TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025114064
公報種別
公開特許公報(A)
公開日
2025-08-05
出願番号
2024008481
出願日
2024-01-24
発明の名称
クランプ装置、エンドエフェクタおよびロボット
出願人
株式会社シュヴァルベル
代理人
主分類
B25J
15/08 20060101AFI20250729BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】エンドエフェクタ等に簡単に設置することができるクランプ装置を提供する。
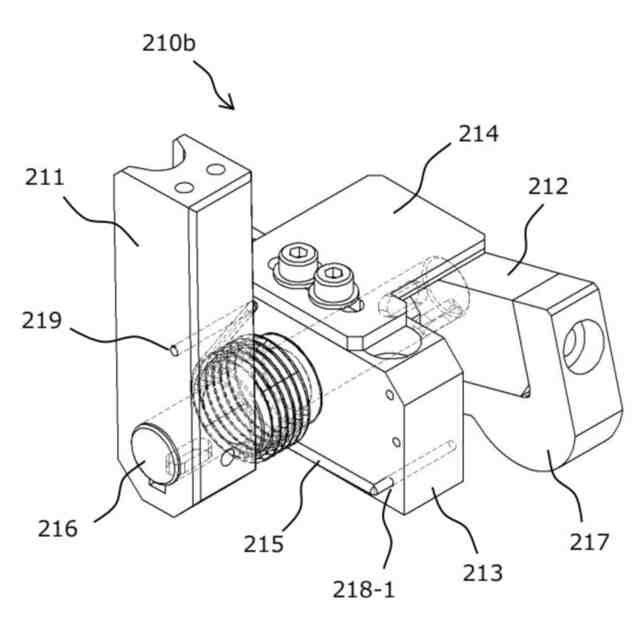
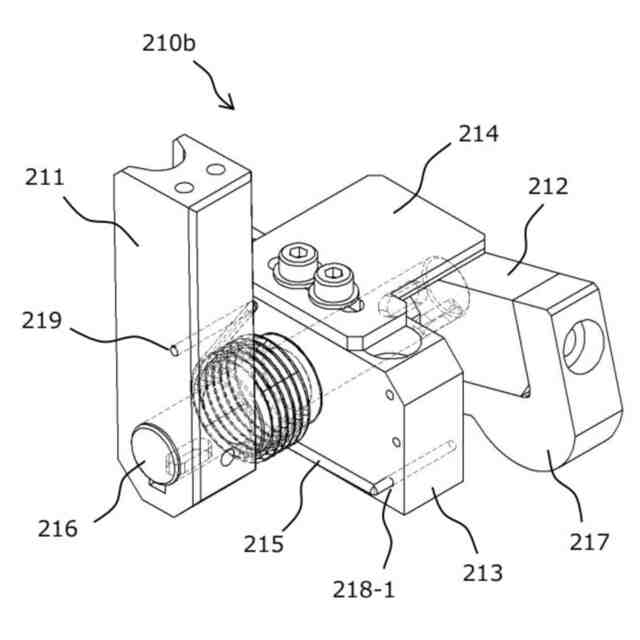
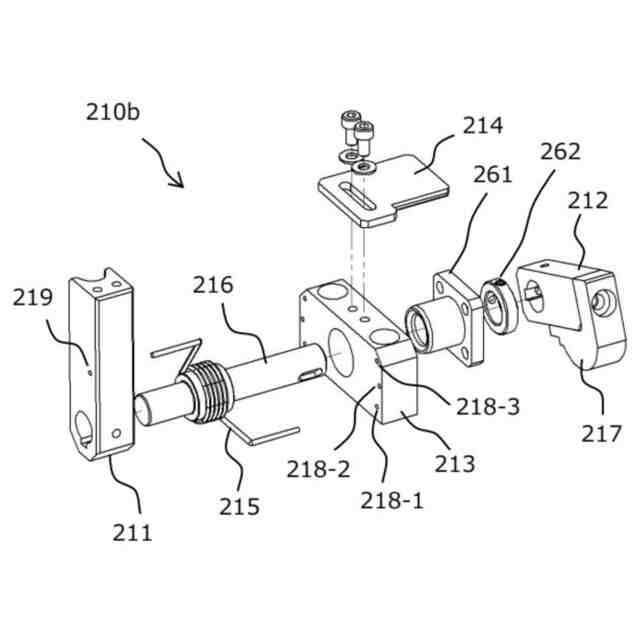
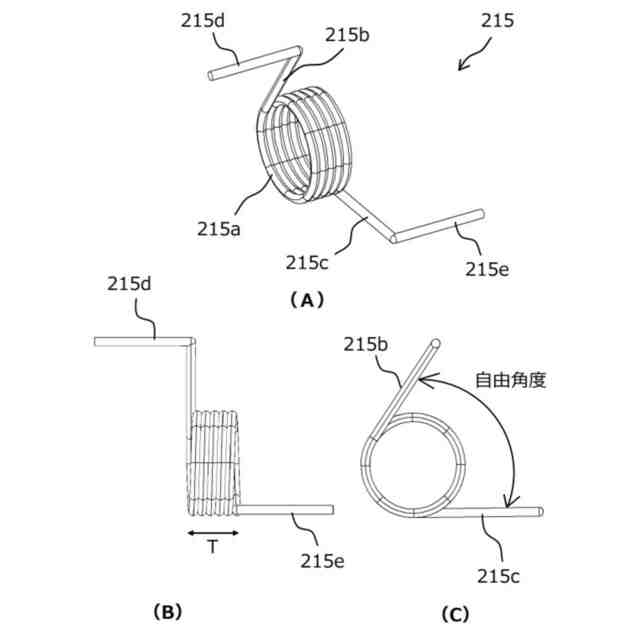
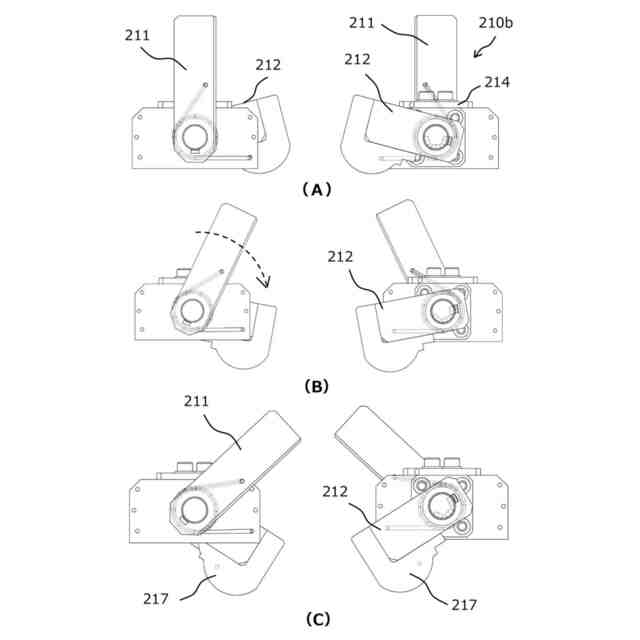
【解決手段】本願発明に係るクランプ装置は、第1のアーム211と、第2のアーム212と、本体部213とを備え、第1のアーム211と第2のアーム212とは本体部213を貫通する連結部材216を介して回転可能に結合されており、第1のアーム211と本体部213とは、ねじりコイルばね215の端がそれぞれ接続されており、ねじりコイルばね215のコイル部には連結部材216が挿入され、第1のアーム211とともに第2のアーム212も回転すると、第2のアーム212の先端に取り付けられた押さえ部217によりワークの一面を押下し、逆に回転すると、ねじりコイルばね215が付勢して第1のアーム211及び第2のアーム212が元の位置に戻る。
【選択図】図6
特許請求の範囲
【請求項1】
第1のアームと、第2のアームと、本体部とを備え、
前記第1のアームと前記第2のアームとは前記本体部を貫通する連結部材を介して回転可能に結合されており、
前記第1のアームと前記本体部とは、ねじりコイルばねの端がそれぞれ接続されており、
前記ねじりコイルばねのコイル部には前記連結部材が挿入され、
前記第1のアームとともに前記第2のアームも回転すると、前記第2のアームの先端に取り付けられた押さえ部によりワークの一面を押下し、
