TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025123500
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2025105759,2021064927
出願日
2025-06-23,2021-04-06
発明の名称
作業エリア設定システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20250815BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の自動運転制御をより行いやすくするための技術を提供すること。
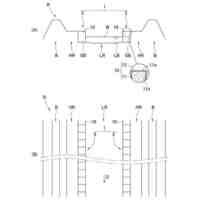
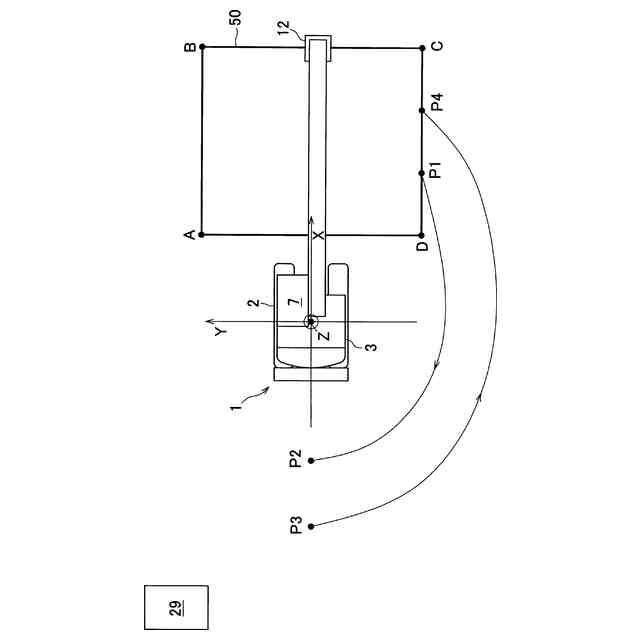
【解決手段】作業エリア50のエリア外からエリア内へ、および/または作業エリアのエリア内からエリア外へ、作業機械1のアタッチメント4の先端が移動するときの先端が経由する経由ポイントを決定するアタッチ先端経由位置決定部30を備える。経由ポイントは、持ち上げ旋回開始点(P1)または復帰旋回終了点P4である。アタッチメント4は、持ち上げ旋回開始点P1と持ち上げ旋回終了点P2との間の軌跡領域、および、復帰旋回開始点P3と復帰旋回終了点P4との間の軌跡領域で、ティーチング指示とは異なる指示よりもティーチング指示を優先して移動される。
【選択図】図2
特許請求の範囲
【請求項1】
作業機械により作業される作業対象物が積まれる所定範囲の位置を示すデータである作業エリアを設定するためのエリア設定部と、
前記作業エリアのエリア外からエリア内へ、および/または前記作業エリアのエリア内からエリア外へ、前記作業機械のアタッチメントの先端が移動するときの当該先端が経由する経由ポイントを決定するアタッチ先端経由位置決定部と、
前記作業対象物およびその周囲のデータを取得する三次元計測装置と、
前記三次元計測装置で取得された計測データから、前記作業エリアに存在する前記作業対象物の位置、範囲、および形状に関する三次元情報を算出する演算部と、
前記作業対象物に対して前記アタッチメントが作業を開始する位置である作業開始位置を、前記演算部で算出された前記三次元情報に基づいて決定する作業位置決定部と、
を備え、
前記アタッチメントの前記先端が通る点には、
前記アタッチメントが持ち上げ旋回を開始するときの前記点である持ち上げ旋回開始点と、
前記アタッチメントが前記持ち上げ旋回を終了するときの前記点である持ち上げ旋回終了点と、
前記アタッチメントが復帰旋回を開始するときの前記点である復帰旋回開始点と、
