TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110390
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2025003822
出願日
2025-01-10
発明の名称
パレットまたは送り込みコンベヤに対してロボットを較正する方法
出願人
ファナック アメリカ コーポレイション
代理人
個人
,
個人
,
個人
,
個人
主分類
B25J
9/10 20060101AFI20250718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボット参照座標系を計算するためのシステムおよび方法を提供する。
【解決手段】方法は、第1位置に較正物、例えば箱を置く工程、較正物が第1位置にある時に較正物の中心に対してロボットを位置付けする工程、較正物が第1位置にある時に、ロボットにより較正物を把持する工程、および第1位置を識別する第1位置の値を記録する工程を含む。該方法はさらに、ロボットを使用して第1位置から第2位置まで較正物を移動させる工程、第2位置を識別する第2位置の値を記録する工程、および第1および第2位置の値を用いて第3位置の値を計算する工程を含む。該方法は同様に、第1、第2、および第3位置の値を用いて中間座標系を計算する工程、および中間座標系および較正物の寸法を用いて参照座標系を計算する工程も含んでいる。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットが取上げ物を取上げられるようにするX軸、Y軸、およびZ軸を含む参照座標系を計算するための方法であって、
第1位置に較正物を置く工程と、
前記較正物が前記第1位置にある時に、前記較正物の中心に対して前記ロボットを位置付けする工程と、
前記較正物が前記第1位置にある時に、前記ロボットにより前記較正物を把持する工程と、
前記第1位置を識別する第1位置の値を記録する工程と、
前記ロボットを使用して前記第1位置から第2位置まで前記較正物を移動する工程と、
前記第2位置を識別する第2位置の値を記録する工程と、
前記第1位置の値および前記第2位置の値を用いて第3位置の値を計算する工程と、
前記第1位置の値、前記第2位置の値、および前記第3位置の値を用いてX軸、Y軸、およびZ軸を含む中間座標系を計算する工程と、
前記中間座標系および前記較正物の寸法を用いて前記参照座標系を計算する工程と、を備える、方法。
続きを表示(約 670 文字)
【請求項2】
中間座標系を計算する工程は、FRAMEアルゴリズムを使用する工程を含む、請求項1に記載の方法。
【請求項3】
中間座標系を計算する工程は、第4位置の値を使用する工程を含む、請求項1に記載の方法。
