TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112668
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007041
出願日
2024-01-19
発明の名称
センサ位置決定方法
出願人
株式会社SUBARU
,
国立研究開発法人宇宙航空研究開発機構
代理人
弁理士法人青海国際特許事務所
主分類
B64D
45/02 20060101AFI20250725BHJP(航空機;飛行;宇宙工学)
要約
【課題】電界センサの適切な設置位置を決定する。
【解決手段】航空機の機体の表面に生じる電界強度を検出する電界センサの設置位置を決定するセンサ位置決定方法は、機体形状モデルを設定し、複数の候補位置を設定し、平行電極を設定し、決定した相対ピッチ角および相対ロール角において、前記複数の候補位置の各々の候補位置における電界強度を静電界解析により取得し、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更して、前記複数の候補位置の各々の候補位置における電界強度を取得することを、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更する都度繰り返し、前記複数の候補位置のうち、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更するごとに取得された電界強度の分散が相対的に大きい候補位置を特定し、特定した候補位置を前記電界センサの設置位置とする。
【選択図】図11
特許請求の範囲
【請求項1】
航空機の機体の表面に生じる電界強度を検出する電界センサの設置位置を決定するセンサ位置決定方法であって、
静電界解析を行う解析空間において、前記機体の形状を模擬した機体形状モデルを設定し、
前記機体形状モデルにおいて、前記電界センサの設置位置の候補となる複数の候補位置を設定し、
前記解析空間において、電界を発生させる平板状の平行電極を、前記機体形状モデルを間に挟むようにして設定し、
前記平行電極に対する前記機体形状モデルの相対的なピッチ角を示す相対ピッチ角および相対的なロール角を示す相対ロール角を決定し、
決定した相対ピッチ角および相対ロール角において、前記複数の候補位置の各々の候補位置における電界強度を静電界解析により取得し、
相対ピッチ角および相対ロール角のうち少なくともいずれかを変更して、前記複数の候補位置の各々の候補位置における電界強度を取得することを、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更する都度繰り返し、
