TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025132221
公報種別
公開特許公報(A)
公開日
2025-09-10
出願番号
2024029630
出願日
2024-02-29
発明の名称
変位測定方法
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
3/06 20060101AFI20250903BHJP(測定;試験)
要約
【課題】変位デバイスに蓋がされている場合でも変位デバイスの変位を測定可能な技術を提供する。
【解決手段】測定対象物の変位を測定する変位測定方法は、(a)測定対象物に対して赤外線カメラを第1周波数で第1距離、往復移動させつつ赤外線カメラによって測定対象物を撮影し、測定対象物が発する赤外線から第1信号強度を求める工程と、(b)測定対象物が第2周波数で繰り返し変位するように測定対象物を駆動させつつ赤外線カメラによって測定対象物を撮影し、測定対象物が発する赤外線から第2信号強度を求める工程と、(c)第1距離と、第1信号強度と、第2信号強度とを用いて、測定対象物の変位量である第2距離を求める工程と、を含む。
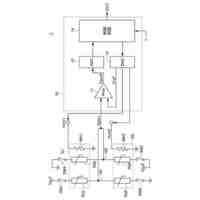
【選択図】図3
特許請求の範囲
【請求項1】
測定対象物の変位を測定する変位測定方法であって、
(a)前記測定対象物に対して赤外線カメラを第1周波数で第1距離、往復移動させつつ前記赤外線カメラによって前記測定対象物を撮影し、前記測定対象物が発する赤外線から第1信号強度を求める工程と、
(b)前記測定対象物が第2周波数で繰り返し変位するように前記測定対象物を駆動させつつ前記赤外線カメラによって前記測定対象物を撮影し、前記測定対象物が発する赤外線から第2信号強度を求める工程と、
(c)前記第1距離と、前記第1信号強度と、前記第2信号強度とを用いて、前記測定対象物の変位量である第2距離を求める工程と、