前記回転と逆に回転すると、前記ねじりコイルばねが付勢して前記第1のアーム及び前記第2のアームが元の位置に戻る、
クランプ装置。
続きを表示(約 990 文字)
【請求項2】
前記本体部は、前記ねじりコイルばねの端を接続するための挿通穴を複数有する、請求項1に記載のクランプ装置。
【請求項3】
前記第1のアームは、前記ねじりコイルばねの端を接続するための挿通穴を複数有する、請求項1に記載のクランプ装置。
【請求項4】
前記第1のアームの背面に溝部を備え、前記溝部にアクチュエータのロッドが押し当たることにより前記回転する、請求項1に記載のクランプ装置。
【請求項5】
前記押さえ部が弾性部材からなる、請求項1に記載のクランプ装置。
【請求項6】
前記押さえ部の先端が円形状を含む、請求項1または5に記載のクランプ装置。
【請求項7】
前記本体部に取り付けられる係止部材をさらに備え、前記元の位置において前記第2のアームを係止する、請求項1乃至5のうちのいずれか一項に記載のクランプ装置。
【請求項8】
エンドエフェクタであって、
第1のアームと、第2のアームと、本体部とを備え、
前記第1のアームと前記第2のアームとは前記本体部を貫通する連結部材を介して回転可能に結合されており、
前記第1のアームと前記本体部とは、ねじりコイルばねの端がそれぞれ接続されており、
前記ねじりコイルばねのコイル部には前記連結部材が挿入され、
前記第1のアームとともに前記第2のアームも回転すると、前記第2のアームの先端に取り付けられた押さえ部によりワークの一面を押下し、
前記回転と逆に回転すると、前記ねじりコイルばねが付勢して前記第1のアーム及び前記第2のアームが元の位置に戻る、
クランプ装置を備え、
前記ワークを把持したときに前記押さえ部が前記ワークの一面を押下できる位置に前記クランプ装置が取り付けられる、エンドエフェクタ。
【請求項9】
前記クランプ装置が、前記ワークを把持するための2つの把持爪にそれぞれ取り付けられている、請求項8に記載のクランプ装置。
【請求項10】
前記それぞれ取り付けられた前記クランプ装置に関し、前記第1のアームが互いに連結部材を介して結合される、請求項9に記載のクランプ装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、クランプ装置、エンドエフェクタおよびロボットに関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
