TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025127340
公報種別
公開特許公報(A)
公開日
2025-09-01
出願番号
2024024033
出願日
2024-02-20
発明の名称
ハンド装置および物品移送装置
出願人
オークラ輸送機株式会社
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20250825BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数段に積み重なった物品を把持できるハンド装置を提供する。
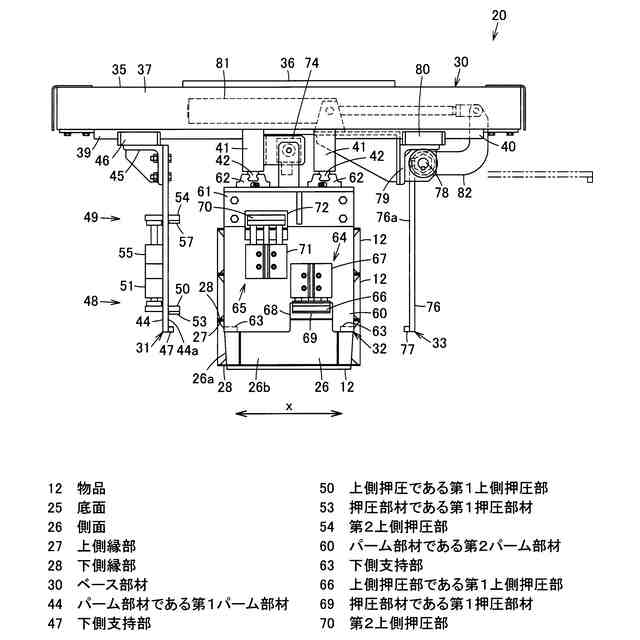
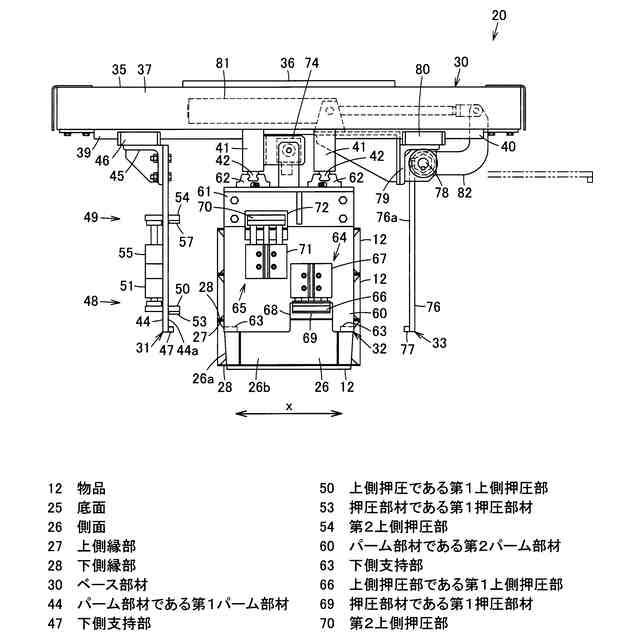
【解決手段】複数段に積み重なった状態で下段の上側縁部27と上段の下側縁部28が積み重ね方向に重なる物品12を把持するハンド装置20である。ハンド装置20は、下側支持部63と、上側押圧部66とを備える。下側支持部63は、1段目の物品12の下側縁部28を支持する。上側押圧部66は、1段目の物品12に積み重ねられた2段目の物品12の下側縁部28を積み重ね方向上側から押圧し、2段目の物品12の下側縁部28と1段目の物品12の上側縁部27とを下側支持部63とで積み重ね方向両側から把持する。
【選択図】図3
特許請求の範囲
【請求項1】
底面と、前記底面から立設する側面と、前記側面の上部側から外側に突出する上側縁部と、前記側面の下部側から外側に突出する下側縁部とを有し、複数段に積み重なった状態で下段の前記上側縁部と上段の前記下側縁部が積み重ね方向に重なる物品を把持するハンド装置であって、
1段目の前記物品の前記下側縁部を支持する下側支持部と、
前記1段目の前記物品に積み重ねられた2段目の前記物品の前記下側縁部を前記積み重ね方向上側から押圧し、前記2段目の前記物品の前記下側縁部と前記1段目の前記物品の前記上側縁部とを前記下側支持部とで前記積み重ね方向両側から把持する上側押圧部と
を備えることを特徴とするハンド装置。
続きを表示(約 1,900 文字)
【請求項2】
底面と、前記底面から立設する側面と、前記側面の上部側から外側に突出する上側縁部と、前記側面の下部側から外側に突出し外縁が前記上側縁部よりも内側に位置する下側縁部とを有し、複数段に積み重なった状態で下段の前記上側縁部と上段の前記下側縁部が積み重ね方向に重なる物品を把持するハンド装置であって、
