TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025128340
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2025099906,2024034581
出願日
2025-06-16,2018-02-26
発明の名称
サーバ装置、端末装置、通信システム、情報受信方法、情報送信方法、情報受信用プログラム、情報送信用プログラム、及び記録媒体
出願人
パイオニア株式会社
代理人
弁理士法人インテクト国際特許事務所
,
個人
主分類
G08G
1/00 20060101AFI20250826BHJP(信号)
要約
【課題】通信負荷を抑制しながら、地図情報の更新のために、移動体の周辺の情報を効率的にサーバ装置が取得する。
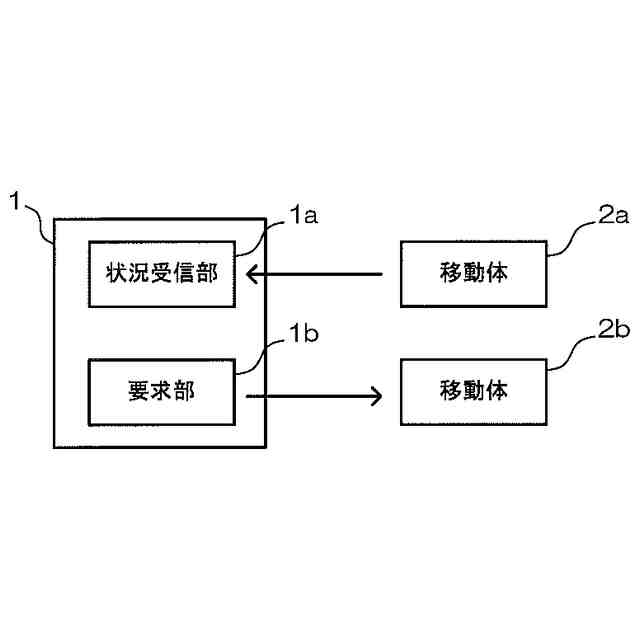
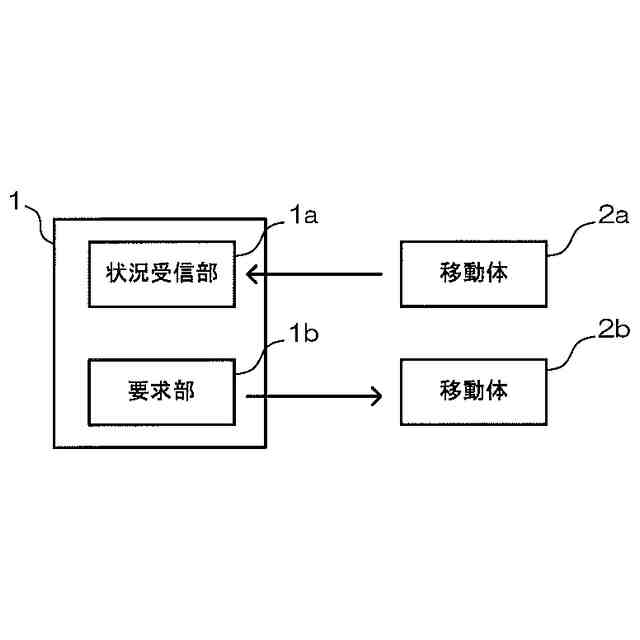
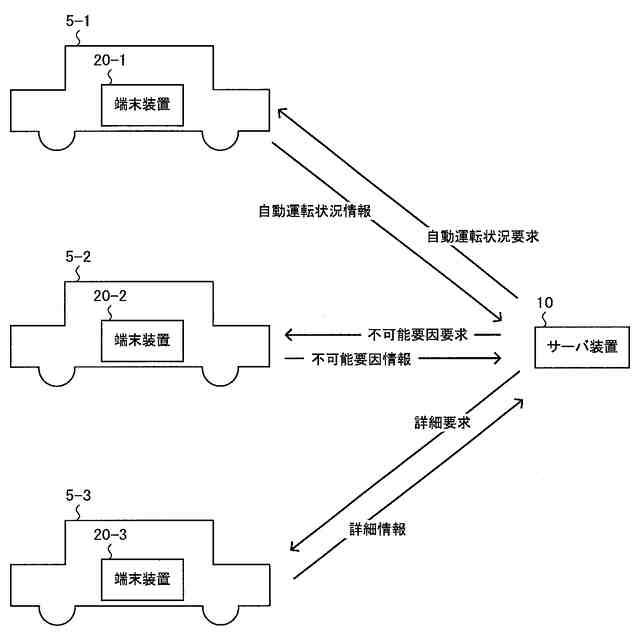
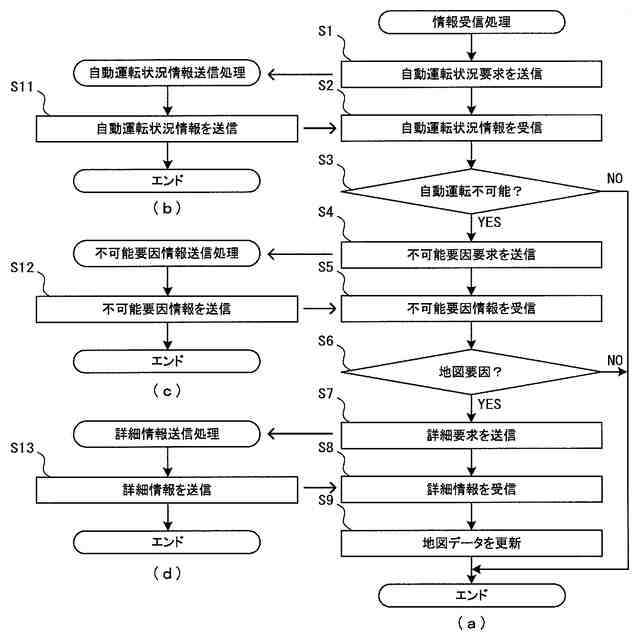
【解決手段】第1移動体の周辺の状態と地図とに基づく自動運転が可能な第1移動体から自動運転の状況を示す状況情報を受信し、第1移動体が移動した場所の状態を示す状態情報の送信が可能な第2移動体へ、状態情報の要求を送信し、受信された状況情報が、自動運転が可能であったことを示す場合、要求の送信を抑止する。
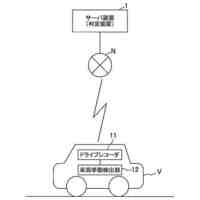
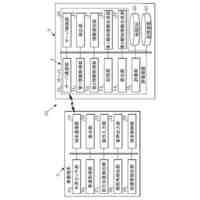
【選択図】図1
特許請求の範囲
【請求項1】
第1移動体の周辺の状態と地図とに基づく自動運転が可能な前記第1移動体から該自動運転の状況を示す状況情報を受信する状況受信部と、
前記第1移動体が移動した場所の状態を示す状態情報の送信が可能な第2移動体へ、該状態情報の要求を送信する要求部と、
を備え、
前記要求部は、前記受信された状況情報が、前記自動運転が可能であったことを示す場合、前記要求の送信を抑止することを特徴とするサーバ装置。
続きを表示(約 2,000 文字)
【請求項2】
前記受信された状況情報が、前記自動運転が不可能であったことを示す場合、前記自動運転が不可能な要因を示す要因情報の要求を、第3移動体の周辺の状態と地図とに基づく自動運転が可能な第3移動体へ送信する要因要求部と、
前記第3移動体から前記要因情報を受信する要因受信部と、
を更に備え、
前記要求部は、前記受信された要因情報が、前記第1移動体が移動した場所の状態と前記地図との間の差違であることを示す場合、前記状態情報の要求を送信することを特徴とする請求項1に記載のサーバ装置。
【請求項3】
前記状況受信部は、前記状況情報と、前記自動運転が不可能であった場合における該自動運転が不可能な要因を示す要因情報とを受信し、
前記要求部は、前記要因情報が、前記第1移動体が移動した場所の状態と前記地図との間の差違が要因であることを示す場合、前記状態情報の要求を送信することを特徴とする請求項1に記載のサーバ装置。
【請求項4】
前記要因情報は、前記第1移動体が移動した場所のうち、前記第1移動体が移動した場所の状態と前記地図との間で所定基準以上の差違がある地点を示す地点情報を含み、
前記要求部は、前記地点情報が示す地点の状態を示す地点状態情報の要求を送信することを特徴とする請求項2又は3に記載のサーバ装置。
【請求項5】
請求項2に記載のサーバ装置と通信可能であり、移動体の周辺の状態と地図とに基づく自動運転が可能な複数の移動体に含まれる一の移動体に搭載される端末装置において、