今日製造ラインにおいて、人の作業によらない自動化による効率化を目的としてロボットが導入されている。例えば、ワークをある場所から別の場所へとワークを移送するためにロボットを導入して作業が自動化されている(例えば、特許文献1参照。)。特許文献1に記載のロボットの先端にはエンドエフェクタが取り付けられており、エンドエフェクタがワークを把持してワークを別の場所へ移送する。このようなワークを把持して移送するロボットに関し、ワークの把持を確実に行うために様々な工夫がなされている(例えば、特許文献2参照。)。特許文献2に記載のロボットは、ワークを把持するアームに押圧体を備えて、押圧体を調整しつつワークを把持する発明が開示されている。これにより把持力を高めている。
【先行技術文献】
【特許文献】
【0003】
特開2022-138937号公報
特開2022-142908号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一般に、ワークを固定するものとしてはクランプ装置が知られている。例えば上記の特許文献1に記載されているようなロボットのエンドエフェクタにクランプ装置を備えることができれば、より強固にワークを把持することができる。よって、例えばエンドエフェクタに簡単に取り付けられるクランプ装置があればワークを固定し把持力を高めることができるので、そのようなクランプ装置が求められている。
【課題を解決するための手段】
【0005】
上記課題を解決するために、本発明に係るクランプ装置は、第1のアームと、第2のアームと、本体部とを備え、前記第1のアームと前記第2のアームとは前記本体部を貫通する連結部材を介して回転可能に結合されており、前記第1のアームと前記本体部とは、ねじりコイルばねの端がそれぞれ接続されており、前記ねじりコイルばねのコイル部には前記連結部材が挿入され、前記第1のアームとともに前記第2のアームも回転すると、前記第2のアームの先端に取り付けられた押さえ部によりワークの一面を押下し、前記回転と逆に回転すると、前記ねじりコイルばねが付勢して前記第1のアーム及び前記第2のアームが元の位置に戻る、クランプ装置である。
【発明の効果】
【0006】