1段目の前記物品の前記下側縁部を支持する下側支持部と、
前記1段目の前記物品上に積み重ねられた2段目の前記物品の前記下側縁部を前記積み重ね方向上側から押圧し、前記2段目の前記物品の前記下側縁部と前記2段目の前記物品の前記下側縁部から外側に突出した前記1段目の前記物品の前記上側縁部の外縁部とを前記下側支持部とで前記積み重ね方向両側から把持する押圧部材を有する上側押圧部とを備え、
前記押圧部材は、前記2段目の前記物品の前記下側縁部と前記1段目の前記物品の前記上側縁部とに接触する
ことを特徴とするハンド装置。
【請求項3】
ベース部材と、
前記ベース部材に取り付けられ、前記物品の前記側面と対向し、前記積み重ね方向に延在するパーム部材とをさらに備え、
前記パーム部材は、前記下側支持部を有するとともに、前記下側支持部よりも前記積み重ね方向上側の位置に前記上側押圧部を有する
ことを特徴とする請求項1に記載のハンド装置。
【請求項4】
底面と、前記底面から立設する側面と、前記側面の上部側から外側に突出する上側縁部と、前記側面の下部側から外側に突出する下側縁部とを有し、複数段に積み重なった状態で下段の前記上側縁部と上段の前記下側縁部が積み重ね方向に重なる物品を把持するハンド装置であって、
1段目の前記物品の前記下側縁部を支持する下側支持部と、
前記1段目の前記物品に積み重ねられた2段目の前記物品の前記下側縁部を前記積み重ね方向上側から押圧し、前記2段目の前記物品の前記下側縁部と前記1段目の前記物品の前記上側縁部とを前記下側支持部とで前記積み重ね方向両側から把持する第1上側押圧部と、
前記2段目の前記物品に積み重ねられた3段目の前記物品が存在する場合、前記3段目の前記物品を前記積み重ね方向上側から押圧する第2上側押圧部と
を備えることを特徴とするハンド装置。
【請求項5】
前記第2上側押圧部は、前記3段目の前記物品に積み重ねられた4段目の前記物品が存在する場合、前記3段目の前記物品の前記上側縁部に重なった、前記4段目の前記物品の前記下側縁部を前記積み重ね方向上側から押圧する
ことを特徴とする請求項4に記載のハンド装置。
【請求項6】
ベース部材と、
前記ベース部材に取り付けられ、前記物品の側面と対向し、前記積み重ね方向に延在するパーム部材とをさらに備え、
前記パーム部材は、前記下側支持部を下端部側に有し、前記第1上側押圧部を前記下側支持部よりも前記積み重ね方向上側の位置に有し、前記第2上側押圧部を前記第1上側押圧部よりも前記積み重ね方向上側の位置に有する
