TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025126543
公報種別
公開特許公報(A)
公開日
2025-08-29
出願番号
2024022813
出願日
2024-02-19
発明の名称
把持補助具、把持装置及び産業用ロボット
出願人
ニッタ株式会社
代理人
弁理士法人ドライト国際特許事務所
主分類
B25J
15/10 20060101AFI20250822BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のワークを効率よく把持することができる把持補助具、把持装置及び産業用ロボットを提供する。
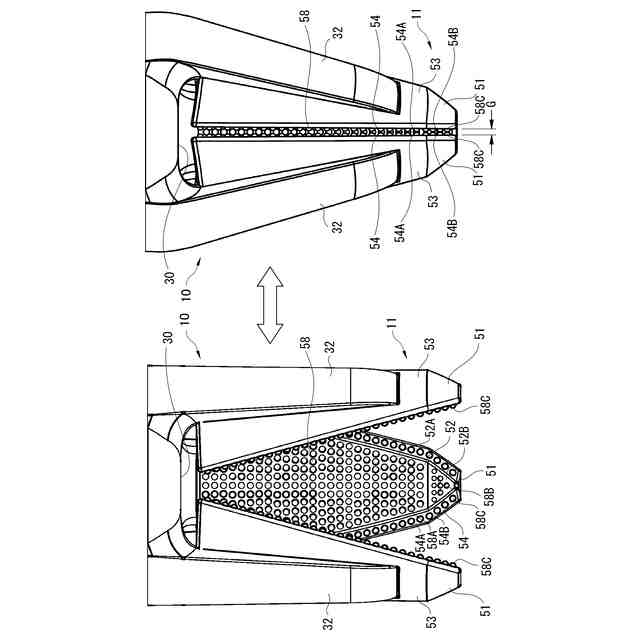
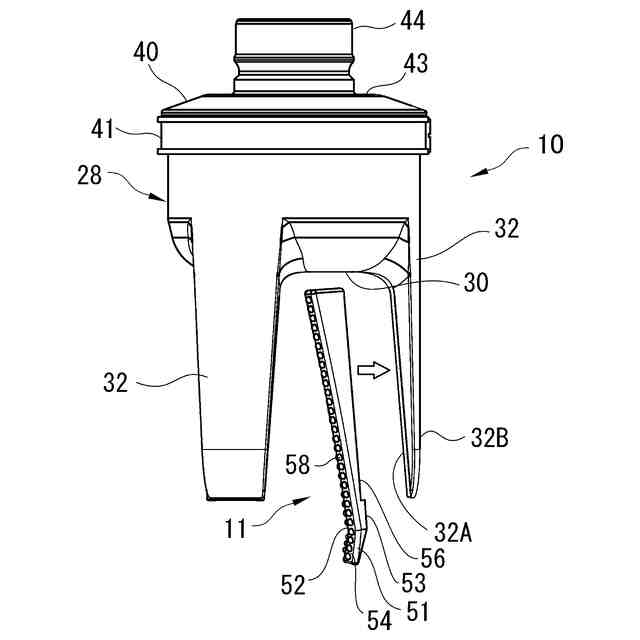
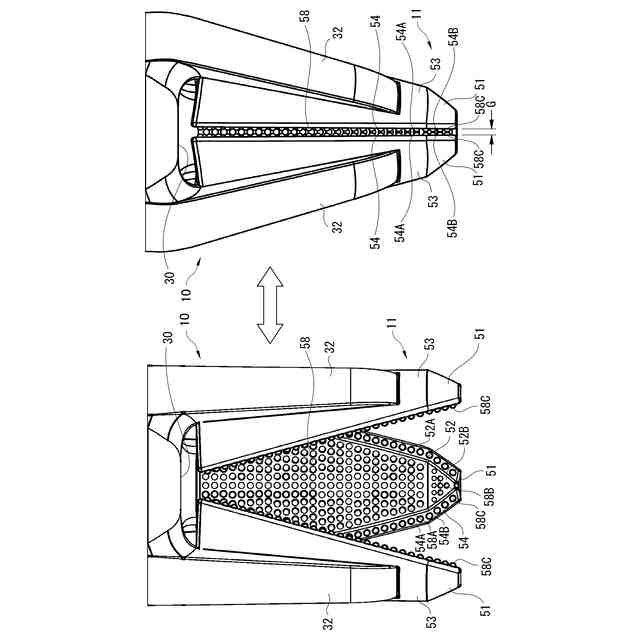
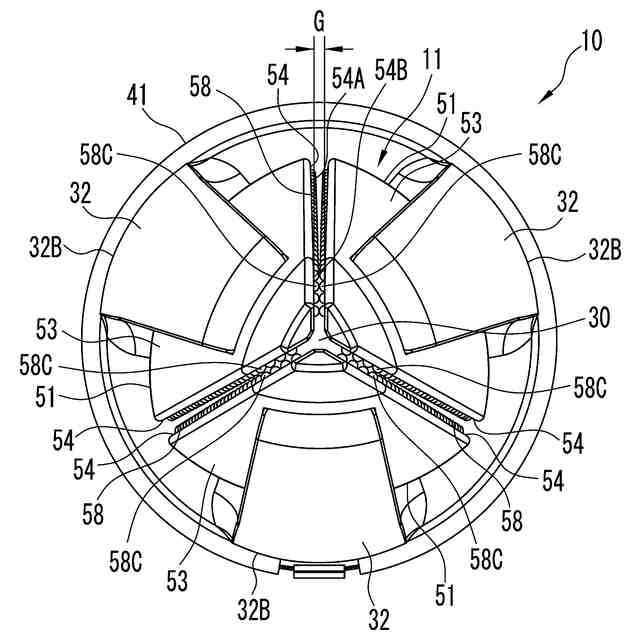
【解決手段】掌部30と、掌部30の周囲に突出して設けられ、掌部30を厚さ方向に変形させることにより掌部30に向かって倒れる複数の指部32とを備える把持装置10に取り付けられる把持補助具11であって、複数の指部32の各々に取り付けられる複数の補助具本体51を備え、複数の補助具本体51の各々は、複数のワークに接する把持面52と、把持面52に隣接する側面54とを有し、複数の指部32が掌部30に向かって倒れた閉状態において、複数の補助具本体51の各々の側面54同士が互いに対面し、複数の補助具本体51の各々の把持面52で複数のワークを把持する。
【選択図】図5
特許請求の範囲
【請求項1】
掌部と、前記掌部の周囲に突出して設けられ、前記掌部を厚さ方向に変形させることにより前記掌部に向かって倒れる複数の指部とを備える把持装置に取り付けられる把持補助具であって、