前記アタッチメントが前記復帰旋回を終了するときの前記点である復帰旋回終了点と、
があり、
前記経由ポイントは、前記持ち上げ旋回開始点、または前記復帰旋回終了点であり、
前記アタッチメントは、前記持ち上げ旋回開始点と前記持ち上げ旋回終了点との間の軌跡領域、および、前記復帰旋回開始点と前記復帰旋回終了点との間の軌跡領域で、ティーチング指示とは異なる指示よりも前記ティーチング指示を優先して移動され、
前記アタッチメントは、前記復帰旋回開始点から前記復帰旋回終了点へ移動された後、前記復帰旋回終了点から前記作業開始位置へ、前記作業対象物の状況に応じて移動される、
作業エリア設定システム。
続きを表示(約 120 文字)
【請求項2】
請求項1に記載の作業エリア設定システムにおいて、
前記アタッチ先端経由位置決定部は、前記経由ポイントを、平面視において前記作業エリアのエリア外との境界の上に決定する、
作業エリア設定システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業エリア設定システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
作業機械の自動運転化技術における作業対象物の検出技術に関し、特許文献1には、ホイールローダから掘削対象である地山までの距離、または地山の安息角を、三次元計測装置の計測データに基づいて算出する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2019-178599号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
例えば、三次元計測装置の検知エリア内に地山が複数存在する場合を想定する。この場合、特許文献1に記載の技術では、掘削対象の演算対象範囲を特定することが難しい。また、作業機械の自動運転において繰り返し作業を作業機械に行わせる場合を想定する。この場合、作業機械の制御が容易となるように繰り返し作業における作業機械の動きを区分けすることが望ましい。
【0005】
本発明の目的は、作業機械の自動運転制御をより行いやすくするための技術を提供することである。
【課題を解決するための手段】
【0006】
本発明に係る作業エリア設定システムは、作業機械により作業される作業対象物が積まれる所定範囲の作業エリアを設定するためのエリア設定部を備える。
【0007】
本発明に係る作業対象物検出システムは、上記作業エリア設定システムに加えて、前記作業対象物およびその周囲のデータを取得する三次元計測装置と、前記三次元計測装置で取得された計測データから、前記作業エリアに存在する前記作業対象物の位置、範囲、および形状に関する三次元情報を算出する演算部と、を備える。
【発明の効果】
【0008】