前記複数の移動体のうち自動運転が不可能であったことを示す前記状況情報を前記サーバ装置へ送信した移動体の自動運転が不可能であった要因を示す前記要因情報の要求を前記サーバ装置から受信する要因要求受信部と、
前記要因情報の要求が受信された場合、前記自動運転が不可能であったことを示す前記状況情報を前記サーバ装置へ送信した前記移動体が移動した場所における前記一の移動体の自動運転が可能であるか否かの判定結果に基づいて、前記要因情報を前記サーバ装置へ送信する要因送信部と、
を備えることを特徴とする端末装置。
【請求項6】
前記一の移動体の自動運転の状況を示す状況情報を取得する取得部と、
前記取得された状況情報を前記サーバ装置へ送信する状況送信部と、
を更に備えることを特徴とする請求項5に記載の端末装置。
【請求項7】
前記要因送信部は、前記第1移動体が移動した場所に存在する地物の属性と前記地図が示す前記地物の属性とに差違がある場合、前記地物の属性に差違があることを示す差違情報が付加された前記要因情報を送信することを特徴とする請求項5又は6に記載の端末装置。
【請求項8】
前記差違情報は、差違がある前記属性に関する情報を含むことを特徴とする請求項7に記載の端末装置。
【請求項9】
前記複数の移動体のうち自動運転が不可能な状況であることを示す状況情報を前記サーバ装置へ送信した移動体が移動した場所の状態を示す状態情報の要求を前記サーバ装置から受信する周辺要求受信部と、
前記状態情報の要求が受信された場合、前記自動運転が不可能な状況であることを示す前記状況情報を送信した前記移動体が移動した場所における前記一の移動体の周辺の状態を示す前記状態情報を前記サーバ装置へ送信する周辺送信部と、
を更に備えることを特徴とする請求項5乃至8の何れか1項に記載の端末装置。
【請求項10】
第1移動体の周辺の状態と地図とに基づく自動運転が可能な前記第1移動体から該自動運転の状況を示す状況情報を受信する状況受信部と、
前記第1移動体が移動した場所の状態を示す状態情報の送信が可能な第2移動体へ、該状態情報の要求を送信する要求部と、
前記第2移動体から前記状態情報を受信する状態受信部と、
を備えるサーバ装置と、
前記第1移動体の自動運転の状況を示す前記状況情報を取得する取得部と、
前記取得された状況情報を前記サーバ装置へ送信する状況送信部と、
を備える第1端末装置と、
前記サーバ装置から前記要求を受信する受信部と、
前記要求が受信された場合、前記第1移動体が移動した場所における前記第2移動体の周辺の状態を示す前記状態情報を前記サーバ装置へ送信する周辺送信部と、
を備える第2端末装置と、
を含み、
前記要求部は、前記受信された状況情報が、前記自動運転が可能であったことを示す場合、前記要求の送信を抑止することを特徴とする通信システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願は、移動体の自動運転に用いられる地図情報のメンテナンスのために、移動体の周辺の情報を移動体からサーバ装置へ送信する通信システムの技術分野に属する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
近年、例えばNDT(Normal Distribution Transform)、OGM(Occupancy Grid Map)等を用いた3次元の詳細な地図情報に基づいて、自動運転を行う車両の研究開発が盛んである。例えば、LIDAR(Laser Imaging Detection and Ranging)等の、車両の周辺に存在する物体の移動体からの相対的な位置及び形状を高精度に検出するセンサを搭載した専用車両が走行中にこのセンサにより検出された情報に基づいて、地図情報が生成される。自動運転を行う車両は、この車両に搭載されたセンサにより検出された情報と地図情報とを比較して、車両の現在位置の推定を行ったり、アクセル、ブレーキ、ステアリング等を制御したりする。
