TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025121444
公報種別
公開特許公報(A)
公開日
2025-08-20
出願番号
2024016814
出願日
2024-02-07
発明の名称
ロボット制御装置及びロボットシステム
出願人
ニデックインスツルメンツ株式会社
代理人
個人
,
個人
主分類
B25J
9/18 20060101AFI20250813BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット制御装置で使用するファームウェアのバージョンやロボット制御装置に格納されたロボットの個体差に関するデータなどによらずに、ロボットに接続されるロボット制御装置を容易に交換できるようにする。
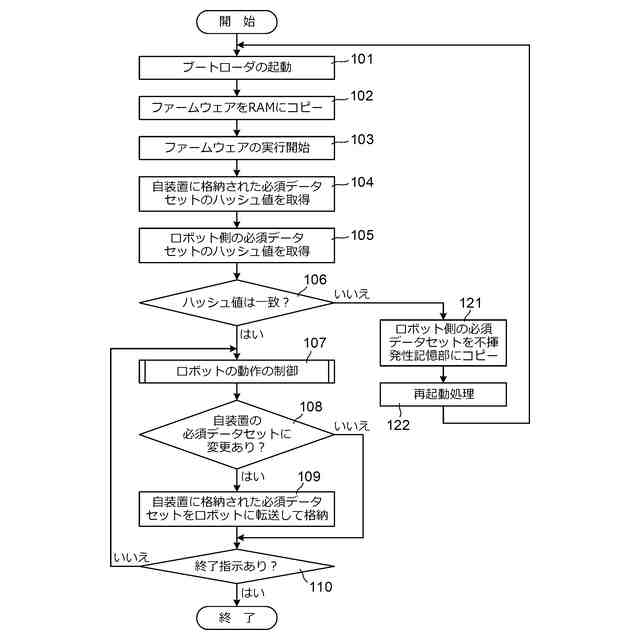
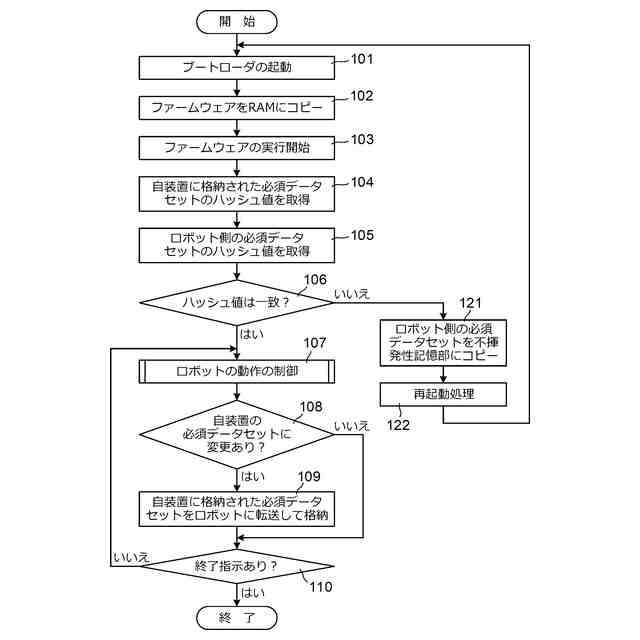
【解決手段】ロボットの制御に必要な一群のプログロム及びデータを必須データセットとして、ロボット制御装置の起動時に、ロボットに設けられた不揮発性メモリに既に格納されている必須データセットとロボット制御装置の不揮発性記憶部に格納されている必須データセットとを照合し(ステップ104-106)、不一致であるときにロボット側の必須データセットによってロボット制御装置に格納されている必須データセットを上書きする(ステップ121)。
【選択図】図2
特許請求の範囲
【請求項1】
不揮発性の第1記憶部を備えるロボットに対して交換可能に接続されて前記ロボットを制御するロボット制御装置であって、
プロセッサと、
前記プロセッサに接続するRAMと、
前記ロボットの制御に必要な一群のプログロム及びデータである必須データセットを保持する、不揮発性メモリからなる第2記憶部と、
を有し、
起動時に、前記第1記憶部に既に格納されている前記必須データセットと前記第2記憶部に格納されている前記必須データセットとを照合する照合処理と、前記照合処理の結果、不一致であるときに、前記第1記憶部に格納されている前記必須データセットによって前記第2記憶部に格納されている前記必須データセットを上書きする上書き処理と、を実行する、ロボット制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記ロボット制御装置によってロボットの制御を行っているときに前記必須データセットに変更があったときに、変更後の前記必須データセットを前記第2記憶部に格納するとともに前記ロボットに転送して前記第1記憶部に格納する、請求項1に記載のロボット制御装置。
【請求項3】
前記必須データセットには、前記ロボット制御装置の起動時に前記第2記憶部から前記RAMに読み込まれて前記RAMに常駐するファームウェアが含まれ、
前記ファームウェアは、前記照合処理を実施し、前記照合処理の結果、不一致であるときに、前記上書き処理を行って前記ロボット制御装置を再起動する、請求項1または2に記載のロボット制御装置。
【請求項4】
前記照合処理は、前記第1記憶部に格納されている前記必須データセットに対して算出したハッシュ値と前記第2記憶部に格納されている前記必須データセットに対して算出したハッシュ値とを比較する処理である、請求項1または2に記載のロボット制御装置。
【請求項5】
前記必須データセットは複数のブロックから構成され、前記ブロックごとに前記ハッシュ値が算出して前記照合処理において使用する、請求項4に記載のロボット制御装置。
【請求項6】
前記上書き処理において、前記照合処理の結果、不一致であると判定された前記ブロックに関してのみ前記第1記憶部に格納されている前記必須データセットによって前記第2記憶部に格納されている前記必須データセットを上書きする、請求項5に記載のロボット制御装置。
【請求項7】
ロボットと、前記ロボットに対して交換可能に接続されて前記ロボットを制御するロボット制御装置とを有するロボットシステムであって、
