TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126572
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022870
出願日
2024-02-19
発明の名称
電動式手持ち形作業機の操作レバー機構
出願人
株式会社やまびこ
代理人
弁理士法人エビス国際特許事務所
主分類
B25F
5/00 20060101AFI20250822BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
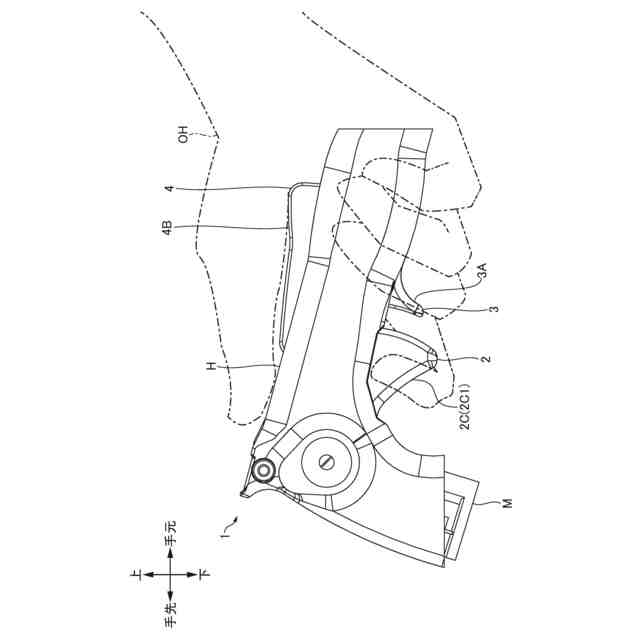
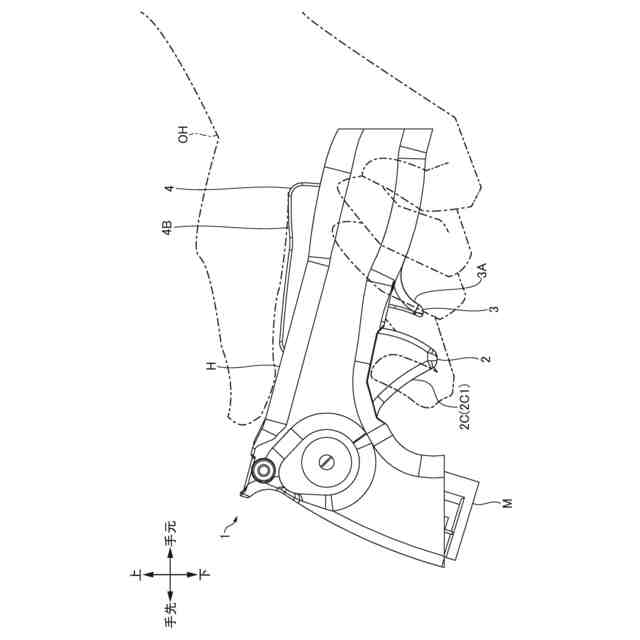
【課題】電動式手持ち形作業機の操作レバー機構において、ロック解除操作の安全規格に対応しながら、エンジン式と同程度の操作性が確保できるようにする。
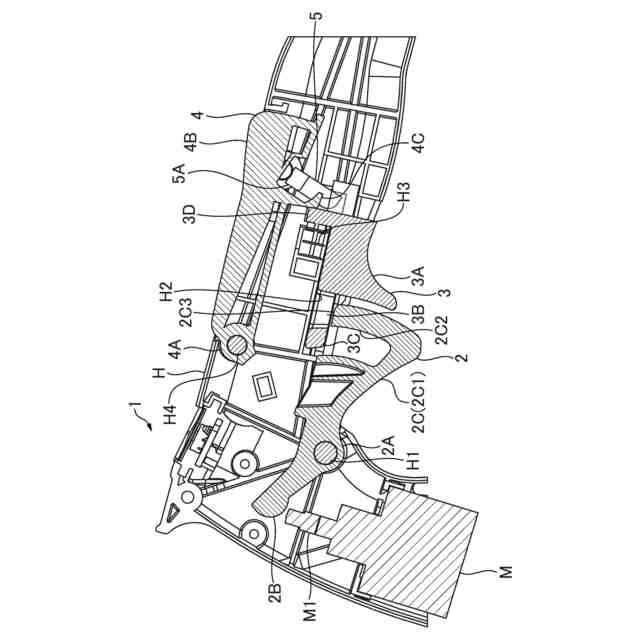
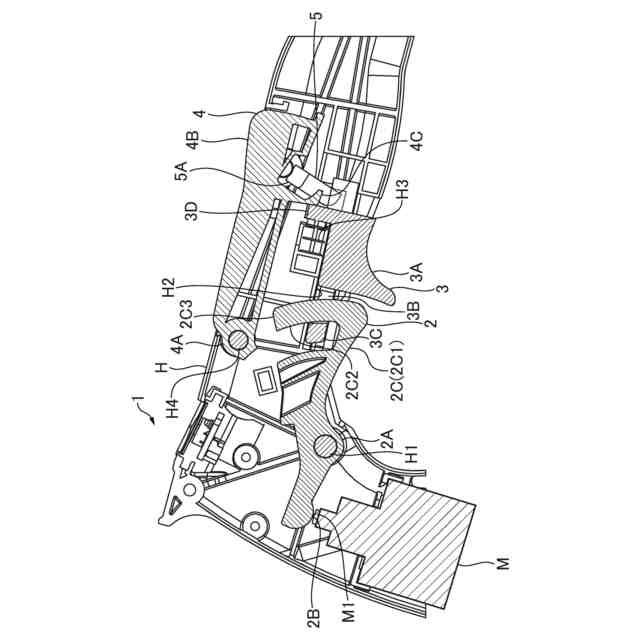
【解決手段】操作レバー機構は、電動作業部を起動するためのトリガーレバーと、ハンドルの延設方向にスライド自在に設けられ、非操作時にトリガーレバーの動きをロックし、スライド操作によってトリガーレバーのロックを解除するスライド部材と、ハンドルを片手で握ることで操作され、非操作時にスライド部材のスライド操作を不可にし、操作時にスライド部材のスライド操作を可能にするグリップレバーを備え、ハンドルを片手で握ってグリップレバーを操作した状態でスライド部材をスライド操作させることで、トリガーレバーのロックを解除する。
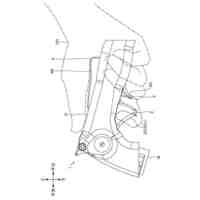
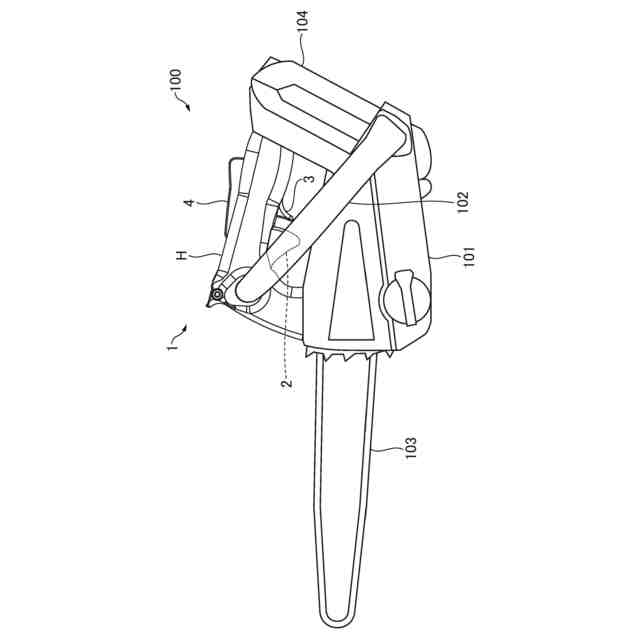
【選択図】図1
特許請求の範囲
【請求項1】
電動式手持ち形作業機のハンドルに設けられる操作レバー機構であって、
電動作業部を起動するためのトリガーレバーと、
前記ハンドルの延設方向にスライド自在に設けられ、非操作時に前記トリガーレバーの動きをロックし、スライド操作によって前記トリガーレバーのロックを解除するスライド部材と、
前記ハンドルを片手で握ることで操作され、非操作時に前記スライド部材のスライド操作を不可にし、操作時に前記スライド部材のスライド操作を可能にするグリップレバーを備え、
前記ハンドルを片手で握って前記グリップレバーを操作した状態で前記スライド部材をスライド操作させることで、前記トリガーレバーのロックを解除する、電動式手持ち形作業機の操作レバー機構。
続きを表示(約 840 文字)
【請求項2】