前記複数の候補位置のうち、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更するごとに取得された電界強度の分散が相対的に大きい候補位置を特定し、特定した候補位置を前記電界センサの設置位置とする、センサ位置決定方法。
続きを表示(約 250 文字)
【請求項2】
前記複数の候補位置のうち、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更するごとに取得された電界強度の分散が相対的に小さい候補位置を特定し、特定した候補位置を、電界強度の基準となる基準電界強度を検出するための前記電界センサであるリファレンス用電界センサの設置位置とする、請求項1に記載のセンサ位置決定方法。
【請求項3】
前記機体形状モデルにおける直撃雷を受け易い位置を、前記複数の候補位置から除外する、請求項1または2に記載のセンサ位置決定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電界センサの設置位置を決定するセンサ位置決定方法に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
例えば、特許文献1には、航空機の機体に、機体の表面に生じる電界強度を検出する電界センサを設けることが開示されている。かかる技術では、電界センサの検出結果に基づいて、航空機の表面電界強度の分布が導出され、その表面電界強度の分布を利用して航空機の姿勢制御を行うことで、落雷の影響を抑制することができる。
【先行技術文献】
【特許文献】
【0003】
特開2021-133860号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1では、電界センサの設置コストおよび運用コストを低減するために、航空機に少数の電界センサを設置するとともに、基準となる電界分布を示す電界分布テーブルが予め準備されている。そして、特許文献1では、少数の電界センサの検出結果と、電界分布テーブルとに基づいて、複数の位置の表面電界強度の分布の推定が行われる。
【0005】
しかし、少数の電界センサを設置する位置によっては、電界センサにより検出される電界強度の精度が低下するおそれがある。電界強度の精度が低下すると、表面電界強度分布を適切に推定することができなくなる。これらより、当該少数の電界センサを、機体の適切な位置に設置する必要がある。
【0006】