前記ロボットは、前記ロボット制御装置からアクセス可能な不揮発性の第1記憶部を備え、
前記ロボット制御装置は、プロセッサと、前記プロセッサに接続するRAMと、前記ロボットの制御に必要な一群のプログロム及びデータである必須データセットを保持する、不揮発性メモリからなる第2記憶部と、を備え、
前記ロボット制御装置の起動時に、前記ロボット制御装置において、前記第1記憶部に既に格納されている前記必須データセットと前記第2記憶部に格納されている前記必須データセットとを照合する照合処理と、前記照合処理の結果、不一致であるときに、前記第1記憶部に格納されている前記必須データセットによって前記第2記憶部に格納されている前記必須データセットを上書きする上書き処理と、が実行される、ロボットシステム。
【請求項8】
前記ロボット制御装置によってロボットの制御を行っているときに前記必須データセットに変更があったときに、変更後の前記必須データセットが前記第2記憶部に格納されるとともに前記ロボットに転送されて前記第1記憶部に格納される、請求項7に記載のロボットシステム。
【請求項9】
前記必須データセットには、前記ロボット制御装置の起動時に前記第2記憶部から前記RAMに読み込まれて前記RAMに常駐するファームウェアが含まれ、
前記ロボット制御装置において前記ファームウェアは、前記照合処理を実施し、前記照合処理の結果、不一致であるときに、前記上書き処理を行って前記ロボット制御装置を再起動する、請求項7または8に記載のロボットシステム。
【請求項10】
必須データセットは、同一の機構のロボットであれば共通であって個体差を無視できる情報である共通構成情報と、同一の機構のロボットであっても個体差が無視できないパラメータである個体差パラメータとをさらに含む、請求項9に記載のロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボット(以下、単に「ロボット」と呼ぶ)に関し、特に、ロボットの制御を行うロボット制御装置と、ロボットとロボット制御装置とを組み合わせて構成されるロボットシステムとに関する。
続きを表示(約 3,600 文字)
【背景技術】
【0002】
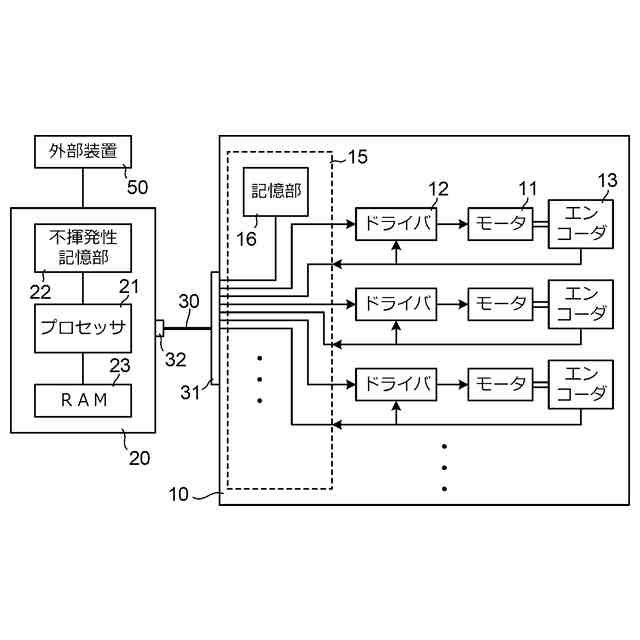
ロボットは、一般に、相互に連結されたアームとそれらの連結部を駆動するモータとからなるマニピュレータと、マニピュレータに取り付けられたハンド(ツールあるいはエンドエフェクタなどともいう)とを備えている。このようなロボットを制御するためにロボット制御装置が用いられる。ロボットとそのロボットを制御するロボット制御装置とによってロボットシステムが構成される。マニピュレータからハンドを取り外せないようなロボットにおいては、マニピュレータにハンドが含まれていると考えてもよく、その場合はロボットはマニピュレータだけで構成されていると考えてもよい。ロボット制御装置は、外部から入力する指令に応じてロボットの各軸のモータを制御する。モータの回転を制御するために、ロボットでは各軸のモータに対してその回転位置を検出するエンコーダが取り付けられており、エンコーダで取得した回転位置情報はロボット制御装置に随時送信される。
【0003】
ロボットを構成するマニピュレータ及びハンドでは、ロボットの機種ごとに、アームやハンドの数や寸法、それらの接続関係、搭載されるモータの仕様などが異なっている。これらのロボットの構成情報は、一般にロボット制御装置に予め記憶されることとなっており、そのため、ロボットの機種ごとにロボット制御装置が用意されることになる。したがってロボット制御装置は、それが対象とする機種以外の機種のロボットをそのままでは制御できない。ある機種用のロボット制御装置を用いて他の機種のロボットを制御しようとするときには、作業者によってロボットの機種を確認し、確認された機種に適合したロボット構成情報にロボット制御装置内の情報を入れ換える作業が必要である。そのため、ロボットの機種ごとにロボット制御装置が用意されることになる。さらに同一機種のロボットであってもロボットごとにどうしても個体差があり、ロボット制御装置によって制御するときは個体差に応じた制御を行なう必要がある。