ことを特徴とする請求項4に記載のハンド装置。
【請求項7】
前記パーム部材は、前記物品の第1側面と対向する第1のパーム部材と、前記第1側面と直交する第2側面と対向する第2のパーム部材とを有し、
前記第1のパーム部材と前記第2のパーム部材の夫々の前記第2上側押圧部は、前記第1のパーム部材と前記第2のパーム部材の夫々の前記第1上側押圧部よりも接近するように前記第1のパーム部材と前記第2のパーム部材に設置される
ことを特徴とする請求項6に記載のハンド装置。
【請求項8】
底面と、前記底面から立設する側面と、前記側面の上部側から外側に突出する上側縁部と、前記側面の下部側から外側に突出する下側縁部とを有し、複数段に積み重なった状態で下段の前記上側縁部と上段の前記下側縁部が積み重ね方向に重なる物品を把持するハンド装置であって、
最下段の前記物品の前記下側縁部を支持する下側支持部と、
上下に重なる前記物品のうち、上段の前記物品の前記下側縁部を前記下側支持部に向けて押圧することで、上段の前記物品の前記下側縁部と下段の前記物品の前記上側縁部とを前記下側支持部に向けて押圧する上側押圧部と
を備えることを特徴とするハンド装置。
【請求項9】
請求項1ないし8いずれか一に記載のハンド装置と、
前記ハンド装置を移動させる移動装置と
を備えることを特徴とする物品移送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品を把持するハンド装置、およびこのハンド装置を備えた物品移送装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、例えば下記の特許文献1に記載されたハンド装置が知られている。このハンド装置はX-Y方向移動装置に設置され、容器のフランジ部(縁部)を上下から挟むことで容器を把持可能としている。そして、X-Y方向移動装置によってハンド装置を移動させることで容器を1個ずつ把持して目的の場所に順次移送することで移送作業を行っている。
【先行技術文献】
【特許文献】
【0003】
実開平6-71088号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このようなハンド装置は、物品を1個ずつ保持することができるが、移送作業の更なる効率化のために複数個の物品を一度に把持可能なハンド装置が必要とされることがある。
【0005】