【請求項4】
前記第1位置は、前記ロボットが前記取上げ物を取上げるコンベヤ上の取上げ位置であり、前記第2位置は、前記コンベヤ上の前記取上げ位置の上流側の位置であり、前記第3位置の値が前記コンベヤに対して空間的なところにある、請求項1に記載の方法。
【請求項5】
前記較正物は較正箱であり、前記寸法は前記較正箱の幅、長さ、および高さである、請求項4に記載の方法。
【請求項6】
前記参照座標系は、前記コンベヤの前方右の角または前方左の角にある、請求項4に記載の方法。
【請求項7】
中間座標系を計算する工程は、前記コンベヤの傾斜を補償する工程を含む、請求項4に記載の方法。
【請求項8】
前記第1位置はパレットの角にあり、前記第2位置は前記パレットの別の角にあり、前記第3位置の値は前記パレットのさらに別の角にある、請求項1に記載の方法。
【請求項9】
前記較正物は較正箱であり、前記寸法は前記較正箱の幅、長さ、および高さである、請求項8に記載の方法。
【請求項10】
中間座標系を計算する工程は、前記パレットの傾斜を補償する工程を含む、請求項8に記載の方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
関連出願の相互参照
本出願は、2024年1月12日出願の「パレットまたは送り込みコンベヤに対してロボットを較正する方法」なる名称の米国仮特許出願63/620,392号の出願日の利益を主張するものである。
続きを表示(約 3,200 文字)
【0002】
本開示は、概して、ロボット用の較正参照座標系を決定するためのシステムおよび方法、そして、より特定的には、コンベヤおよびパレットに対するロボット用の較正参照座標系を決定するためのシステムおよび方法に関し、ここで、該方法は、単一の較正箱および該較正箱の2つの記録された位置を利用する。
【背景技術】
【0003】
ロボットは、ピックアンドプレース動作を含めた多数の商業的タスクを行ない、ここでロボットは物を取上げて、1つの位置から別の位置まで移動させる。例えば、ロボットは、コンベヤから箱を取上げて、パレット上に箱を置くか、または、パレットから箱を取上げて、それらをコンベヤ上に置くことができる。ロボットが効果的に箱を取上げるためには、典型的にロボットは、安定した位置で箱を把持するように取り上げている箱の幅、長さ、高さ、および姿勢を知る必要がある。さらに、ロボットは、取り上げつつあるときに箱が位置付けされるかまたは位置付け時に関連付けされることになるコンベヤおよびパレット上の参照座標系または原点を知る必要がある。参照座標系の例示的な位置としては、コンベヤの前方左または前方右の角またはパレットの4つの角のうちの1つが含まれる。
【発明の概要】
【発明が解決しようとする課題】