個体差の例として、原点位置に対するオフセット値がある。マニピュレータやハンドにはその動作の基準となる姿勢である原点位置が定められているが、原点位置となるときにモータごとのエンコーダが示す回転位置データは、モータやエンコーダの取り付け上のばらつきなどにより、マニピュレータやハンドの個体ごとに異なる値となってしまう。そこでロボットの組み立て完了時などに個体差を実測し、その後、個体差についてのデータは、ロボット制御装置の記憶部に格納される。このため、同じ機種のロボットを対象とするロボット制御装置であっても、同一機種のロボットを交換して接続する場合には精度の高い制御を行うことができなくなり、ロボット制御装置の再調整が必要となる。このため、同一機種のロボットを交換して接続することは容易ではない。
【0004】
しかしながら、ロボットを使用する場合には、ロボットを使用する作業の効率化を図るとともに、工程の変更や障害発生時などに柔軟に対応できるようにするために、同一機種のロボットに対して当該機種用のロボット制御装置を交換して接続したい、という要望がある。さらに、機種は異なっているものの、ロボット本体としての構成及び制御という観点からは同一の機種といえる、という場合がある。例えば、設置場所に応じてロボットの外装塗料が異なっているときに異なる機種としている場合がある。このような場合には、ロボットとしては異機種であっても同一のロボット制御装置を交換して接続できることが望まれる。
【0005】
ロボット制御装置に接続されるロボットを交換することを可能にする試みとして特許文献1は、ロボットの制御に必要な操作及び設定パラメータを可搬の記憶装置に格納してロボット制御装置に取り外し可能に取付けるようにすることを開示している。特許文献1に記載された技術では、ロボット制御装置に接続されるロボットを交換したときあるいはロボットの一部のアームなどを交換したときに、ロボット制御装置に取付られる記憶装置を、交換後のロボットのパラメータを格納した記憶装置に取り換える。特許文献2は、ロボットに設けられる補助記憶装置にそのロボットの幾何学的誤差データ及びID(識別情報)を格納しておき、接続されるロボットが交換されるたびにロボット制御装置がロボットから幾何学的誤差データ及びIDを読み出して照合することを開示している。ロボット制御装置は、照合の結果、ロボットの交換があったと判定したときは、読み出した幾何学的誤差データに基いて、ロボット制御装置に格納されている動作プログラム中の角度データを修正する。
【0006】
特許文献3は、ロボットに記憶されるデータ量を最小限としつつロボットに対してロボット制御装置を交換して接続することを容易にするために、同一の機構を有するロボットに対して同一ハードウェア識別子を付与した上で、ロボットにはその固有の個体差パラメータとハードウェア識別子とを格納し、ロボット制御装置にはハードウェア識別子に対応する共通構成情報とを格納することを開示している。共通構成情報とは、同一の機構のロボットであれば共通であって個体差を無視できる情報であり、一方、個体差パラメータは、同一の機構のロボットであっても個体差が無視できないパラメータのことである。ロボット制御装置は、接続されているロボットから個体差パラメータとハードウェア識別子とを読み出して、読み出したハードウェア識別子と共通構成情報に対応するハードウェア識別子とを照合し、一致する場合に、記憶している共通構成情報と読み出した個体差パラメータとに基づいてハードウェア定義情報を生成し、ハードウェア定義情報によってロボットを制御する。特許文献3に記載された技術では、個体差パラメータとハードウェア識別子とがロボットにおいて各軸のモータに付属するエンコーダ内の記憶部に格納されるので、ロボットの個体を識別する情報もその記憶部に格納することとすれば、ロボットにおけるモータの交換などを検出することもできる。
【先行技術文献】
【特許文献】
【0007】
特表2001-509441号公報
特開2012-011494号公報
特開2020-179486号公報