本発明が解決しようとする課題は、複数段に積み重なった物品を把持できるハンド装置および物品移送装置を提供することにある。
【課題を解決するための手段】
【0006】
本発明のハンド装置は、底面と、前記底面から立設する側面と、前記側面の上部側から外側に突出する上側縁部と、前記側面の下部側から外側に突出する下側縁部とを有し、複数段に積み重なった状態で下段の前記上側縁部と上段の前記下側縁部が積み重ね方向に重なる物品を把持するハンド装置であって、1段目の前記物品の前記下側縁部を支持する下側支持部と、前記1段目の前記物品に積み重ねられた2段目の前記物品の前記下側縁部を前記積み重ね方向上側から押圧し、前記2段目の前記物品の前記下側縁部と前記1段目の前記物品の前記上側縁部とを前記下側支持部とで前記積み重ね方向両側から把持する上側押圧部とを備える。
【発明の効果】
【0007】
本発明によれば、複数段に積み重なった物品を把持できるハンド装置および物品移送装置を提供できる。
【図面の簡単な説明】
【0008】
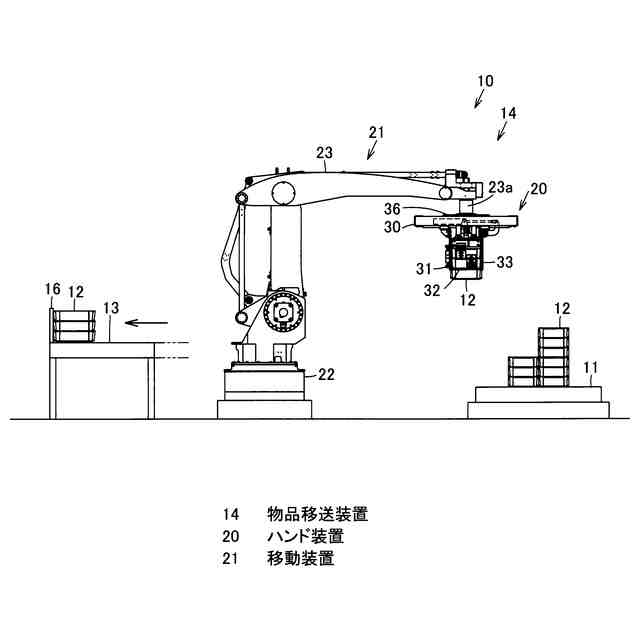
本発明の第1の実施の形態を示すハンド装置を備えた物品移送装置を含む物品移送ステムの正面図である。
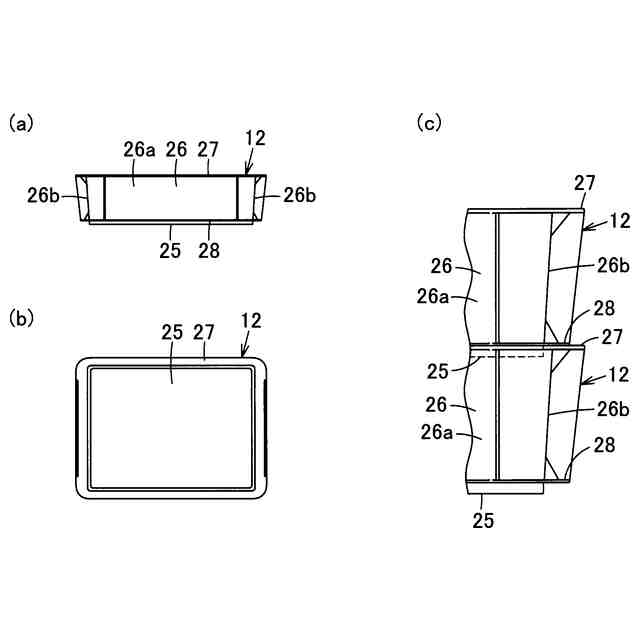
同上ハンド装置が取り扱う物品を示し、(a)は物品の側面図、(b)は物品の平面図、(c)は物品を積み重ねた状態の一部の拡大側面図である。
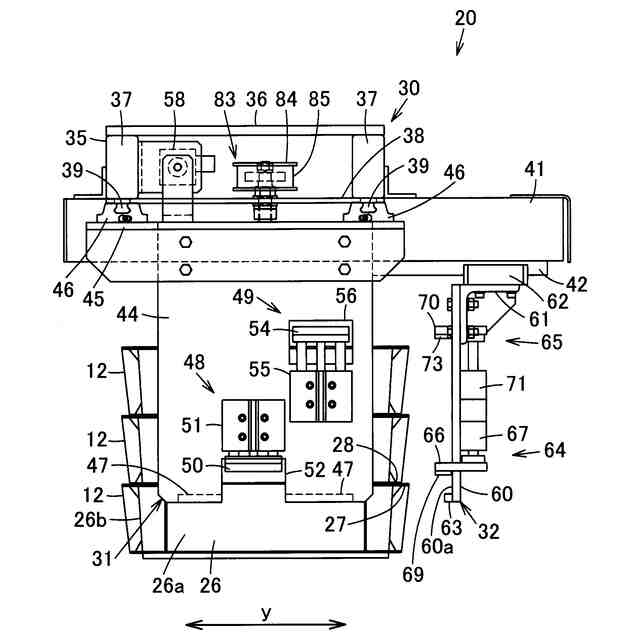
同上ハンド装置の正面図である。
同上ハンド装置の側面図である。
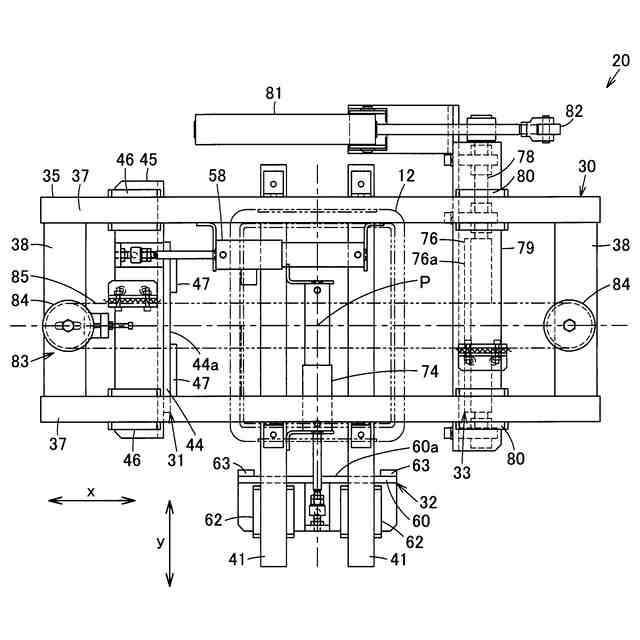
同上ハンド装置の平面図である。
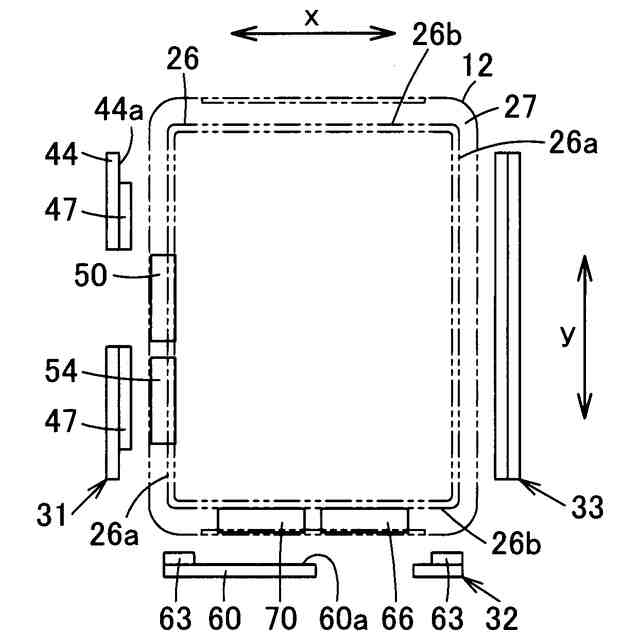
同上ハンド装置と物品との位置関係を示す平面図である。
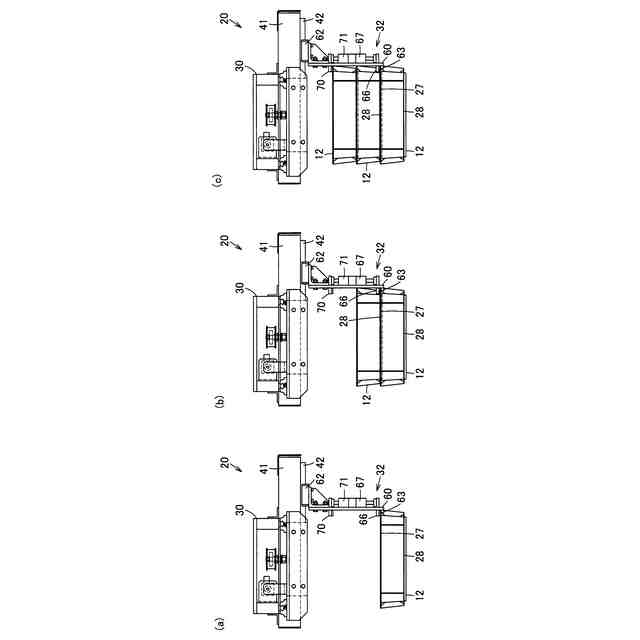
同上ハンド装置による物品の段数に応じた把持状態を示し、(a)は1段の物品を把持する場合の側面図、(b)は2段の物品を把持する場合の側面図、(c)は3段の物品を把持する場合の側面図である。
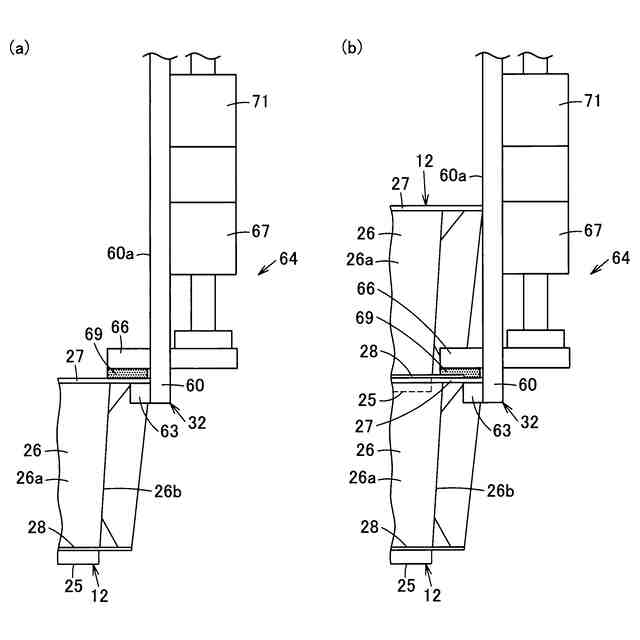
同上ハンド装置による物品の段数に応じた把持状態を示し、(a)は1段の物品を把持する場合の拡大側面図、(b)は2段の物品を把持する場合の拡大側面図である。