本発明によれば、作業機械の自動運転制御をより行いやすくすることができる。
【図面の簡単な説明】
【0009】
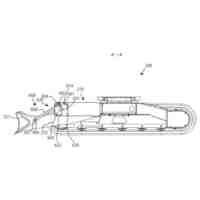
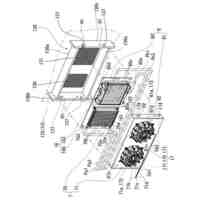
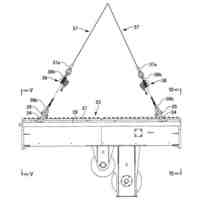
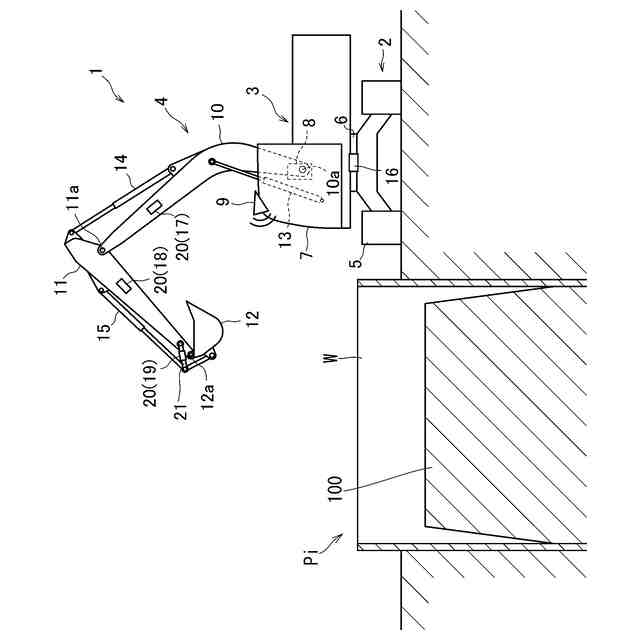
作業機械である油圧ショベルと作業対象物である土砂山とを示す側面図である。
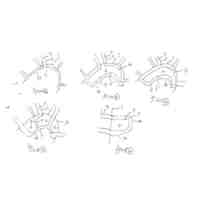
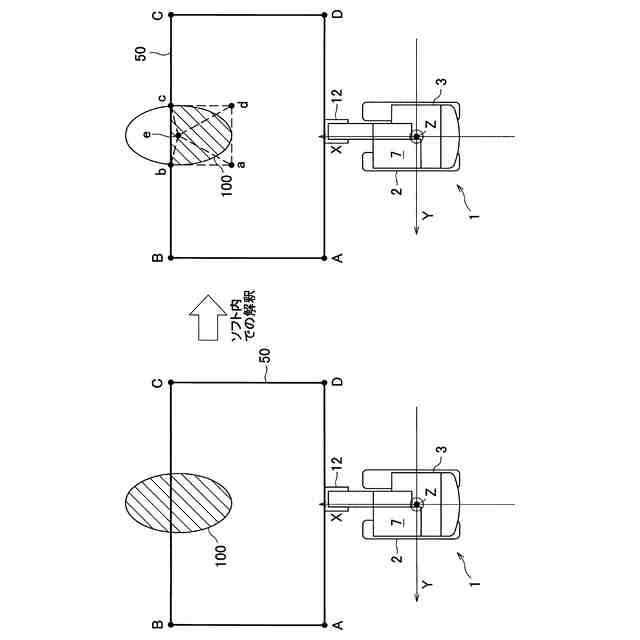
作業エリアの設定手順などを説明するための平面図である。
土砂山の位置、範囲、および形状に関する三次元情報を図2に示す作業エリアに追加した平面図である。
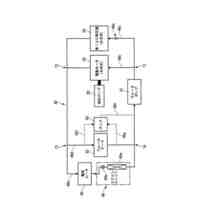
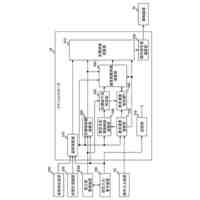
作業対象物検出システムを構成する油圧ショベルに搭載されたコントローラのブロック図である。
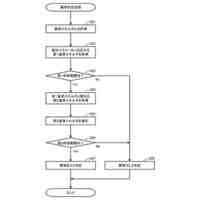
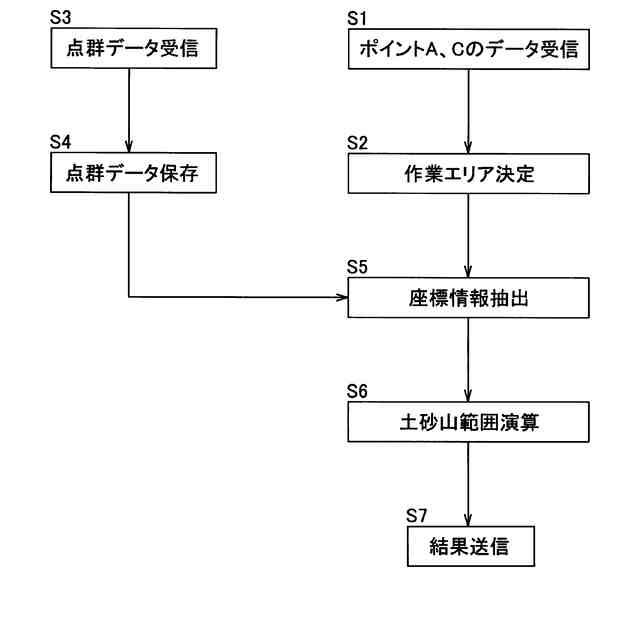
図4に示す検出コントローラ内の処理を示すフローチャートである。
作業エリアと作業エリアのエリア外とに土砂山がまたがって存在している場合の、土砂山の位置、範囲、および形状に関する三次元情報の算出処理を説明するための平面図である。
作業エリアと作業エリアのエリア外とに土砂山がまたがって存在している場合の、土砂山の位置、範囲、および形状に関する三次元情報の算出処理を説明するための平面図である。
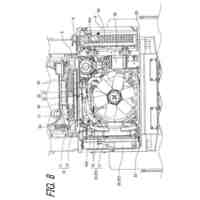
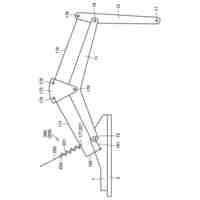
第2実施形態の図1相当図である。
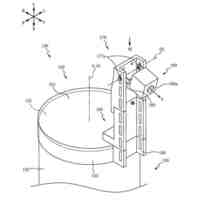
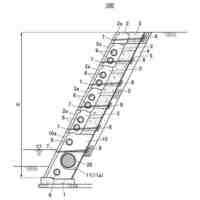
第2実施形態の図3相当図である。
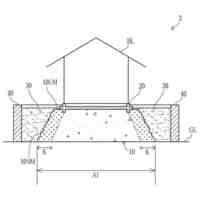
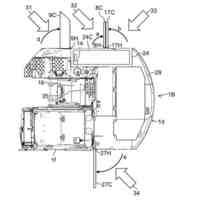
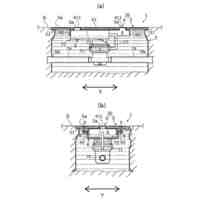
図9のF10-F10矢視図である。
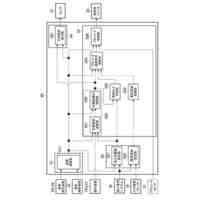
第2実施形態の図4相当図である。