前記グリップレバーは、前記ハンドルを片手で握る動作により前記スライド部材のスライド操作後の状態を保持する、請求項1に記載された電動式手持ち形作業機の操作レバー機構。
【請求項3】
前記ハンドルの内部には、前記スライド部材の動きに連動する連動部材が設けられ、
前記連動部材は、前記グリップレバーと前記スライド部材の非操作時には、前記スライド部材の動きに伴う自身の動きを前記グリップレバーの一部に干渉させることで、前記スライド部材の操作を不可にし、前記グリップレバーの操作時には、前記グリップレバーの一部と自身との干渉を外すことで前記スライド部材の操作を可能にする、請求項1に記載された電動式手持ち形作業機の操作レバー機構。
【請求項4】
前記連動部材は、前記スライド部材のスライド操作に連動して、前記グリップレバーの操作時の状態に対して前記スライド部材の操作時の状態を保持する、請求項3に記載された電動式手持ち形作業機の操作レバー機構。
【請求項5】
前記トリガーレバーと前記スライド部材と前記グリップレバーは、非操作状態にバネ付勢されている、請求項1に記載された電動式手持ち形作業機の操作レバー機構。
【請求項6】
前記トリガーレバーは、前記ハンドルを片手で握った状態で人差し指にて操作できる位置に設けられ、
前記スライド部材は、前記ハンドルを片手で握った状態で中指又は薬指にて操作できる位置に設けられ、
前記グリップレバーは、前記ハンドルを片手で握った状態で掌にて操作できる位置に設けられる、請求項1に記載された電動式手持ち形作業機の操作レバー機構。
【請求項7】
前記スライド部材は、指で操作する操作突起部が前記トリガーレバーに近接することで、前記トリガーレバーのロックを解除する、請求項6に記載された電動式手持ち形作業機の操作レバー機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動式手持ち形作業機の操作レバー機構に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
刈払機、ヘッジトリマー、チェーンソーなど、手持ち形の作業機は、操作者が手で把持するハンドルに作業部を起動させるトリガーレバーが設けられている。このトリガーレバーは、操作者の意図しない動きを排除して安全性を確保するために、非操作時にレバーの動きをロックする機構が一般に設けられている。また、電動式の手持ち形作業機は、アイドリング状態がエンジン音で確認できるエンジン式と比較して、即座に起動可能な状態か否かを操作者が認識し難い問題がある。このため、電動式手持ち形作業機では、意図的な2段階の操作を行わない限りトリガーレバーのロックが解除されないといった、安全対策が規格にて義務付けられている(IEC規格62841-1参照)。
【0003】