前記複数の指部の各々に取り付けられる複数の補助具本体を備え、
前記複数の補助具本体の各々は、複数のワークに接する把持面と、前記把持面に隣接する側面とを有し、
前記複数の指部が前記掌部に向かって倒れた閉状態において、前記複数の補助具本体の各々の前記側面同士が互いに対面し、前記複数の補助具本体の各々の前記把持面で前記複数のワークを把持する把持補助具。
続きを表示(約 710 文字)
【請求項2】
前記把持面は、第1把持面と、前記第1把持面から延びて前記第1把持面に対し傾斜した第2把持面とを有する請求項1に記載の把持補助具。
【請求項3】
前記側面は、前記第1把持面に隣接する第1側面と、前記第2把持面に隣接する第2側面とを有し、
前記閉状態において、前記複数の補助具本体の各々の前記側面同士が互いに対面したときの前記第2側面同士の隙間が5mm以下である請求項2に記載の把持補助具。
【請求項4】
前記複数の補助具本体の各々に設けられた複数の突起を備える請求項1に記載の把持補助具。
【請求項5】
前記複数の突起は、半球状に形成されており、外径が0.75mm以上3mm以下である請求項4に記載の把持補助具。
【請求項6】
表面が濡れている前記複数のワークを把持する請求項4に記載の把持補助具。
【請求項7】
前記複数の補助具本体の各々は、前記複数の指部の各々の内側の面に取り付けられる請求項1に記載の把持補助具。
【請求項8】
前記複数の指部同士の間隔よりも小さい外径を有するバラバラな前記複数のワークを把持する請求項1に記載の把持補助具。
【請求項9】
掌部と、
前記掌部の周囲に突出して設けられ、前記掌部を厚さ方向に変形させることにより前記掌部に向かって倒れる複数の指部と、
前記複数の指部に取り付けられた請求項1~8のいずれか1項に記載の把持補助具とを備える把持装置。
【請求項10】