特開2003-103482号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1-3に記載された技術によれば、ロボットから見てそのロボットに接続するロボット制御装置を容易に交換することができる。しかしながら、ロボット制御装置の交換を常に行うことができるわけではない。例えば、特許文献3に記載された技術の場合、ロボットの機種に対応した共通構成情報を備えていないロボット制御装置への交換を行うことができない。また、ロボットに実行させる作業内容などに応じてロボットの制御のためにロボット制御装置において実行されるアプリケーションソフトウェアを切り替えることもあるが、そのような場合には、所望のアプリケーションソフトウェアがインストールされていないロボット制御装置への切り替えを行うことはできない。ロボット制御装置のファームウェアは、同じ機種のロボット制御装置であってもその生産時期などに応じてバージョンが異なることがあり、ファームウェアのバージョンが異なるロボット制御装置に交換した場合に、ロボットが実行できる機能などに差が生ずるおそれがある。
【0009】
本発明の目的は、ロボット制御装置におけるファームウェアのバージョンや、ロボット制御装置に格納されているアプリケーションソフトウェア及びデータによらずに、ロボットに接続するロボット制御装置の交換を容易に行うことができるロボット制御装置と、そのようなロボット制御装置を備えたロボットシステムとを提供することにある。
【課題を解決するための手段】
【0010】
本発明の一態様のロボット制御装置は、不揮発性の第1記憶部を備えるロボットに対して交換可能に接続されてロボットを制御するロボット制御装置であって、プロセッサと、プロセッサに接続するRAMと、ロボットの制御に必要な一群のプログロム及びデータである必須データセットを保持する、不揮発性メモリからなる第2記憶部と、を有し、起動時に、第1記憶部に既に格納されている必須データセットと第2記憶部に格納されている必須データセットとを照合する照合処理と、照合処理の結果、不一致であるときに、第1記憶部に格納されている必須データセットによって第2記憶部に格納されている必須データセットを上書きする上書き処理と、を実行する。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
10日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社不二越
ロボットシステム
4日前
個人
ペグハンマおよびペグハンマ用部品
2か月前
川崎重工業株式会社
ロボット
1か月前
日本精工株式会社
締結用工具
7日前
トヨタ自動車株式会社
カプラ接続治具
14日前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
5日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
2か月前
住友重機械工業株式会社
支援装置
2か月前
株式会社マキタ
電気機器
1か月前
積水ハウス株式会社
フィルム除去具
26日前
ホシデン株式会社
分解用治具
2か月前
アピュアン株式会社
衝撃工具
2か月前
オークラ輸送機株式会社
ハンド装置
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
株式会社リコー
多関節ロボット
2か月前
ダイハツ工業株式会社
移載治具
5日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社不二越
ロボットシステム
20日前
セイコーエプソン株式会社
ロボット
2か月前
セイコーエプソン株式会社
ロボット
今日
コネクテッドロボティクス株式会社
保持システム
28日前
セイコーエプソン株式会社
ロボット
10日前
セイコーエプソン株式会社
ロボット
4日前
株式会社マキタ
電動工具
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