【0004】
参照座標系を計算するためには、少なくとも3つの既知の空間的な点が必要である。参照座標系を計算するための公知の方法は、パレットおよびコンベヤ上の既知の位置に3つの箱を置き、次に各箱の中心にロボットを移動させてこれらの位置におけるロボットの位置を記録する工程を含み、ここでこれらの点から参照座標系が計算される。しかしながら、参照座標系の計算を行なうために多数の箱が必要であることには、複雑性、時間およびコストの面で明らかな欠点がある。
【課題を解決するための手段】
【0005】
以下の論述では、ロボットが取上げ物、例えば箱を取上げられるようにするX軸、Y軸、およびZ軸を含む参照座標系を計算するためのシステムおよび方法を開示し説明する。該方法は、第1位置に箱のような較正物を置く工程、較正物が第1位置にある時に較正物の中心に対してロボットを位置付けする工程、較正物が第1位置にある時にロボットにより較正物を把持する工程、および第1位置を識別する第1位置の値を記録する工程を含む。該方法はさらに、ロボットを使用して第1位置から第2位置まで較正物を移動させる工程、第2位置を識別する第2位置の値を記録する工程、および第1および第2位置の値を用いて第3位置の値を計算する工程を含む。該方法は同様に、第1、第2および第3位置の値を用いてX軸、Y軸、およびZ軸を含む中間座標系を計算する工程および中間座標系および較正物の寸法を用いて参照座標系を計算する工程をも含んでいる。
【0006】
本開示の追加の特徴は、添付図面と併せて以下の明細書および添付の請求項から明らかになるものである。
【図面の簡単な説明】
【0007】
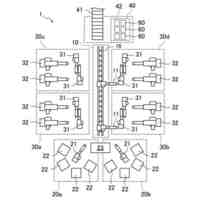
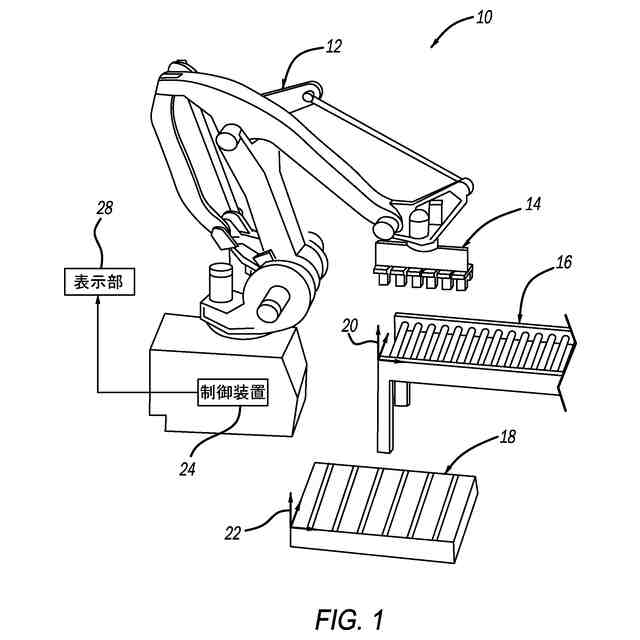
図1は、ロボット、送り込みコンベヤおよびパレットを含むロボットシステムの例である。
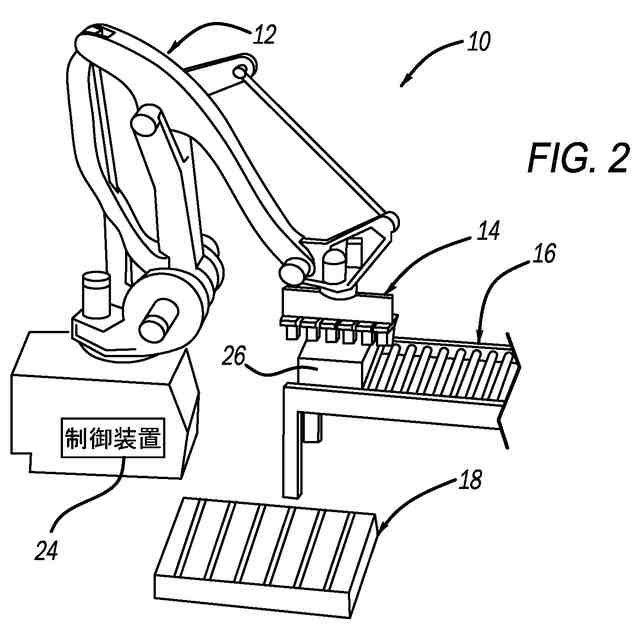
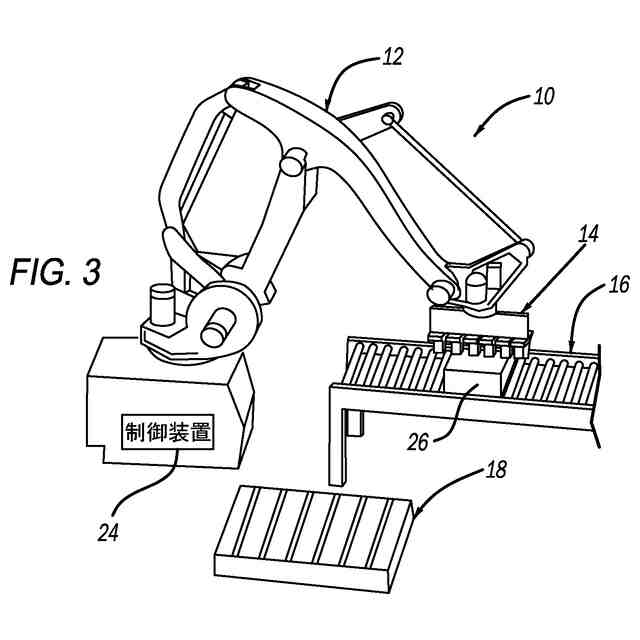
図2は、コンベヤ上の参照座標系を計算するために使用される2つの異なる箱の位置を識別するために、送り込みコンベヤ上の2つの異なる位置の単一の較正箱に対して位置付けされたロボットを示す、図1に描かれたロボットシステムの例である。
図3は、コンベヤ上の参照座標系を計算するために使用される2つの異なる箱の位置を識別するために、送り込みコンベヤ上の2つの異なる位置の単一の較正箱に対して位置付けされたロボットを示す、図1に描かれたロボットシステムの例である。
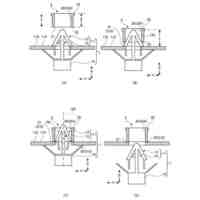
