TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025118253
公報種別
公開特許公報(A)
公開日
2025-08-13
出願番号
2024013475
出願日
2024-01-31
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
弁理士法人筒井国際特許事務所
主分類
B25C
7/00 20060101AFI20250805BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】利便性が向上した作業機を提供する。
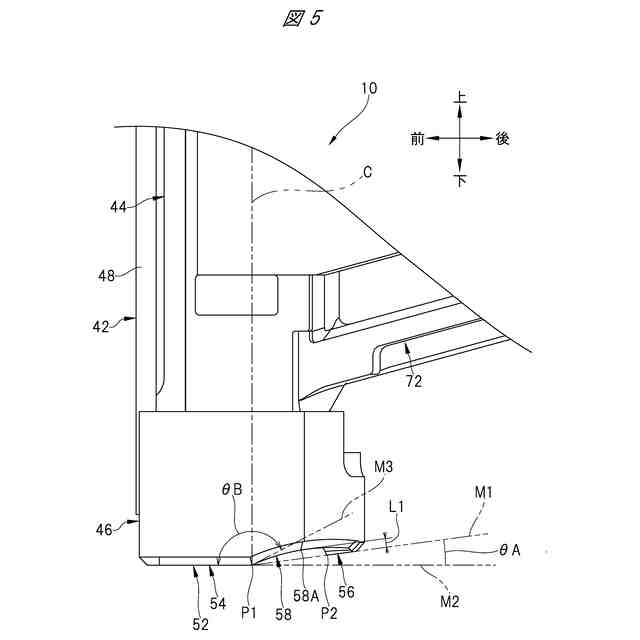
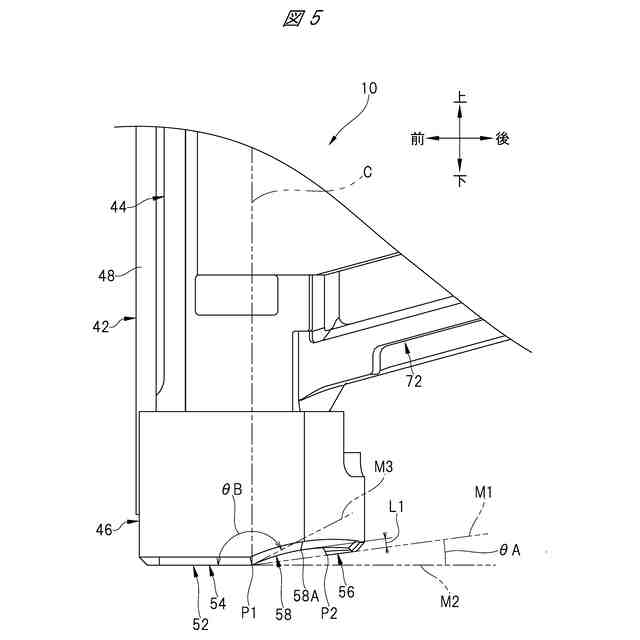
【解決手段】釘打機10は、打撃部と、射出部42と、供給部72と、を備える。射出部42は、打撃部に打撃された釘を上下方向に延びる仮想軸線Cに沿って下側に射出する。供給部72は、射出部42に対して後側に位置する。射出部42は、下側の端部に位置する端面52を有する。端面52は、平坦部54と、後退部56と、切欠部58と、を有する。平坦部54は、仮想軸線Cに対して前側に位置するとともに、仮想軸線Cを取り囲むように延びている。後退部56は、仮想軸線Cに対して後側に位置するとともに、平坦部54に対して上側に位置している。切欠部58は、左右方向から見て、前後方向における平坦部54と後退部56との間に位置するとともに、平坦部54の後端と後退部56の前端とを結んだ仮想線M1から離れて位置している。
【選択図】図5
特許請求の範囲
【請求項1】
止具を打撃する打撃部と、
前記打撃部に打撃された止具を第1方向に延びる仮想軸線に沿って前記第1方向の一方側に射出する射出部と、
前記射出部に対して前記第1方向と直交する第2方向の一方側に位置する作動機構と、を備え、
前記射出部は、前記第1方向の一方側の端部に位置する端面を有し、
前記端面は、
前記仮想軸線に対して前記第2方向の他方側に位置するとともに、前記仮想軸線を取り囲むように延びる平坦部と、
前記仮想軸線に対して前記第2方向の一方側に位置するとともに、前記平坦部に対して前記第1方向の他方側に位置する後退部と、
前記第1方向及び前記第2方向の両方と直交する第3方向から見て、前記第2方向における前記平坦部と前記後退部との間に位置するとともに、前記平坦部の前記第2方向の一方側の端と前記後退部の前記第2方向の他方側の端とを結んだ仮想線から離れて位置する切欠部と、
を有する、作業機。
続きを表示(約 830 文字)
【請求項2】
前記切欠部は、前記第3方向から見て、前記仮想線に対して、前記後退部よりも前記第1方向の他方側に窪んでいる、
請求項1に記載の作業機。
【請求項3】
前記切欠部は、前記端面の前記第3方向における両側に設けられる、
請求項1に記載の作業機。
【請求項4】
前記端面を前記第1方向の一方側から前記第1方向に見て、前記仮想軸線上の1点を中心とする仮想円の中心角を用いて範囲を表すとき、前記切欠部は、前記端面のうち前記中心角が30度以上80度以下の範囲内に設けられている、
請求項1に記載の作業機。
【請求項5】
前記切欠部のうち前記仮想線からの距離が最も長い部分は、前記中心角が35度以上55度以下の範囲内に設けられている、
請求項4に記載の作業機。
【請求項6】
前記平坦部は、前記端面のうち前記中心角が180度以上の範囲に設けられている、
請求項4又は請求項5に記載の作業機。