前述した規格に対応した従来技術としては、ロック解除の誤操作を避けるために、ハンドルを握る操作のみではロック解除レバーの押し込みができない機構であり、ハンドル側面のボタンを押す操作を追加することでロック解除レバーの押し込みが可能になる機構が提案されている(下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
米国特許第9636792号明細書
【発明の概要】
【発明が解決しようとする課題】
【0005】
前述した従来技術は、ハンドル側面のボタンを押す操作の方向とハンドルを握ることで行われるロック解除レバーの操作の向きが別方向になっている。このため、誤操作を起こし難い機構になってはいるものの、ハンドルを片手で握りながら別方向の2操作を行うことになり、操作者はトリガーレバーのロック解除に煩雑な操作を強いられることになる。
【0006】
特に、片手でハンドルを握りながら別途ボタン操作を行うためには、親指を使ってボタン操作を行うことが必要になる。ボタン操作のためにハンドルの握りから親指を離すと、片手でハンドルを握る際のグリップ力が低下する。このため、従来技術は、機体重量が大きい場合に、グリップ力の低下で大きな重量を片手で安定して支えられなくなり、円滑にボタン操作を行うことができなくなる問題があった。
【0007】
また近年、環境や騒音などへの配慮から、エンジン式の手持ち形作業機を電動化する傾向がある。エンジン式の手持ち形作業機は、前述したようにアイドリング状態を操作者が認識できることから、トリガーレバーに対しての安全対策が電動式程厳しくない。このためエンジン式の手持ち形作業機は、比較的簡単にロック解除操作を行ってトリガーレバーを操作することができる。電動化に際しては、前述した電動式の安全規格に対応したロック解除操作が必要になるが、ユーザからは、安全規格に対応していながら、エンジン式と同程度の操作性になることが求められている。
【0008】
本発明は、このような問題に対処するために提案されたものである。すなわち、電動式手持ち形作業機の操作レバー機構において、ロック解除操作の安全規格に対応しながら、エンジン式と同程度の操作性が確保できるようにすること、ハンドルを片手で握った状態でグリップ力の低下を招くことなく、操作性良く、トリガーレバーのロック解除を行うことができるようにすること、などが、本発明の課題である。
【課題を解決するための手段】
【0009】
このような課題を解決するために、本発明は、以下の構成を具備するものである。
電動式手持ち形作業機のハンドルに設けられる操作レバー機構であって、電動作業部を起動するためのトリガーレバーと、前記ハンドルの延設方向にスライド自在に設けられ、非操作時に前記トリガーレバーの動きをロックし、スライド操作によって前記トリガーレバーのロックを解除するスライド部材と、前記ハンドルを片手で握ることで操作され、非操作時に前記スライド部材のスライド操作を不可にし、操作時に前記スライド部材のスライド操作を可能にするグリップレバーを備え、前記ハンドルを片手で握って前記グリップレバーを操作した状態で前記スライド部材をスライド操作させることで、前記トリガーレバーのロックを解除する、電動式手持ち形作業機の操作レバー機構。