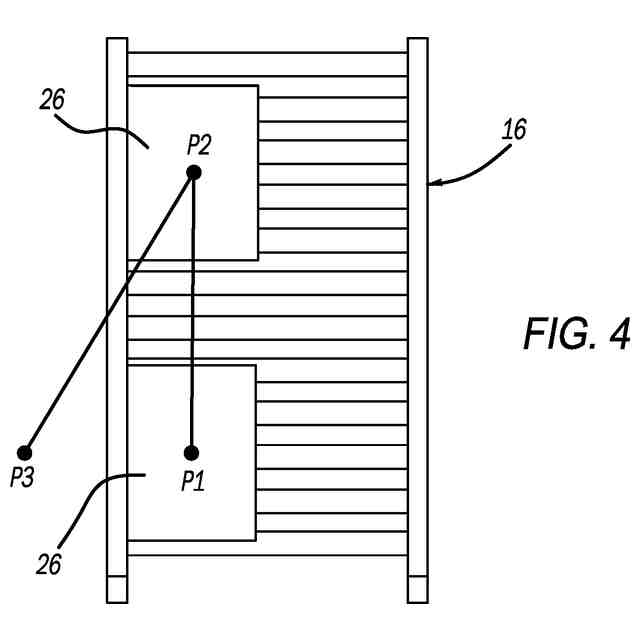
図4は、コンベヤ上の2つの異なる位置における較正箱を示す送り込みコンベヤの上面図である。
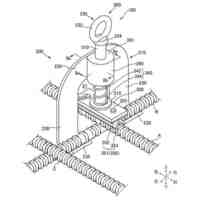
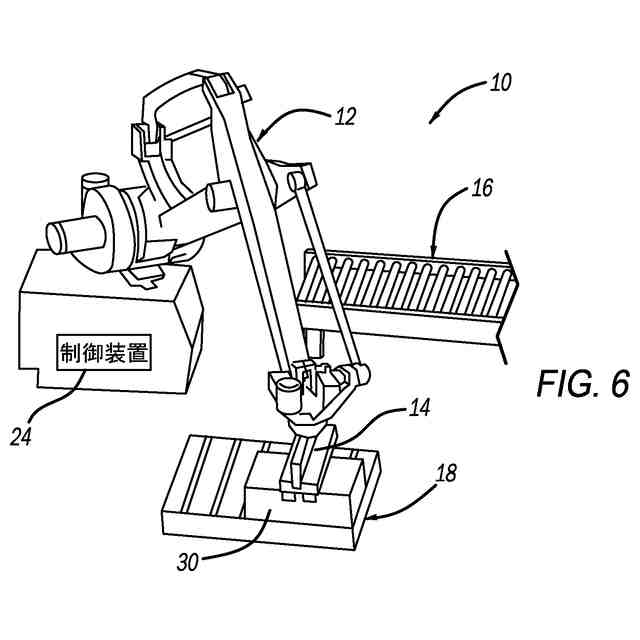
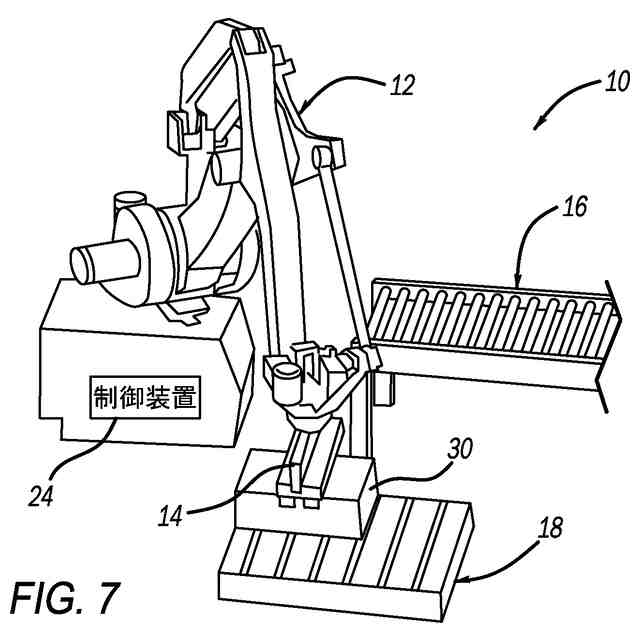
図5は、パレット上の参照座標系を計算するために使用される3つの異なる箱の位置を識別するために、パレット上の3つの異なる位置の単一の較正箱に対して位置付けされたロボットを示す、図1に描かれたロボットシステムの例である。
図6は、パレット上の参照座標系を計算するために使用される3つの異なる箱の位置を識別するために、パレット上の3つの異なる位置の単一の較正箱に対して位置付けされたロボットを示す、図1に描かれたロボットシステムの例である。
図7は、パレット上の参照座標系を計算するために使用される3つの異なる箱の位置を識別するために、パレット上の3つの異なる位置の単一の較正箱に対して位置付けされたロボットを示す、図1に描かれたロボットシステムの例である。
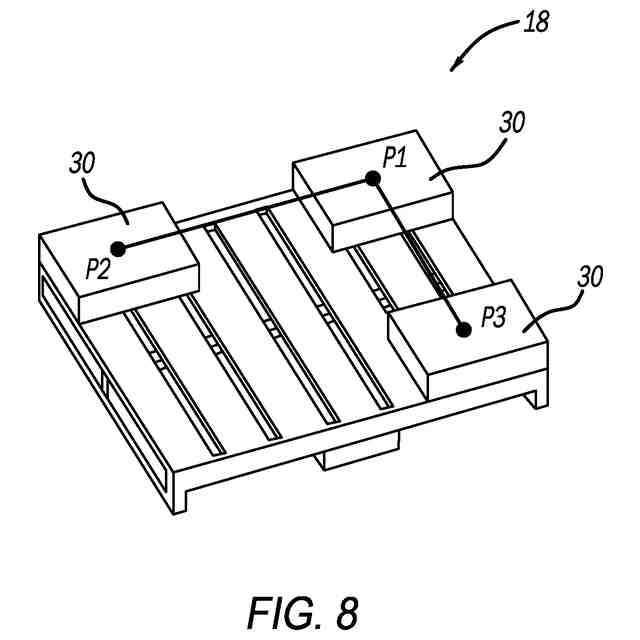
図8は、パレット上の3つの異なる位置にある箱を示すパレットの等角投影図である。
【発明を実施するための形態】
【0008】
コンベヤおよびパレットに対するロボット用の較正参照座標系を決定するためのシステムおよび方法に向けられた本開示の実施形態の以下の論述は、本来、単なる例にすぎず、いかなる形であれ本発明またはその利用分野または使用を限定することを意図したものではない。例えば、説明されるシステムおよび方法は、箱を取上げるロボットのための較正参照座標系を決定するために特定的に適用されるものである。ただし、このシステムおよび方法には他の適用があってよい。
【0009】
図1は、送り込みコンベヤ16から箱などの物を取上げて、それらをパレット18上に置くように、またはパレット18から物を取上げて、それらをコンベヤ16上に置くように構成されている、吸着カップなどのグリッパ14を有するロボット12を含むロボットシステム10の例である。システム10は、本明細書中の論述のために適用可能である任意のタイプのロボットシステムを表わすように意図されており、ここでロボット12は、その目的に好適である任意のロボットであり得る。箱は矩形であるが、さまざまな異なる幅、長さおよび高さを有していてよい。グリッパ14は、箱が移動中に安定しているように中心またはその近くで箱を把持する必要があり、そのためにロボット12は、コンベヤ16上および/またはパレット18上の箱の位置および姿勢を知る必要がある。