【請求項7】
前記平坦部は、前記端面のうち前記中心角が180度の範囲に設けられている、
請求項6に記載の作業機。
【請求項8】
前記平坦部の前記第3方向の幅は、前記射出部の射出口の前記第3方向の幅よりも大きい、
請求項1に記載の作業機。
【請求項9】
作業者が掴むハンドルが設けられ、
前記ハンドルは、前記第1方向から見て、前記射出部よりも前記第2方向の一方側に位置している、
請求項1に記載の作業機。
【請求項10】
前記作動機構は、
前記止具を前記射出部における射出位置に向けて移動可能に支持するフィーダと、
前記フィーダを駆動するソレノイドと、
を有する、
請求項1に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1に記載された打込機は、打撃部と、射出部と、プッシュレバーと、コントローラと、を有する。打撃部は、ピストンとドライバブレードとで構成される。射出部には、射出路とプッシュレバーとが設けられている。プッシュレバーが相手材に押し付けられ、上方に移動すると、プッシュレバーからコントローラへ所定の信号が出力される。打撃部に打撃された釘は、射出路を通過し、相手材に打ち込まれる。
【先行技術文献】
【特許文献】
【0003】
特開2023-157401号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の打込機のような作業機を用いて、相手材への釘の打ち込みが行われたとき、巻き上がった粉塵が、射出部内へ侵入することがある。このとき、射出部内に侵入した粉塵を射出部の外側に排出させると、排出された粉塵の一部が作業機の機構部に付着して機構部が動作しにくくなる虞があった。
【0005】
本発明の目的は、利便性が向上した作業機を提供することにある。
【課題を解決するための手段】
【0006】
一実施形態の作業機は、打撃部と、射出部と、作動機構と、を備える。打撃部は、止具を打撃する。射出部は、前記打撃部に打撃された止具を第1方向に延びる仮想軸線に沿って前記第1方向の一方側に射出する。作動機構は、前記射出部に対して前記第1方向と直交する第2方向の一方側位置する。前記射出部は、前記第1方向の一方側の端部に位置する端面を有する。前記端面は、平坦部と、後退部と、切欠部と、を有する。平坦部は、前記仮想軸線に対して前記第2方向の他方側に位置するとともに、前記仮想軸線を取り囲むように延びる。後退部は、前記仮想軸線に対して前記第2方向の一方側に位置するとともに、前記平坦部に対して前記第1方向の他方側に位置する。切欠部は、前記第1方向及び前記第2方向の両方と直交する第3方向から見て、前記第2方向における前記平坦部と前記後退部との間に位置するとともに、前記平坦部の前記第2方向の一方側の端と前記後退部の前記第2方向の他方側の端とを結んだ仮想線から離れて位置する。
【発明の効果】
【0007】
本発明によれば、作業機の利便性を向上させることができる。
【図面の簡単な説明】
【0008】
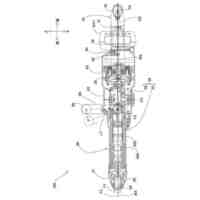
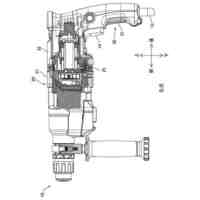
第1実施形態の釘打機の外観を示す右側面図である。
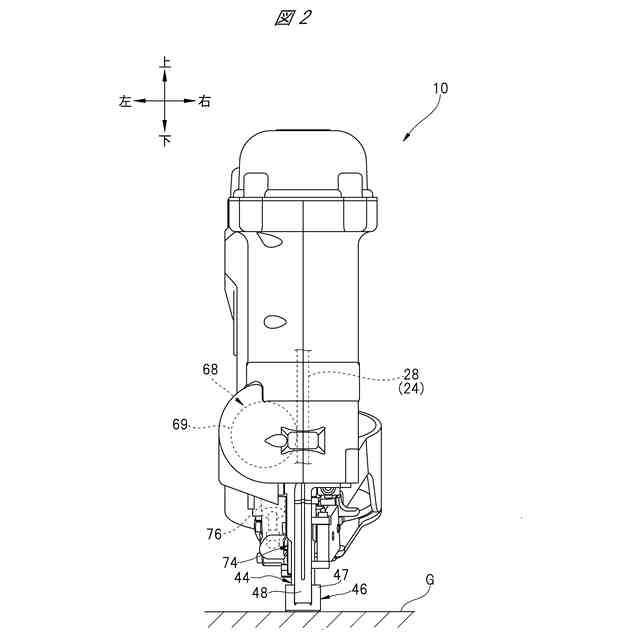
図1の釘打機を前方から見た正面図である。
図1の釘打機を下方から見た底面図である。
図1の釘打機の射出部を拡大した底面図である。
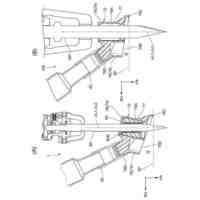