を含む変位測定方法。
続きを表示(約 630 文字)
【請求項2】
請求項1に記載の変位測定方法であって、
前記第1信号強度は、前記赤外線カメラによって撮影された前記赤外線の信号から前記第1周波数を有する信号を抽出するロックイン処理を行って得られる値であり、
前記第2信号強度は、前記赤外線カメラによって撮影された前記赤外線の信号から前記第2周波数を有する信号を抽出するロックイン処理を行って得られる値である、変位測定方法。
【請求項3】
請求項1に記載の変位測定方法であって、
前記第1距離を複数回変更し、前記第1距離と前記第1信号強度との相関関係を求める工程を含む、変位測定方法。
【請求項4】
請求項3に記載の変位測定方法であって、
前記工程(c)では、前記相関関係に基づいて、前記第2信号強度から前記第2距離を求める、変位測定方法。
【請求項5】
請求項1に記載の変位測定方法であって、
前記第2距離は、1μm以下である、変位測定方法。
【請求項6】
請求項1に記載の変位測定方法であって、
(d)前記工程(c)において求められた前記第2距離と、前記第2信号強度との対応関係を表示する工程、を含む変位測定方法。
【請求項7】
請求項6に記載の変位測定方法であって、
前記工程(d)において、前記第2距離の変化を時間経過と共に色の変化として表示する、変位測定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、変位測定方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、液体吐出ヘッドに備えられたノズルの異常を判定する技術が開示されている。この技術では、ノズルの開口部に計測光としてのレーザー光を照射して、インク液のメニスカス振動を測定し、その測定結果に基づき、異常の有無を判定している。
【先行技術文献】
【特許文献】
【0003】