【0003】
特許文献1には、車両に搭載される車載装置が、自動運転等による車両の挙動が検出されたときに、挙動が検出された旨を表す挙動検出通知信号を含む送信信号をサーバ装置へ送信し、サーバ装置が、送信信号の受信に応じて、所定条件が成立すると判定した場合、車両の状況を表す車両情報のアップロード要求を車載装置に送信することが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-4445号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
実際の地上の状態は頻繁に変化し得るため、この変化に応じて地図情報を更新することが望まれる。そこで、一般の車両が、走行中にその車両に搭載されたセンサにより検出された情報をサーバ装置に送信し、サーバ装置は、受信した情報に基づいて、地図情報を更新することが考えられる。しかしながら、センサにより検出された情報を常時サーバ装置へ送信していたのでは、通信負荷が膨大になるという問題がある。
【0006】
特許文献1には、車両の状況を表す情報の送信による通信負荷の抑制を目的とする技術は開示されているものの、車両の周辺の情報の送信による通信負荷の抑制については何ら言及されていない。
【課題を解決するための手段】
【0007】
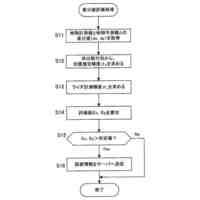
請求項1に記載の発明は、第1移動体の周辺の状態と地図とに基づく自動運転が可能な前記第1移動体から該自動運転の状況を示す状況情報を受信する状況受信部と、前記第1移動体が移動した場所の状態を示す状態情報の送信が可能な第2移動体へ、該状態情報の要求を送信する要求部と、を備え、前記要求部は、前記受信された状況情報が、前記自動運転が可能であったことを示す場合、前記要求の送信を抑止することを特徴とするサーバ装置である。
【0008】
請求項5に記載の発明は、前記サーバ装置と通信可能であり、移動体の周辺の状態と地図とに基づく自動運転が可能な複数の移動体に含まれる一の移動体に搭載される端末装置において、前記複数の移動体のうち自動運転が不可能であったことを示す前記状況情報を前記サーバ装置へ送信した移動体の自動運転が不可能であった要因を示す前記要因情報の要求を前記サーバ装置から受信する要因要求受信部と、前記要因情報の要求が受信された場合、前記自動運転が不可能であったことを示す前記状況情報を前記サーバ装置へ送信した前記移動体が移動した場所における前記一の移動体の自動運転が可能であるか否かの判定結果に基づいて、前記要因情報を前記サーバ装置へ送信する要因送信部と、を備えることを特徴とする。
【0009】
請求項10に記載の発明は、第1移動体の周辺の状態と地図とに基づく自動運転が可能な前記第1移動体から該自動運転の状況を示す状況情報を受信する状況受信部と、前記第1移動体が移動した場所の状態を示す状態情報の送信が可能な第2移動体へ、該状態情報の要求を送信する要求部と、前記第2移動体から前記状態情報を受信する状態受信部と、を備えるサーバ装置と、前記第1移動体の自動運転の状況を示す前記状況情報を取得する取得部と、前記取得された状況情報を前記サーバ装置へ送信する状況送信部と、を備える第1端末装置と、前記サーバ装置から前記要求を受信する受信部と、前記要求が受信された場合、前記第1移動体が移動した場所における前記第2移動体の周辺の状態を示す前記状態情報を前記サーバ装置へ送信する周辺送信部と、を備える第2端末装置と、を含み、前記要求部は、前記受信された状況情報が、前記自動運転が可能であったことを示す場合、前記要求の送信を抑止することを特徴とする。