同上ハンド装置の動作を(a)~(d)に示す説明図である。
図9に続くハンド装置の動作を(a)~(d)に示す説明図である。
図10に続く同上ハンド装置の動作を(a)、(b)に示す説明図である。
本発明の第2の実施の形態を示し、4段の物品を把持するハンド装置の側面図である。
【発明を実施するための形態】
【0009】
以下、本発明の第1の実施の形態を、図1ないし図11を参照して説明する。
【0010】
図1に示す物品移送システム10は、物品移送装置14により、移送元から物品12を取り出して、移送先に複数の物品12を積み付けるパレタイジングシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
16日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
2か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
株式会社不二越
ロボットシステム
10日前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボット操作装置
4日前
日本精工株式会社
締結用工具
13日前
川崎重工業株式会社
ロボット
2か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
11日前
トヨタ自動車株式会社
カプラ接続治具
20日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
積水ハウス株式会社
フィルム除去具
1か月前
ホシデン株式会社
分解用治具
2か月前
オークラ輸送機株式会社
ハンド装置
2か月前
トヨタ自動車株式会社
歩行ロボット
2日前
アピュアン株式会社
衝撃工具
2か月前
株式会社マキタ
電気機器
2か月前
ダイハツ工業株式会社
移載治具
11日前
川崎重工業株式会社
ロボットシステム
2か月前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社リコー
多関節ロボット
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
ロボットシステム
26日前
SMC株式会社
ベルヌーイグリッパ
2か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