特開2023-176559号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
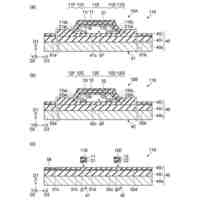
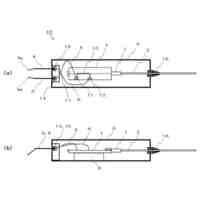
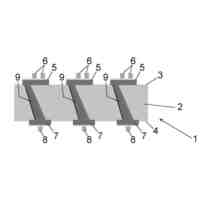
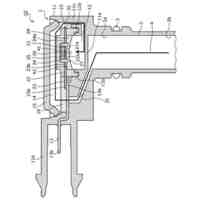
液体吐出ヘッドには、インク液を振動させるために、圧電素子などの微小な変位デバイスが備えられている。こうした変位デバイスが、シリコン製の封止部材等によって蓋をされている場合、その変位を、レーザー光を用いて直接的に測定することは困難である。
【課題を解決するための手段】
【0005】
本開示の第1の形態によれば、赤外線カメラを利用して測定対象物の変位を測定する変位測定方法が提供される。この変位測定方法は、(a)前記測定対象物に対して前記赤外線カメラを第1周波数で第1距離、往復移動させつつ前記赤外線カメラによって前記測定対象物を撮影し、前記測定対象物が発する赤外線から第1信号強度を求める工程と、(b)前記測定対象物が第2周波数で繰り返し変位するように前記測定対象物を駆動させつつ前記赤外線カメラによって前記測定対象物を撮影し、前記測定対象物が発する赤外線から第2信号強度を求める工程と、(c)第1距離と、前記第1信号強度と、前記第2信号強度とを用いて、前記測定対象物の変位量である第2距離を求める工程と、を含む。
【図面の簡単な説明】
【0006】
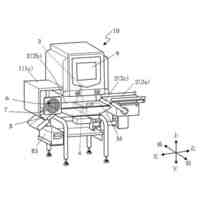
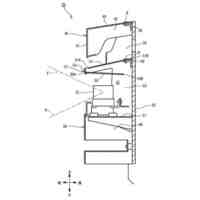
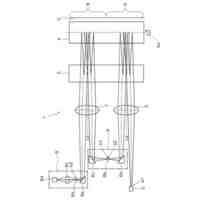
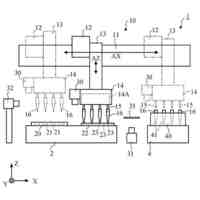