【発明の効果】
【0010】
前述した特徴によると、トリガーレバーのロック解除には、グリップレバーの操作とスライド部材のスライド操作の2操作が必要になるが、ハンドルを片手で握った状態で、グリップレバーとスライド部材とトリガーレバーを簡易に操作することができる。また、トリガーレバーとグリップレバーとスライド部材は、親指を使わないで操作することができ、ハンドルを片手で握った状態でグリップ力の低下を招くことなく、操作性良く、トリガーレバーのロック解除を行うことができる。これにより、電動式手持ち作業機の操作レバー機構において、ロック解除操作の安全規格に対応しながら、エンジン式と同程度の操作性を確保することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社やまびこ
バッテリー溶接機
2か月前
株式会社やまびこ
電動式手持ち形作業機の操作レバー機構
3日前
個人
固定補助具
10日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
2か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
株式会社不二越
ロボットシステム
4日前
住友重機械工業株式会社
教示装置
1か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
7日前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
5日前
トヨタ自動車株式会社
カプラ接続治具
14日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
積水ハウス株式会社
フィルム除去具
26日前
ホシデン株式会社
分解用治具
2か月前
アピュアン株式会社
衝撃工具
2か月前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
5日前
株式会社リコー
多関節ロボット
2か月前
株式会社不二越
協働ロボットシステム
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
20日前
コネクテッドロボティクス株式会社
保持システム
28日前
セイコーエプソン株式会社
ロボット
10日前
セイコーエプソン株式会社
ロボット
4日前
セイコーエプソン株式会社
ロボット
今日
株式会社マキタ
打撃工具
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