本発明に係るクランプ装置は上記課題に鑑みてなされたものであり、例えばエンドエフェクタにも簡単に設置することができる。
【図面の簡単な説明】
【0007】
本発明の実施形態に係るロボットの側面図である。
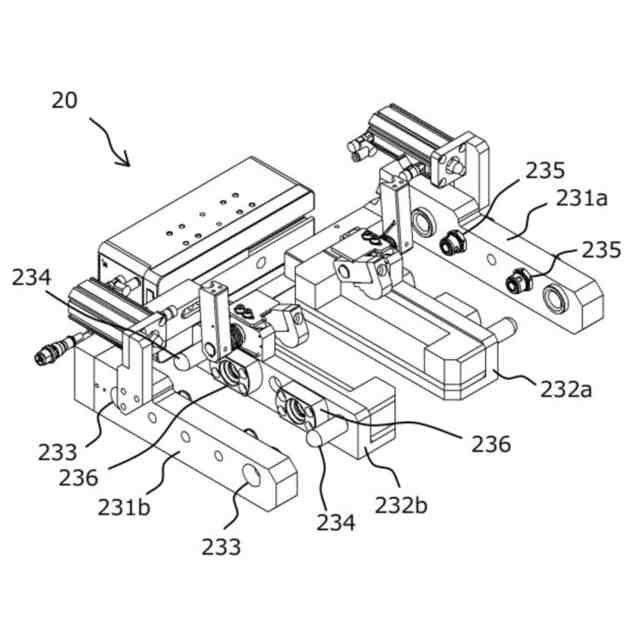
本発明の実施形態に係るエンドエフェクタの斜視図である。
本発明の実施形態に係るエンドエフェクタの斜視図である。
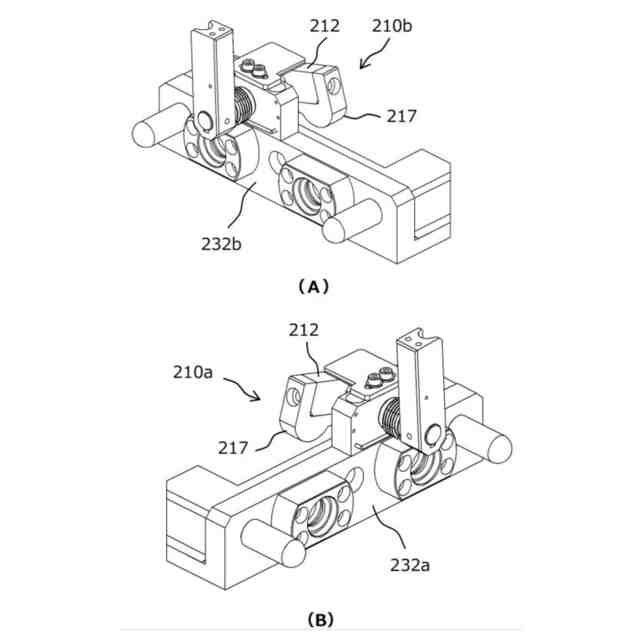
本発明の実施形態に係るエンドエフェクタの別の斜視図である。
本発明の実施形態に係る交換爪の斜視図である。
本発明の実施形態に係るクランプ装置の斜視図である。
本発明の実施形態に係るクランプ装置の分解図である。
本発明の実施形態に係るねじりコイルばねを説明するための図である。
本発明の実施形態に係るクランプ装置の動作を説明するための図である。
本発明の実施形態に係るエンドエフェクタがワークを把持する動作を説明するための斜視図である。
本発明の実施形態に係るクランプ装置によりワークがクランプする動作を説明するための斜視図である。
【発明を実施するための形態】
【0008】
以下、図面を参照しつつ本発明の実施形態について詳細に説明する。本実施形態において、本発明に係るクランプ装置は、ロボットのエンドエフェクタに設置されることを想定している。なお、図面において符号a~dを用いることがあるが、同一数字であれば機能や役割は同様のものである。
【0009】
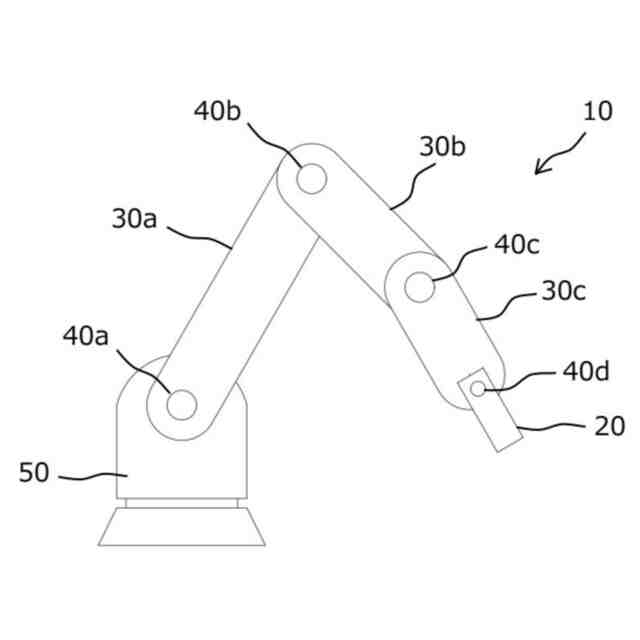
図1は、本発明のクランプ装置が設置されたエンドエフェクタを備えるロボット10の側面図である。図1に示すようにロボット10は多関節式であり、ロボットアーム30a~30cは関節部40a~40dを介してそれぞれ連結される。エンドエフェクタ20は、ワークを把持するためのものであり、関節部40dを介してロボットアーム30cと接続される。ロボットアーム30aは、関節部40aを介して、水平方向に回転可能な固定回転部50に取り付けられる。なお、ロボットのアームや関節部の具体的形式や形態は特に限定されず、エンドエフェクタを取り付けて動作させることができれば、どのような形態であってもよい。
【0010】
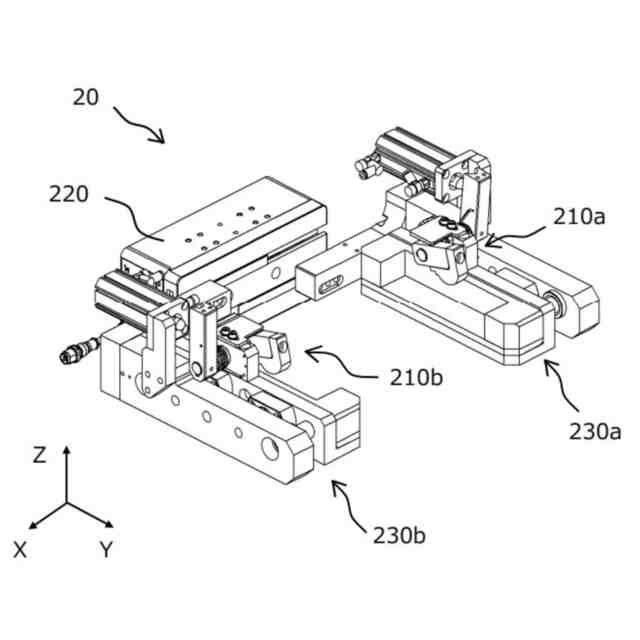
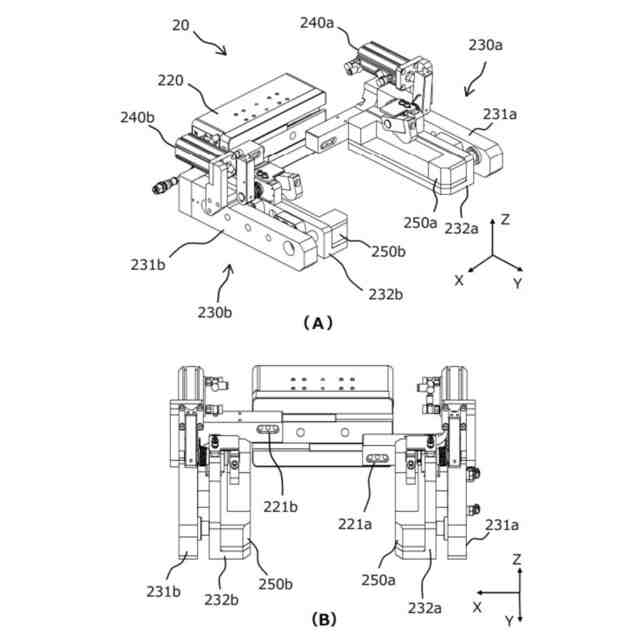
図2は、本発明の実施形態に係るエンドエフェクタ20の斜視図である。図2に示すようにエンドエフェクタ20は、クランプ装置(210a、210b)と、グリッパ装置220と、把持爪(230a、230b)と、から構成される。クランプ装置(210a、210b)は左右対称の関係にある。また、把持爪(230a、230b)も左右対称の関係にある。把持爪(230a、230b)の材質は、ワークの荷重に耐えうるものであればよく、例えばアルミやプラスチック等の樹脂である。クランプ装置(210a、210b)も同様である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
9日前
株式会社ザイテック
吸着装置
2か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社不二越
ロボットシステム
3日前
株式会社ダイヘン
搬送装置
1か月前
日本精工株式会社
締結用工具
6日前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
カプラ接続治具
13日前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
4日前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
2か月前
ホシデン株式会社
分解用治具
1か月前
オークラ輸送機株式会社
ハンド装置
2か月前
積水ハウス株式会社
フィルム除去具
25日前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
4日前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
2か月前
SMC株式会社
ベルヌーイグリッパ
1か月前
株式会社不二越
ロボットシステム
19日前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社ジャノメ
ロボット
2か月前
コネクテッドロボティクス株式会社
保持システム
27日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