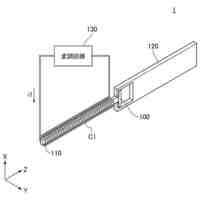
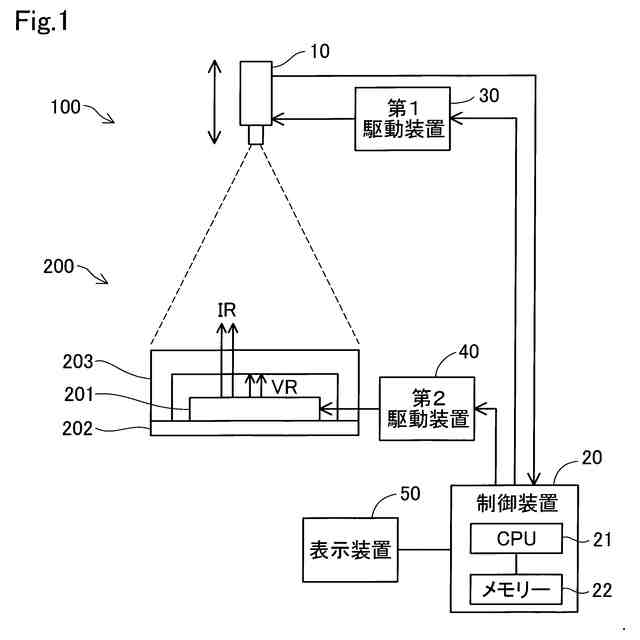
第1実施形態における変位測定システムの概略構成を示す説明図。
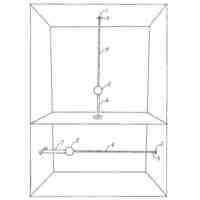
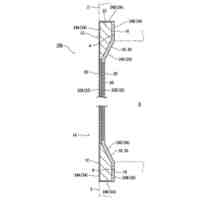
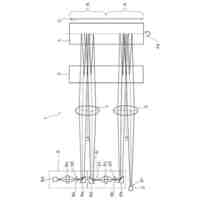
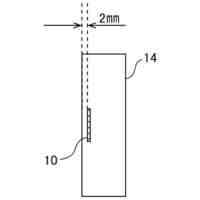
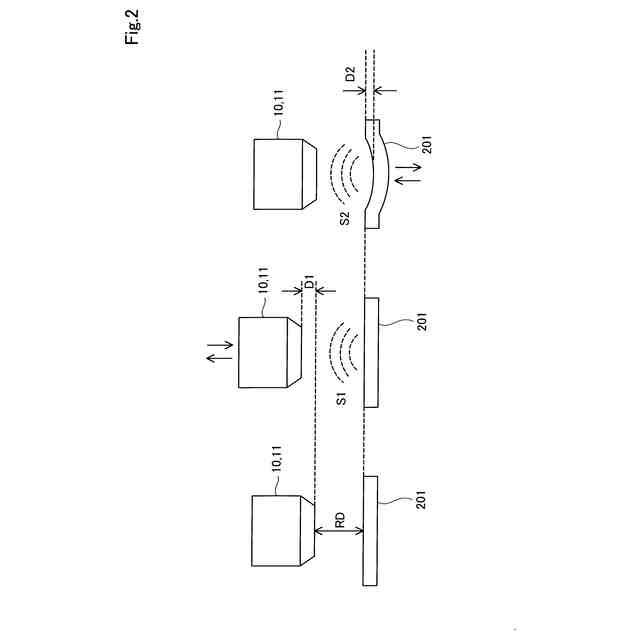
変位デバイスと赤外線カメラとの距離が変わる2つの状況を示す説明図。
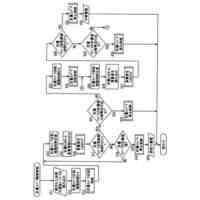
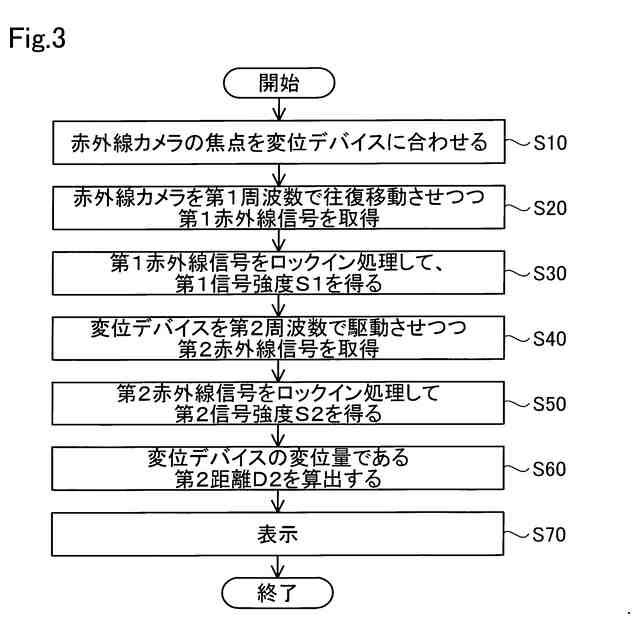
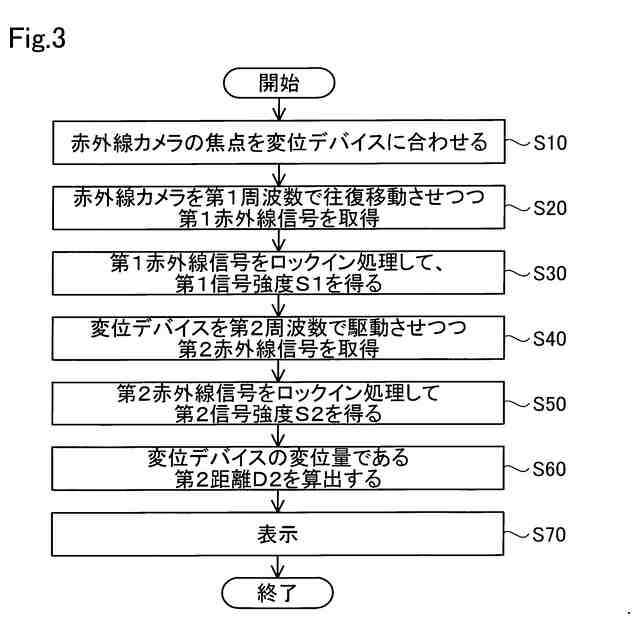
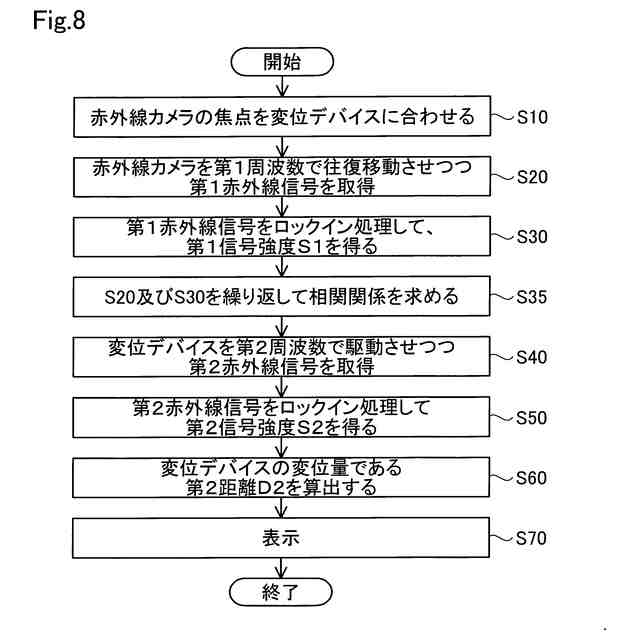
制御装置が実行する変位測定処理のフローチャート。
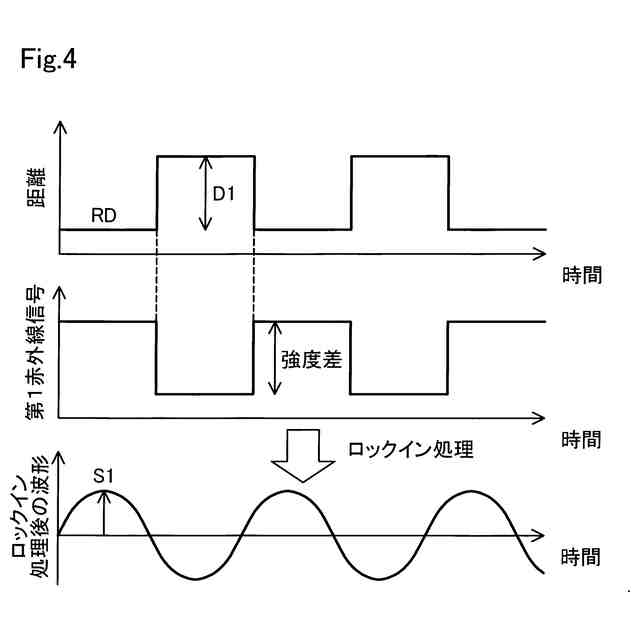
第1赤外線信号に対するロックイン処理の説明図。
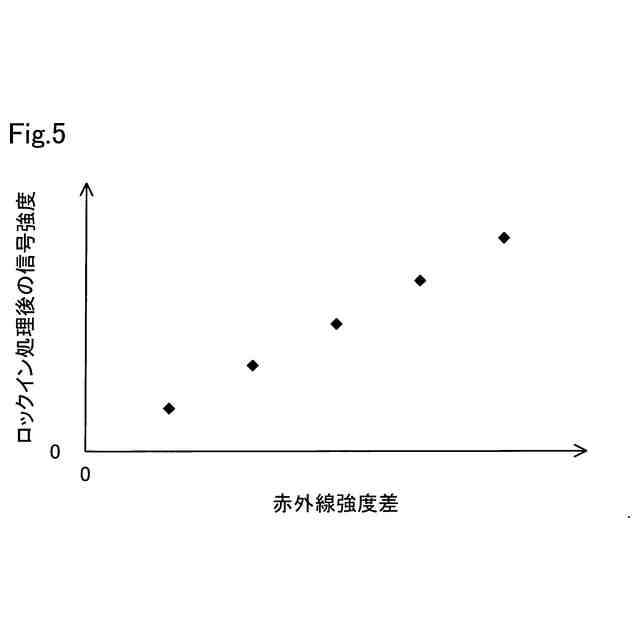
赤外線強度差とロックイン処理後の信号強度の関係を示す図。
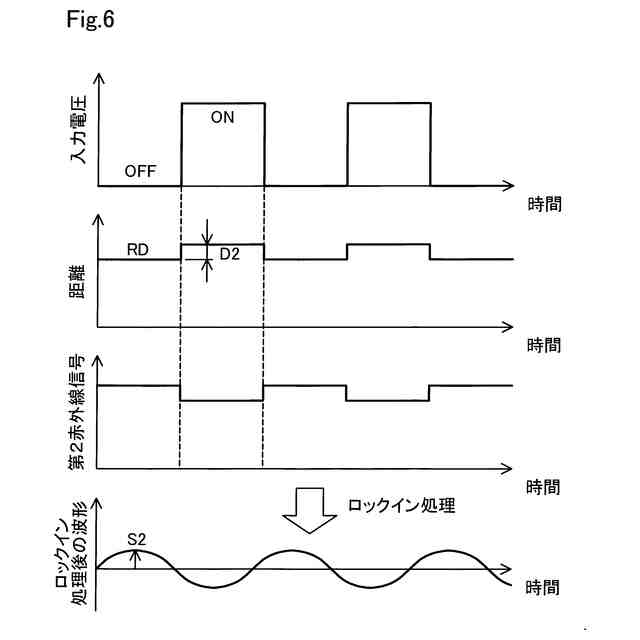
第2赤外線信号に対するロックイン処理の説明図。
第2距離と第2信号強度の表示例を示す図。
第2実施形態における変位測定処理のフローチャート。
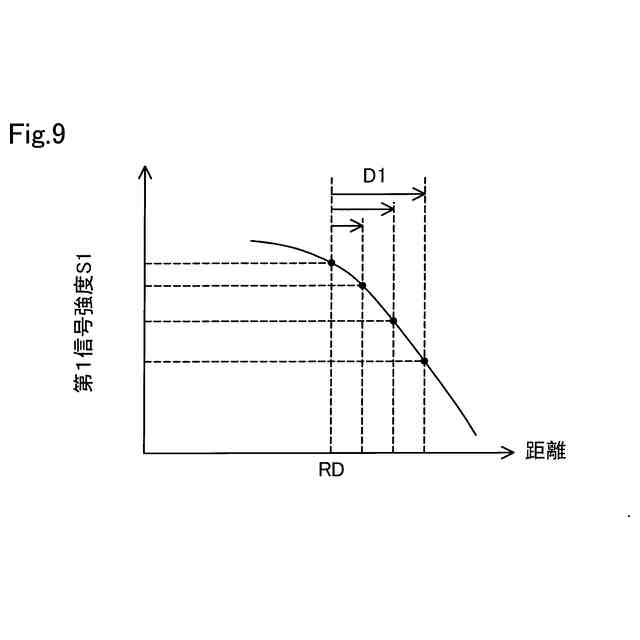
第2実施形態における第1距離と第1信号強度との相関関係を示す図。