そこで、本発明は、電界センサの適切な設置位置を決定することが可能なセンサ位置決定方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の一実施形態に係るセンサ位置決定方法は、
航空機の機体の表面に生じる電界強度を検出する電界センサの設置位置を決定するセンサ位置決定方法であって、
静電界解析を行う解析空間において、前記機体の形状を模擬した機体形状モデルを設定し、
前記機体形状モデルにおいて、前記電界センサの設置位置の候補となる複数の候補位置を設定し、
前記解析空間において、電界を発生させる平板状の平行電極を、前記機体形状モデルを間に挟むようにして設定し、
前記平行電極に対する前記機体形状モデルの相対的なピッチ角を示す相対ピッチ角および相対的なロール角を示す相対ロール角を決定し、
決定した相対ピッチ角および相対ロール角において、前記複数の候補位置の各々の候補位置における電界強度を静電界解析により取得し、
相対ピッチ角および相対ロール角のうち少なくともいずれかを変更して、前記複数の候補位置の各々の候補位置における電界強度を取得することを、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更する都度繰り返し、
前記複数の候補位置のうち、相対ピッチ角および相対ロール角のうち少なくともいずれかを変更するごとに取得された電界強度の分散が相対的に大きい候補位置を特定し、特定した候補位置を前記電界センサの設置位置とする。
【発明の効果】
【0008】
本発明によれば、電界センサの適切な設置位置を決定することが可能となる。
【図面の簡単な説明】
【0009】
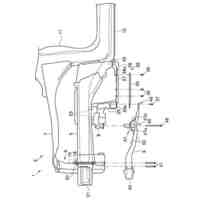
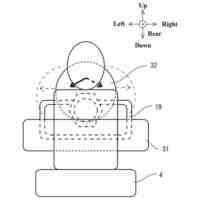
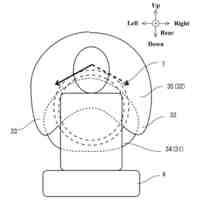
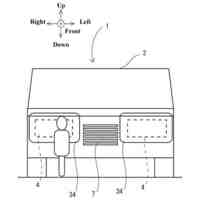
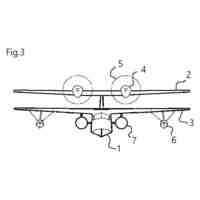
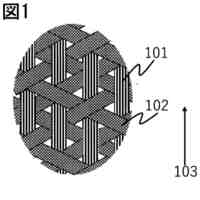
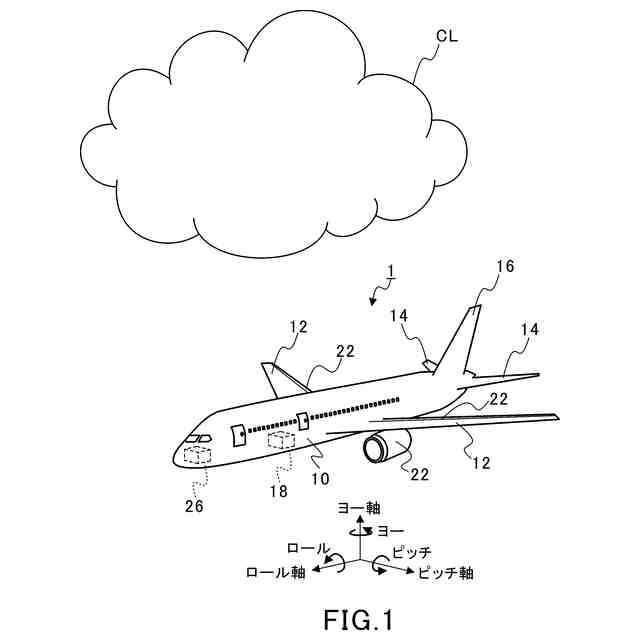
図1は、航空機の概略斜視図である。
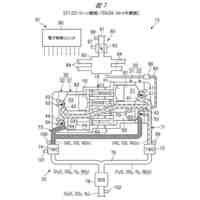
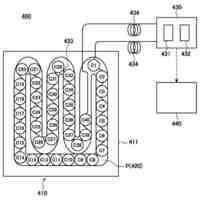
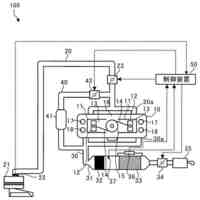