請求項9に記載の把持装置を備える産業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、把持補助具、把持装置及び産業用ロボットに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ワークを把持することを目的とした把持装置として、袋状の把持本体を備えた把持装置が知られている(特許文献1)。特許文献1に係る把持装置の把持本体は、掌部と、掌部の周囲に突出して設けられ、掌部を厚さ方向に変形させることにより掌部に向かって倒れる複数の指部とを有する。把持本体は、掌部及び指部が設けられている一端側とは逆の他端側に開口が設けられている。把持本体の開口は、ケースによって密閉されている。ケースは、配管を介して真空発生装置と接続している。特許文献1に係る把持装置は、把持本体の内部が減圧されることにより、掌部が厚さ方向に変形し、複数の指部が掌部へ向かって倒れるように弾性変形する。これにより、複数の指部がワークの表面に接触し、ワークを把持することができる。
【先行技術文献】
【特許文献】
【0003】
特開2023-68961号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に係る把持装置は、複数の指部が掌部に向かって倒れて複数のワークをまとめて把持する場合に、隣接する指部同士の間に生じる隙間からワークがこぼれ落ちることがあった。特許文献1に係る把持装置には、複数のワークを効率よく把持する点に改善の余地があった。
【0005】
本発明は、複数のワークを効率よく把持することができる把持補助具、把持装置及び産業用ロボットを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る把持補助具は、掌部と、前記掌部の周囲に突出して設けられ、前記掌部を厚さ方向に変形させることにより前記掌部に向かって倒れる複数の指部とを備える把持装置に取り付けられる把持補助具であって、前記複数の指部の各々に取り付けられる複数の補助具本体を備え、前