変位デバイスを変位させる基準距離の他の設定例を示す図である。
【発明を実施するための形態】
【0007】
A.第1実施形態:
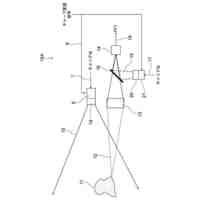
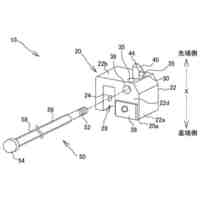
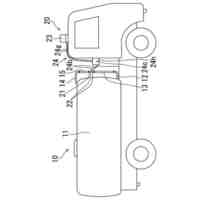
図1は、第1実施形態における変位測定システム100の概略構成を示す説明図である。変位測定システム100は、測定対象物200の変位を測定するためのシステムである。変位測定システム100は、赤外線カメラ10と、制御装置20と、第1駆動装置30と、第2駆動装置40とを備える。
【0008】
赤外線カメラ10は、測定対象物200から発せられる赤外線IRを撮影する装置である。赤外線カメラ10は、赤外線IRを撮影することによって得られた赤外線信号を、制御装置20に出力する。本実施形態の赤外線カメラ10は、第1駆動装置30によって、測定対象物200から遠ざかる方向と近づく方向とに往復移動可能に構成されている。第1駆動装置30は、赤外線カメラ10を移動させるためのアクチュエーターとアクチュエーターを制御する制御回路とを含む。第1駆動装置30は、制御装置20に接続されている。なお、以下では、測定対象物200から遠ざかる方向が上方向であり、測定対象物200に近づく方向が下方向であるものとする。
【0009】
制御装置20は、CPU21とメモリー22とを含むコンピューターとして構成されている。CPU21が、メモリー22に記憶されたプログラムを実行することで、制御装置20は、後述する変位測定処理を実行する。制御装置20には、表示装置50が接続されている。表示装置50には、変位測定処理によって測定された測定結果が表示される。
【0010】
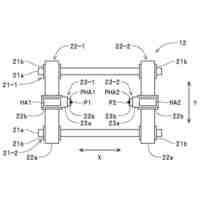