【0010】
請求項11に記載の発明は、コンピュータにより実行される情報受信方法において、第1移動体の周辺の状態と地図とに基づく自動運転が可能な前記第1移動体から該自動運転の状況を示す状況情報を受信する状況受信工程と、前記第1移動体が移動した場所の状態を示す状態情報の送信が可能な第2移動体へ、該状態情報の要求を送信する要求工程と、を含み、前記要求工程は、前記受信された状況情報が、前記自動運転が可能であったことを示す場合、前記要求の送信を抑止することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
パイオニア株式会社
判定装置
17日前
パイオニア株式会社
探索装置
1か月前
パイオニア株式会社
取付機構
6日前
パイオニア株式会社
制御装置
24日前
パイオニア株式会社
サーバ装置
4日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
17日前
パイオニア株式会社
状況出力装置
11日前
パイオニア株式会社
情報処理装置
17日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
17日前
パイオニア株式会社
情報表示装置
17日前
パイオニア株式会社
情報処理装置
24日前
パイオニア株式会社
情報提供システム、情報提供方法、プログラムおよび記録媒体
17日前
パイオニア株式会社
距離算出装置
13日前
パイオニア株式会社
情報処理装置
4日前
パイオニア株式会社
情報処理装置
26日前
パイオニア株式会社
データ処理装置
17日前
パイオニア株式会社
ミラースキャナ
17日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
14日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
14日前
パイオニア株式会社
情報処理装置、情報処理方法、情報処理プログラム及び記憶媒体
14日前
パイオニア株式会社
アクチュエータ
24日前
パイオニア株式会社
リスク情報出力装置
11日前
パイオニア株式会社
振動発生装置、振動発生方法
6日前
パイオニア株式会社
情報処理装置及び情報処理方法
11日前
パイオニア株式会社
情報処理装置及び情報処理方法
4日前
パイオニア株式会社
センサ装置、筐体及びカバー部
4日前
パイオニア株式会社
調整方法、検出機器及び検出装置
24日前
パイオニア株式会社
走査方法の決定方法、および計測方法
17日前
パイオニア株式会社
評価装置、評価方法及び評価プログラム
4日前
パイオニア株式会社
表示装置、制御方法、プログラム及び記憶媒体
13日前
パイオニア株式会社
出力装置、制御方法、プログラム及び記憶媒体
13日前
パイオニア株式会社
情報処理装置、方法、プログラム及び記憶媒体
24日前
パイオニア株式会社
経路案内装置、制御方法、プログラム及び記憶媒体
1か月前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
24日前
パイオニア株式会社
情報処理装置、制御方法、プログラム及び記憶媒体
17日前
パイオニア株式会社
情報処理装置、判定方法、プログラム及び記憶媒体
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