記複数の補助具本体の各々は、複数のワークに接する把持面と、前記把持面に隣接する側面とを有し、前記複数の指部が前記掌部に向かって倒れた閉状態において、前記複数の補助具本体の各々の前記側面同士が互いに対面し、前記複数の補助具本体の各々の前記把持面で前記複数のワークを把持する。
【0007】
本発明に係る把持装置は、掌部と、前記掌部の周囲に突出して設けられ、前記掌部を厚さ方向に変形させることにより前記掌部に向かって倒れる複数の指部と、前記複数の指部に取り付けられた上記把持補助具とを備える。
【0008】
本発明に係る産業用ロボットは、上記把持装置を備える。
【発明の効果】
【0009】
本発明によれば、複数のワークを効率よく把持することができる。
【図面の簡単な説明】
【0010】
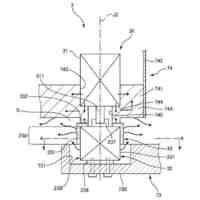
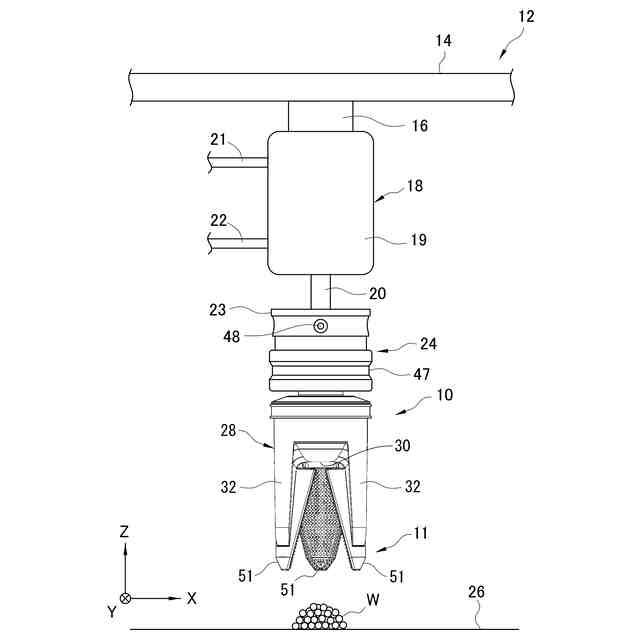
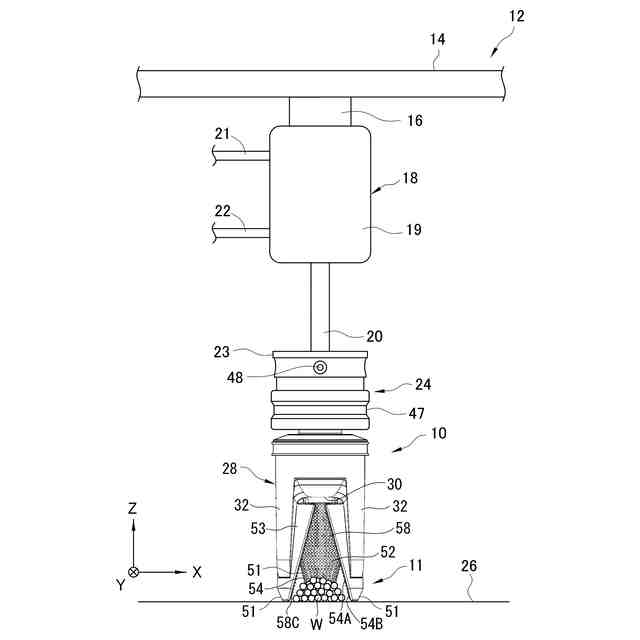
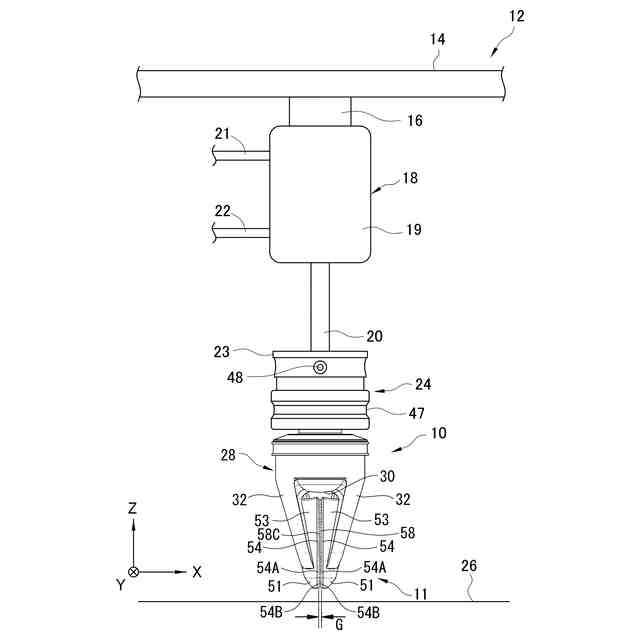
実施形態に係る把持装置を適用した産業用ロボットの例を示す模式図である。
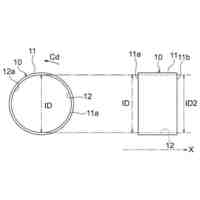
把持装置の正面図である。
把持装置の背面図である。
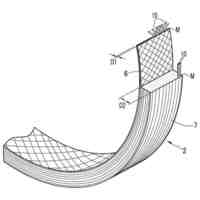
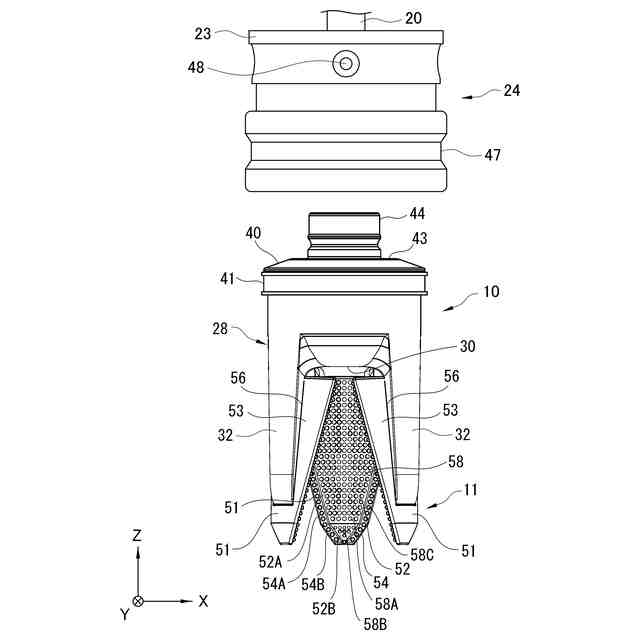
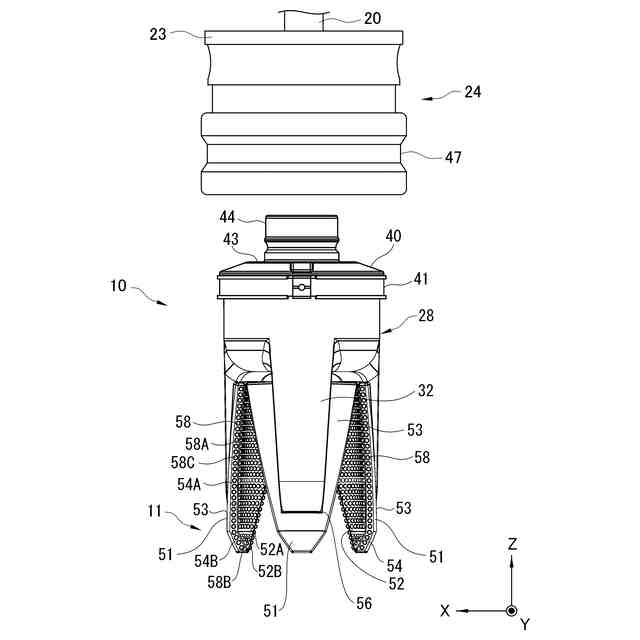
指部に対する把持補助具の取り付け方法の説明図である。
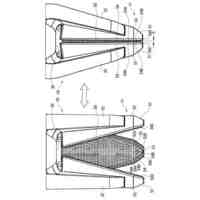
把持装置の開状態と閉状態とを説明するための説明図である。
閉状態の把持装置の底面図である。
把持装置の使用状態を説明するための説明図である。
把持装置の使用状態を説明するための説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ニッタ株式会社
回転部材
22日前
ニッタ株式会社
スリーブ
14日前
ニッタ株式会社
把持補助具、把持装置及び産業用ロボット
5日前
個人
固定補助具
12日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
株式会社不二越
ロボット操作装置
今日
住友重機械工業株式会社
教示装置
1か月前
株式会社不二越
ロボットシステム
6日前
株式会社ダイヘン
搬送装置
2か月前
個人
ペグハンマおよびペグハンマ用部品
2か月前
日本精工株式会社
締結用工具
9日前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
7日前
トヨタ自動車株式会社
カプラ接続治具
16日前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
ホシデン株式会社
分解用治具
2か月前
アピュアン株式会社
衝撃工具
2か月前
積水ハウス株式会社
フィルム除去具
28日前
株式会社マキタ
電気機器
1か月前
オークラ輸送機株式会社
ハンド装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
2か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
7日前
株式会社不二越
ロボットシステム
22日前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
セイコーエプソン株式会社
ロボット
6日前
セイコーエプソン株式会社
ロボット
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