社ヨコオ
コンタクタ
5日前
株式会社熊平製作所
刃物類判別装置
1か月前
日本碍子株式会社
ガスセンサ
2日前
本多電子株式会社
超音波ソナー装置
28日前
大同特殊鋼株式会社
超音波探傷方法
1日前
富士電機株式会社
半導体パッケージ
1日前
富士電機株式会社
半導体パッケージ
29日前
アズビル株式会社
火炎状態判定装置
1か月前
個人
材料特性パラメータの算定方法
1日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