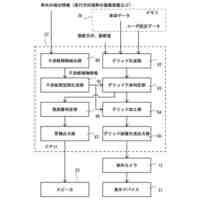
図2は、本実施形態のセンサ位置決定方法を実現するための解析装置の構成を示す概略図である。
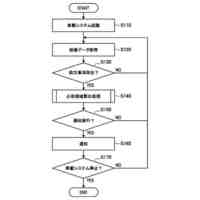
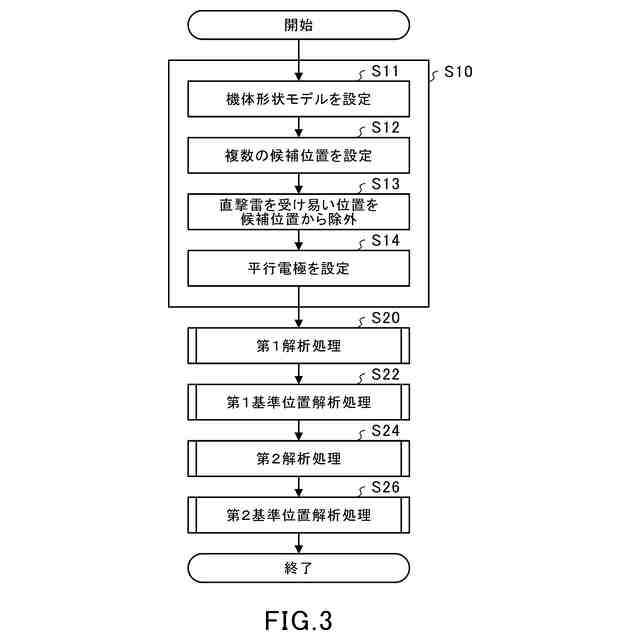
図3は、演算装置の動作の流れを説明するフローチャートである。
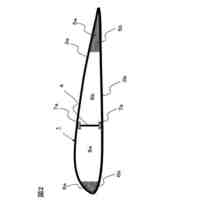
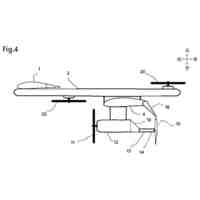
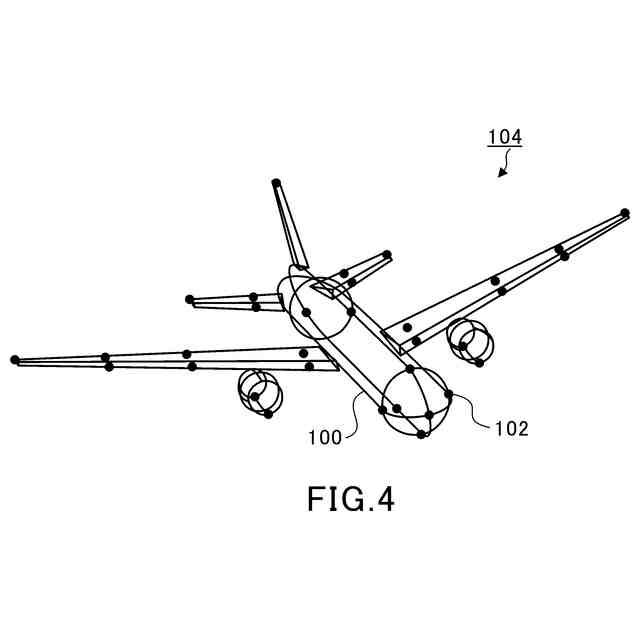
図4は、機体形状モデルおよび複数の候補位置の一例を示す図である。
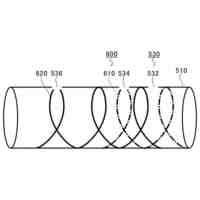
図5は、平行電極の設定の一例を示す図である。
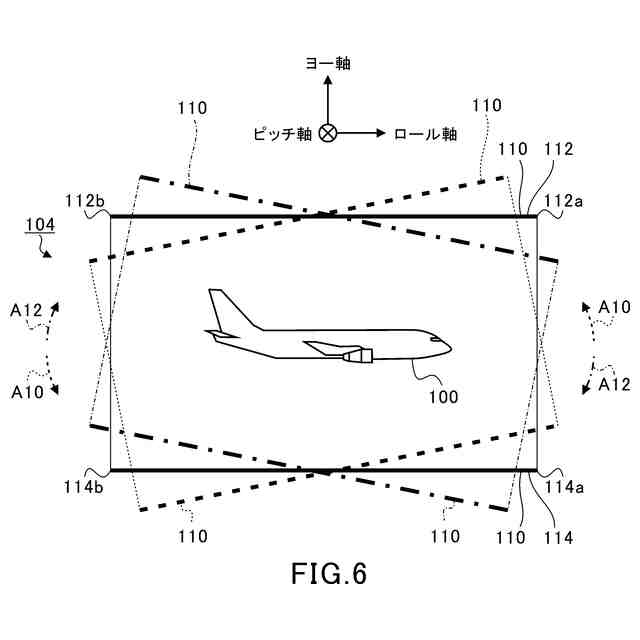
図6は、第1解析処理の概要を説明する図である。
図7は、相対ピッチ角と分散の総和との関係の一例を示す図である。
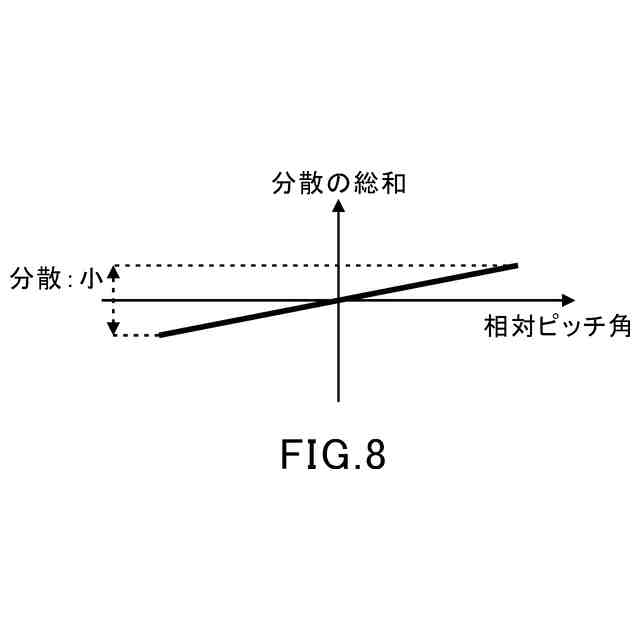
図8は、相対ピッチ角と分散の総和との関係の他の一例を示す図である。
図9は、1つの候補位置における相対ピッチ角と電界強度との関係の一例を示す図である。
図10は、他の1つの候補位置における相対ピッチ角と電界強度との関係の一例を示す図である。
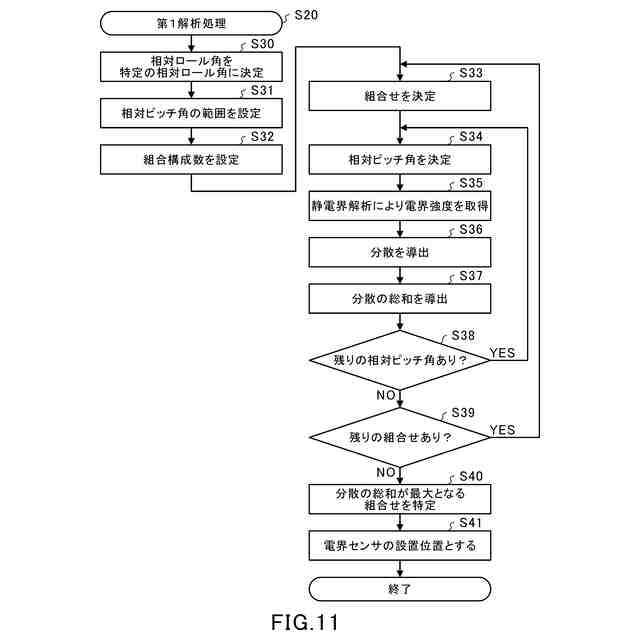
図11は、第1解析処理の流れを説明するフローチャートである。
図12は、第1基準位置解析処理の流れを説明するフローチャートである。
図13は、第1解析処理により決定された電界センサの設置位置、および、第1基準位置解析処理により決定されたリファレンス用電界センサの設置位置の一例を示す図である。
図14は、第2解析処理の概要を説明する図である。
図15は、相対ロール角と分散の総和との関係の一例を示す図である。
図16は、相対ロール角と分散の総和との関係の他の一例を示す図である。
図17は、1つの候補位置における相対ロール角と電界強度との関係の一例を示す図である。
図18は、他の1つの候補位置における相対ロール角と電界強度との関係の一例を示す図である。
図19は、第2解析処理の流れを説明するフローチャートである。
図20は、第2基準位置解析処理の流れを説明するフローチャートである。
図21は、第2解析処理により決定された電界センサの設置位置、および、第2基準位置解析処理により決定されたリファレンス用電界センサの設置位置の一例を示す図である。