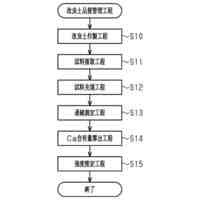
図9に示す作業エリアおよび図10に示す作業初期高さなどの設定のフローチャートである。
図11に示すコントローラによる処理を示すフローチャートである。
【発明を実施するための形態】
【0010】
(第1実施形態)
以下、本発明を実施するための形態について図面を参照しつつ説明する。以下の説明では、作業機械として油圧ショベル1を例にとって説明する。第1実施形態の作業エリア設定システムおよび作業対象物検出システムについて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
大都市防災設備
8日前
個人
簡易免震構造
1か月前
日立建機株式会社
作業機械
14日前
大成建設株式会社
新設構造物
13日前
個人
水底地盤の天地返し工法と専用作業船
10日前
株式会社大林組
基礎構造
10日前
ヤンマーホールディングス株式会社
作業機械
13日前
日本車輌製造株式会社
建設機械
27日前
株式会社クボタ
作業機
20日前
株式会社クボタ
作業車両
1か月前
株式会社本久
改良地盤構築方法
21日前
ヤンマーホールディングス株式会社
作業機械
3日前
株式会社久保製作所
河川構造物
1か月前
日立建機株式会社
作業機械
29日前
日立建機株式会社
建設機械
15日前
住友金属鉱山株式会社
タンク設置用基礎
3日前
株式会社地盤改良堀田
基礎杭の設置方法
7日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
6日前
日立建機株式会社
電動式建設機械
1か月前
株式会社大林組
改良土の品質管理方法
15日前
前田工繊株式会社
繊維製布団篭
24日前
株式会社フジタ
建築物とその施工方法
20日前
株式会社山幸総建
シートパイルの土砂除去具
8日前
株式会社日立建機ティエラ
建設機械
7日前
日本精機株式会社
施工管理システム及び施工管理方法
24日前
ナブテスコ株式会社
建設機械の関節機構
27日前
日本車輌製造株式会社
建設機械の組立方法
3日前
アクアインテック株式会社
メーターボックスの蓋
13日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
2日前
アロン化成株式会社
排水管通気設備
8日前
株式会社丸和
連結金具セット、及び連結方法
29日前
株式会社小松製作所
作業機械
1か月前
日本車輌製造株式会社
取付具
24日前
株式会社竹中工務店
基礎梁
1か月前
日立建機株式会社
作業機械
2日前
西松建設株式会社
護岸ブロック及び護岸構造物
21日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