第2駆動装置40は、測定対象物200に備えられた変位デバイス201を駆動するための回路を含む。第2駆動装置40は、制御装置20に接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
計量スプーン
1日前
個人
微小振動検出装置
12日前
ユニパルス株式会社
力変換器
1か月前
株式会社イシダ
X線検査装置
12日前
株式会社豊田自動織機
産業車両
1か月前
横浜ゴム株式会社
音響窓
1か月前
三菱電機株式会社
計測器
27日前
日置電機株式会社
測定装置
1か月前
個人
センサーを備えた装置
1か月前
株式会社辰巳菱機
システム
21日前
IPU株式会社
距離検出装置
1か月前
日本精機株式会社
施工管理システム
1か月前
アンリツ株式会社
分光器
7日前
株式会社東芝
センサ
1か月前
ダイハツ工業株式会社
測定用具
5日前
アンリツ株式会社
分光器
7日前
株式会社東芝
センサ
12日前
株式会社FRPカジ
FRP装置
23日前
大和製衡株式会社
組合せ計量装置
23日前
株式会社CAST
センサ固定治具
1か月前
学校法人立命館
液面レベルセンサ
20日前
日本精工株式会社
分注装置
19日前
株式会社精工技研
光電圧プローブ
13日前
富士レビオ株式会社
嵌合システム
26日前
株式会社ヨコオ
コンタクタ
5日前
TDK株式会社
磁気センサ
1日前
TDK株式会社
ガスセンサ
15日前
TDK株式会社
磁気センサ
8日前
株式会社カワタ
サンプリング装置
16日前
株式会社田中設備
報知装置
1か月前
株式会社熊平製作所
刃物類判別装置
1か月前
富士電機株式会社
半導体パッケージ
29日前
日本碍子株式会社
ガスセンサ
2日前
三菱マテリアル株式会社
温度センサ
19日前
大同特殊鋼株式会社
超音波探傷方法
1日前
富士電機株式会社
半導体パッケージ
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