図22は、第1解析処理の他の例を説明するフローチャートである。
図23は、第2解析処理の他の例を説明するフローチャートである。
【発明を実施するための形態】
【0010】
以下に添付図面を参照しながら、本発明の実施形態について詳細に説明する。かかる実施形態に示す具体的な寸法、材料、数値等は、発明の理解を容易にするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書および図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社SUBARU
エンジン
12日前
株式会社SUBARU
解析方法
17日前
株式会社SUBARU
潤滑構造
6日前
株式会社SUBARU
無段変速機
14日前
株式会社SUBARU
容器ホルダ
12日前
株式会社SUBARU
前部車体構造
13日前
株式会社SUBARU
電池システム
13日前
株式会社SUBARU
運転支援装置
今日
株式会社SUBARU
車両用警告装置
10日前
株式会社SUBARU
車両用制御装置
11日前
株式会社SUBARU
通気管端部構造
6日前
株式会社SUBARU
エンジンシステム
6日前
株式会社SUBARU
センサ位置決定方法
17日前
株式会社SUBARU
アーチガーニッシュ
5日前
株式会社SUBARU
車両の乗員保護装置
12日前
株式会社SUBARU
車両の乗員保護装置
12日前
株式会社SUBARU
車両のバンパビーム
13日前
株式会社SUBARU
車両の車外保護装置
14日前
株式会社SUBARU
車両の手動運転支援装置
10日前
株式会社SUBARU
車両用バッテリ監視システム
12日前
株式会社SUBARU
可変バルブタイミング機構および車両
17日前
株式会社SUBARU
オイルパイプ組付け用治具、及びオイルパイプの組付け方法
11日前
個人
人工台風
20日前
個人
ドローン
5か月前
個人
着火ドローン
2か月前
個人
救難消防飛行艇
2か月前
個人
ドローンシステム
6か月前
東レ株式会社
中空回転翼
1か月前
個人
導風板付き垂直離着陸機
10日前
個人
連続回転可能な飛行機翼
3か月前
株式会社三圓
浮上装置
11か月前
個人
陸海空用の乗り物
3か月前
東レ株式会社
プロペラブレード
1か月前
東レ株式会社
プロペラブレード
1か月前
個人
ドローンの計測操作方法2
11か月前
個人
空飛ぶクルマ
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