コンベヤ16上およびパレット18上の箱の位置および姿勢を決定するためには、コンベヤ16に対するX-Y-Z原点参照座標系20およびパレット18に対するX-Y-Z参照座標系22を計算して、コンベヤ16またはパレット18から取り上げられる場合の箱に対する参照点を提供することが必要である。この非限定的実施形態において、参照座標系20は、コンベヤ16の右前方の角にあるものとして計算され、参照座標系22は、パレット18の右前方の角にあるものとして計算されている。しかしながら、参照座標系20および22を他の位置にあるものとして計算することが可能である。箱の長さは、X方向であり、箱の幅はY方向であり、箱の高さはZ方向である。
【0010】
以下は、それぞれコンベヤ16およびパレット18上の原点参照座標系20および22を計算するための技術の詳細な論述であり、ここでは、単一の較正箱のみが使用され、較正箱の2つの位置しか記録する必要がない。ロボット制御装置24がロボット12を制御し、本明細書中で論述されている原点参照座標系20および22を計算する。ひとたび較正が完了すると、ロボット12に対する箱の位置および参照座標系20または22を3D表示部28上で見ることができて精度を確認することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
アピュアン株式会社
衝撃工具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
積水ハウス株式会社
フィルム除去具
5日前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社リコー
多関節ロボット
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
協働ロボットシステム
10日前
株式会社清水製作所
電動工具の吊下げ具
14日前
SMC株式会社
ベルヌーイグリッパ
1か月前
コネクテッドロボティクス株式会社
保持システム
7日前
セイコーエプソン株式会社
ロボット
1か月前
株式会社マキタ
打撃工具
10日前
北越メタル株式会社
鉄筋保持具
10日前
株式会社マキタ
打撃工具
14日前
川崎重工業株式会社
作業設備
11日前
株式会社マキタ
回転工具
1か月前
株式会社マキタ
電動工具
1か月前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
トヨタ自動車株式会社
ピッキングロボット装置
18日前
個人
工具、工具セット、部材取外し方法
1か月前
日産自動車株式会社
ロックプレートの圧入治具
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