図1の釘打機の射出部を拡大した右側面図である。
図1の釘打機のプッシュレバーが相手材と接触して移動するときの射出部の状態を示す断面図である。
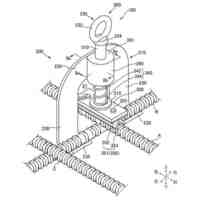
図1の釘打機の切欠部から粉塵が排出される状態を示す斜視図である。
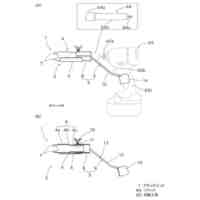
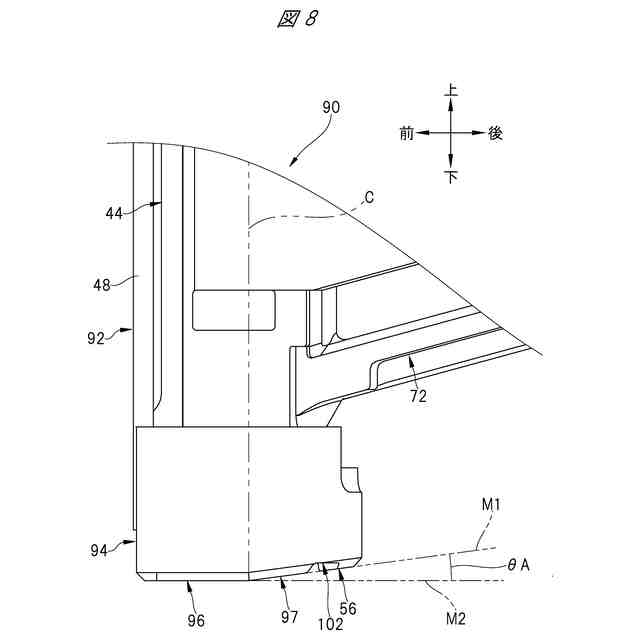
第2実施形態の釘打機の射出部を示す右側面図である。
図8の釘打機の射出部を拡大した底面図である。
図9の釘打機の射出部を斜め下方から見た斜視図である。
第3実施形態の釘打機の射出部を拡大した底面図である。
図11の釘打機のプッシュレバーが相手材と接触して移動するときの射出部の状態を示す断面図である。
【発明を実施するための形態】
【0009】
以下、本発明の第1、第2、第3実施形態及び変形例に係る作業機について、図面を参照しながら詳細に説明する。なお、各実施形態及び変形例を説明するために参照する全ての図面において、同一または実質的に同一の構成や要素には同一の符号を用いる。また、一度説明した構成や要素については、原則として繰り返しの説明は行わない。
【0010】
〔第1実施形態の構成〕
図1には、第1実施形態に係る作業機としての釘打機10が示されている。釘打機10では、所定の条件が満たされた場合、止具の一例である釘Nが、打撃部24によって打撃される。この結果、釘Nが、射出部42から射出されて相手材Gに打ち込まれる。なお、打撃部24及び射出部42の詳細については、後述する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
2日前
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社ダイヘン
搬送装置
1か月前
住友重機械工業株式会社
教示装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
カプラ接続治具
6日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
積水ハウス株式会社
フィルム除去具
18日前
株式会社マキタ
電気機器
1か月前
ホシデン株式会社
分解用治具
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
23日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社清水製作所
電動工具の吊下げ具
27日前
株式会社不二越
ロボットシステム
12日前
SMC株式会社
ベルヌーイグリッパ
1か月前
コネクテッドロボティクス株式会社
保持システム
20日前
セイコーエプソン株式会社
ロボット
2日前
株式会社マキタ
打撃工具
27日前
北越メタル株式会社
鉄筋保持具
23日前
株式会社マキタ
打撃工具
23日前
タイガー産業株式会社
アタッチメント
10日前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
川崎重工業株式会社
作業設備
24日前
日本精工株式会社
駆動装置
11日前
コネクテッドロボティクス株式会社
ロボットシステム
20日前
株式会社永木精機
締結用回動体
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